SPI协议解析
- 概述
- 接口
- SPI四种通信模式
- 示例
- 最后
概述
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议,比如AT91RM9200。
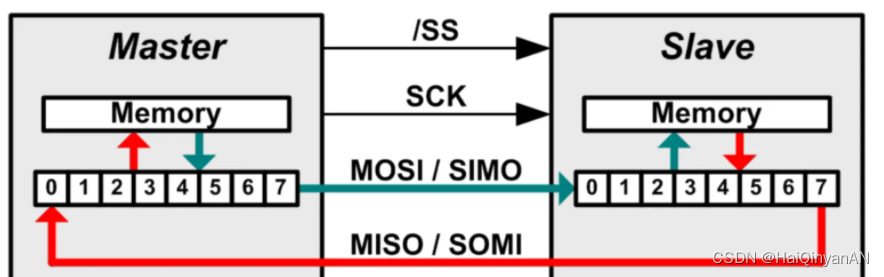
SPI是一种高速、高效率的串行接口技术。通常由一个主模块和一个或多个从模块组成,主模块选择一个从模块进行同步通信,从而完成数据的交换。SPI是一个环形结构,通信时需要至少4根线(事实上在单向传输时3根线也可以)。
接口
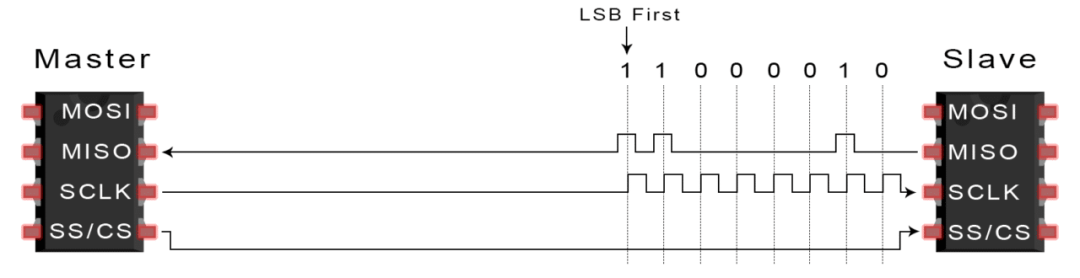
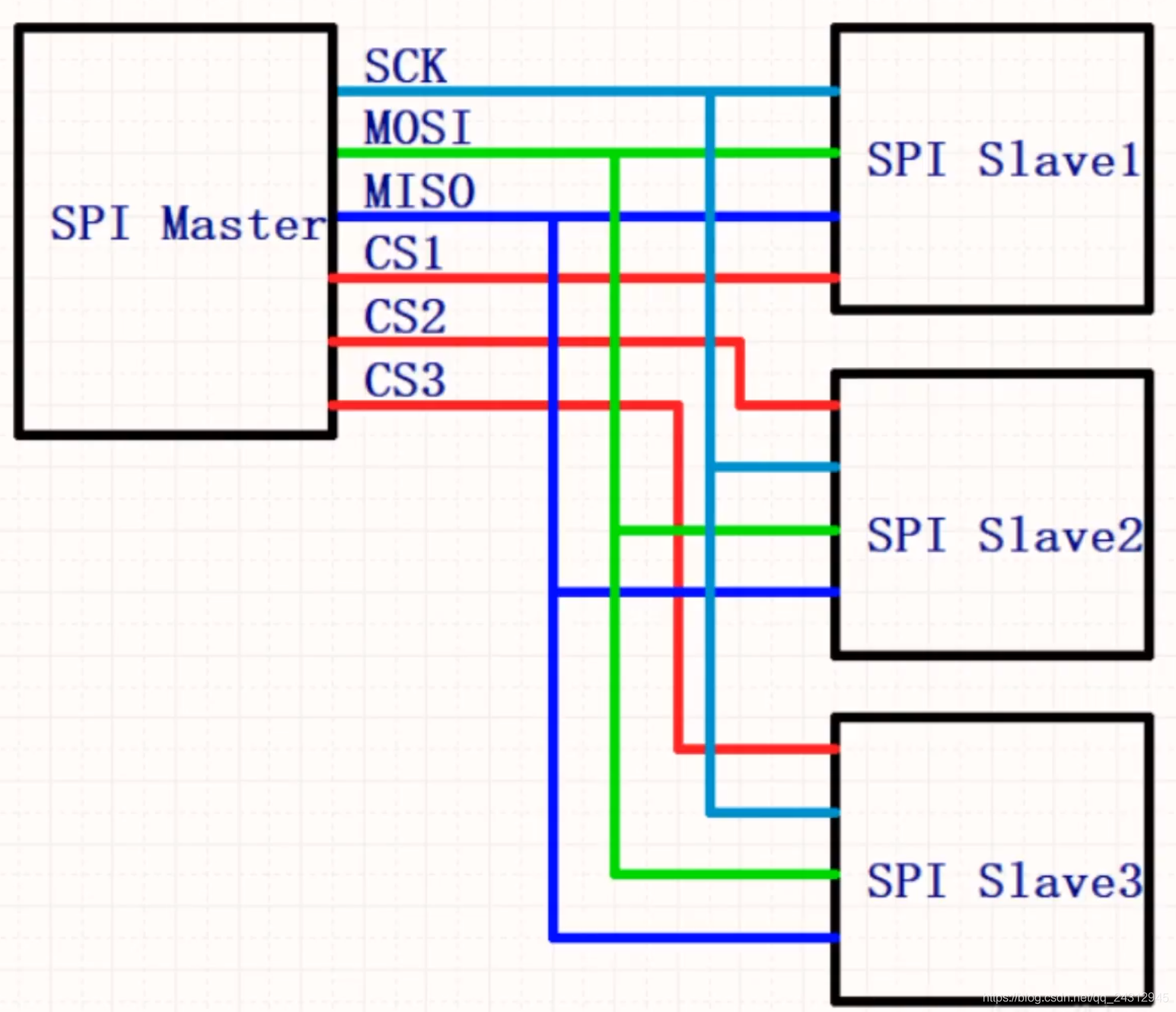
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选)。
- MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
- MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
- SCLK – Serial Clock,时钟信号,由主设备产生;
- CS – Chip Select,从设备使能信号,由主设备控制。
其中,CS是从芯片是否被主芯片选中的控制信号,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),主芯片对此从芯片的操作才有效。这就使在同一条总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCLK时钟线存在的原因,由SCLK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。因此,至少需要8次时钟信号的改变(上沿和下沿为一次),才能完成8位数据的传输。
时钟信号线SCLK只能由主设备控制,从设备不能控制。同样,在一个基于SPI的设备中,至少有一个主设备。这样的传输方式有一个优点,在数据位的传输过程中可以暂停,也就是时钟的周期可以为不等宽,因为时钟线由主设备控制,当没有时钟跳变时,从设备不采集或传送数据。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。芯片集成的SPI串行同步时钟极性和相位可以通过寄存器配置,IO模拟的SPI串行同步时钟需要根据从设备支持的时钟极性和相位来通讯。
最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
