简 介: 这个文章来自于太原理工大学萧老师给智能车竞赛无线导航方案的建议。
关键词: 智能车竞赛,导航,无线电,萧老师
卓晴老师你好!
节能信标组利用信标发出的信号对信标定位。用摄像头定位比较容易实现。但是,若只用一个摄像头必定有盲区,需要用其他方法辅助确定信标在车的左后方还是右后方,以便让车模正确转向。
信标提供了3种可供选择的信号:红光、红外光和无线电波。
其中无线电信号传播距离较远,于是首先考虑无线电定位技术。可以利用的条件有:收发天线的方向性,信号的幅度和相位,传播时差。
§01 三种无线定位方式
下面分别讨论。
1. 收发天线的方向性
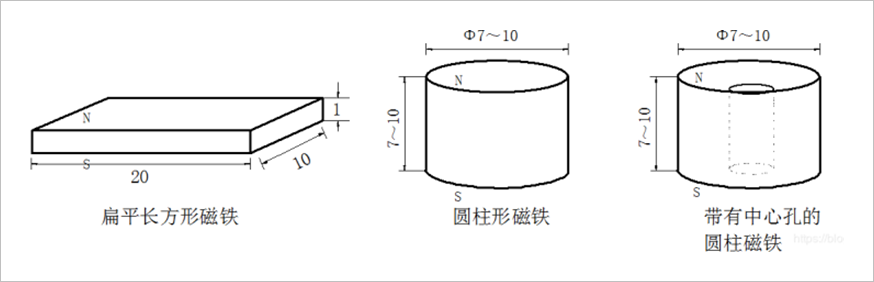
发射天线在水平面上的方向性图是圆形的,各向同性,所以只好寄托于接收天线(包括电感)的方向性。我们分别采用了磁棒线圈、工字型电感、鞭状天线、对称振子天线、环形天线等多种接收方法,它们接收灵敏度各有不同,但都无法判断信标的方位。试图用电磁屏蔽方法人为制造方向性,也没有效果。
通过理论分析发现,当信标距离D>3m天线高度H<D/10时,磁力线几乎是垂直于地面均匀分布的,所以很难利用它来确定信标的方位。
当H/D>0.1时,磁力线向信标一侧的倾斜角β>5.7°,勉强可以用来判断信标的方位,但为时已晚,因为此时已经开始用摄像头定位了。另外接收天线太高对节能不利。
结论:利用天线的方向性确定信标方位,可能性很小。

2. 信号的幅度和相位
信号幅度A会随距离D的增大而减小,信号相位φ会随距离D的增大而滞后。可以通过A和φ获得距离D的信息。但:
- 当D>3m时,A随D的变化不明显。受电路误差和环境噪声的影响,A的变化会被淹没掉。
- 当D<2m时,A随D的变化比较明显,可以通过A来获得D的信息。但在有摄像头的情况下,这一信息已经失去了意义。
信标发出的无线电信号频率f=150kHz,波长λ=c/f≈2