SPI四种通信模式
不同的从设备可能在出厂是就是配置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们可以对我们的主设备的SPI模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来
控制我们主设备的通信模式,具体如下:
时钟极性(CPOL)定义了时钟空闲状态电平:
CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
时钟相位(CPHA)定义数据的采集时间。
CPHA=0,在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。,在第2个边沿发送数据
CPHA=1,在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。,在第1个边沿发送数据
例如:
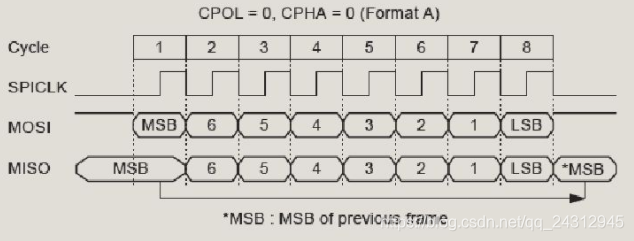
Mode0:CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在上升沿(准备数据),(发送数据)数据发送是在下降沿。
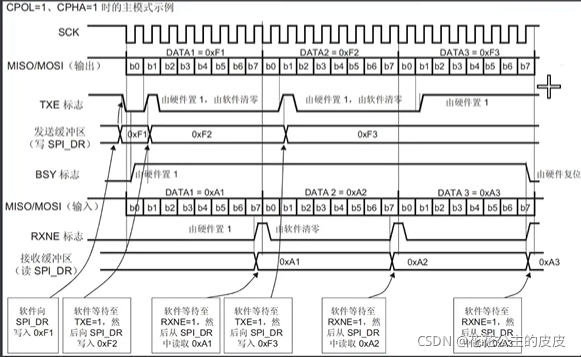
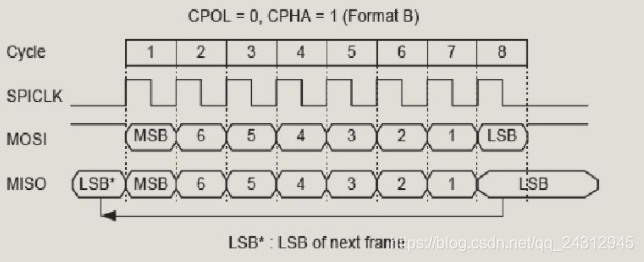
Mode1:CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
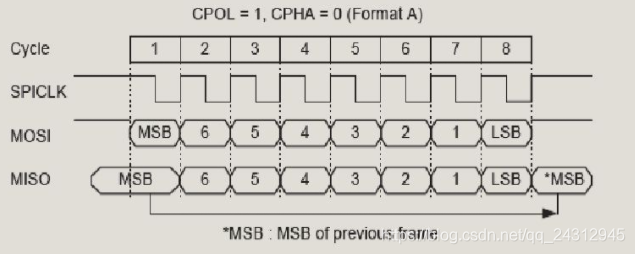
Mode2:CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
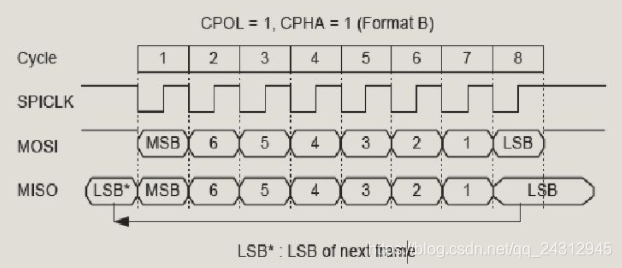
Mode3:CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
| SPI模式 | CPOL | CPOA | 空闲时SCK时钟 | 采样时刻 |
|---|---|---|---|---|
| 0 | 0 | 0 | 低电平 | 奇数边沿 |
| 1 | 0 | 1 | 低电平 | 偶数边沿 |
| 2 | 1 | 0 | 高电平 | 奇数边沿 |
| 3 | 1 | 1 | 高电平 | 偶数边沿 |
这样两两组合就出现了4种通讯模式,但是通信原理是一样的。
示例
使用之前的文章作为案例:STM32CUBEMX(13)–SPI,W25Q128外部Flash移植。
https://editor.csdn.net/md/?articleId=117756829
使用BSP_W25Qx_Init进行初始化,BSP_W25Qx_Read_ID进行读取设备ID。
uint8_t BSP_W25Qx_Init(void)
{ /* Reset W25Qxxx */BSP_W25Qx_Reset();return BSP_W25Qx_GetStatus();
}/*** @brief This function reset the W25Qx.* @retval None*/
static void BSP_W25Qx_Reset(void)
{uint8_t cmd[2] = {RESET_ENABLE_CMD,RESET_MEMORY_CMD};W25Qx_Enable();/* Send the reset command */HAL_SPI_Transmit(&hspi1, cmd, 2, W25Qx_TIMEOUT_VALUE); W25Qx_Disable();}/*** @brief Reads current status of the W25Q128FV.* @retval W25Q128FV memory status*/
static uint8_t BSP_W25Qx_GetStatus(void)
{uint8_t cmd[] = {READ_STATUS_REG1_CMD};uint8_t status;W25Qx_Enable();/* Send the read status command */HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE); /* Reception of the data */HAL_SPI_Receive(&hspi1,&status, 1, W25Qx_TIMEOUT_VALUE);W25Qx_Disable();/* Check the value of the register */if((status & W25Q128FV_FSR_BUSY) != 0){return W25Qx_BUSY;}else{return W25Qx_OK;}
}
/*** @brief Read Manufacture/Device ID.* @param return value address* @retval None*/
void BSP_W25Qx_Read_ID(uint8_t *ID)
{uint8_t cmd[4] = {READ_ID_CMD,0x00,0x00,0x00};W25Qx_Enable();/* Send the read ID command */HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE); /* Reception of the data */HAL_SPI_Receive(&hspi1,ID, 2, W25Qx_TIMEOUT_VALUE);W25Qx_Disable();}
定义如下。
/* Reset Operations */
#define RESET_ENABLE_CMD 0x66
#define RESET_MEMORY_CMD 0x99
/* Identification Operations */
#define READ_ID_CMD 0x90
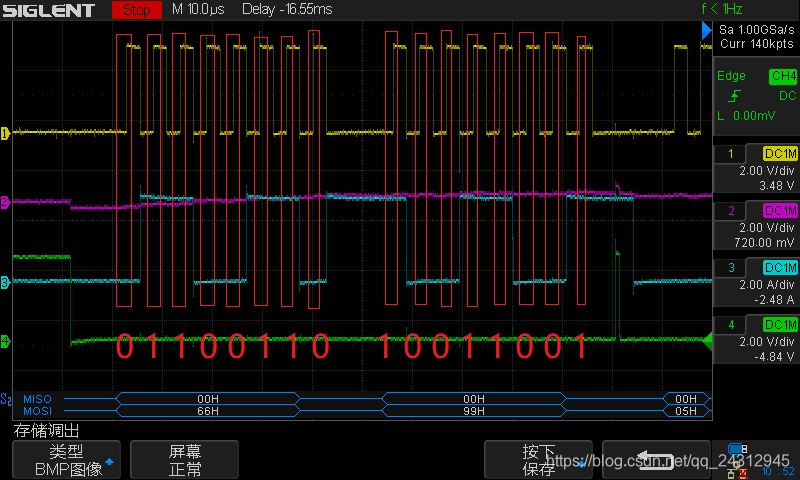
首先进行初始化,函数为BSP_W25Qx_Init(),其中含有2个函数,分别是BSP_W25Qx_Reset()和BSP_W25Qx_GetStatus();在BSP_W25Qx_Reset()中为发生0x66和0x99,在BSP_W25Qx_GetStatus()中为发生0x05,之后获取一个uint8_t类型的数据。
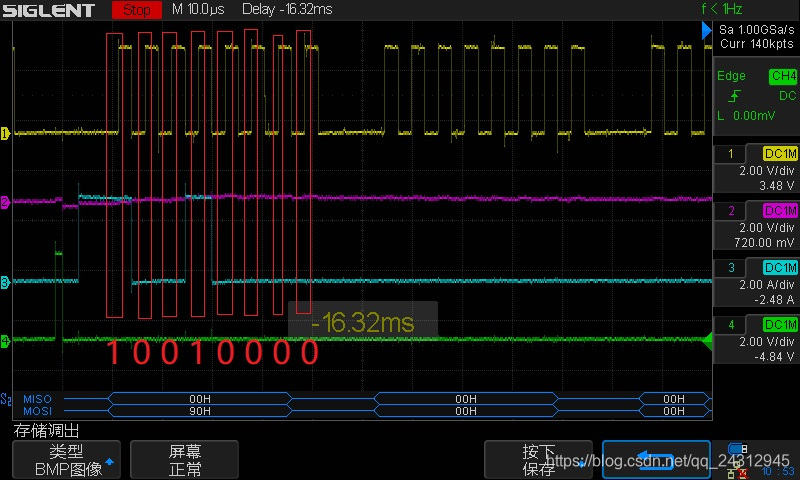
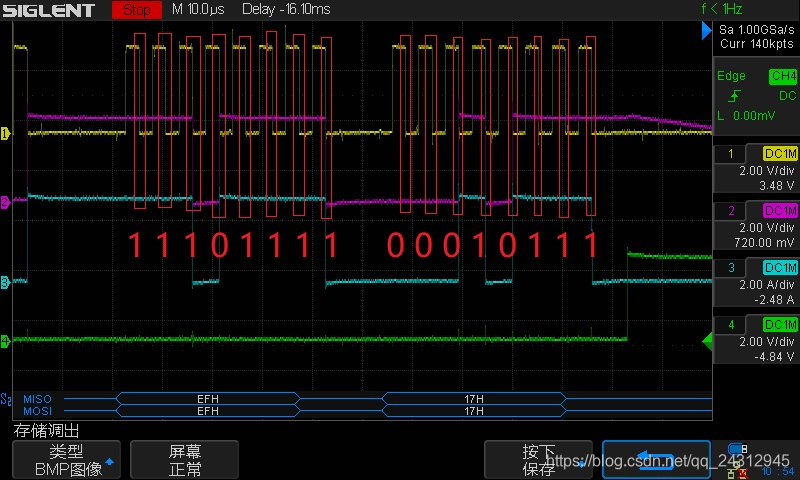
之后进行读取ID,函数为BSP_W25Qx_Read_ID(),首先发送4个字节的数据,分别是0x90,0x00,0x00,0x00,之后读取设备ID,为2个字节的数据,W25Q128的ID为0XEF17。
HAL_SPI_Transmit,HAL_SPI_Received都是半工通信,HAL_SPI_Transmits使用的时候MOSI上有数据,忽略MISO,HAL_SPI_Received反之,HAL_SPI_TransmitReceive是全双工通信,发送数据的同时也在接收数据,故在HAL_SPI_Receive读取的时候,虽然也有发送数据,但是忽略。
通过示波器抓取的波形如下所示。

首先查看初始化设备发送的0x66和0x99的波形。
在查看读取设备ID发送的0x90,0x00,0x00,0x00的波形。
在查看设备发送给主机的ID波形。
HAL_SPI_Transmit,HAL_SPI_Received都是半工通信,故在HAL_SPI_Receive读取的时候,虽然也有发送数据,但是忽略。
最后
以上的代码会在Q群里分享。QQ群:615061293。
或者关注微信公众号『记贴』,持续更新文章和学习资料,可加作者的微信交流学习!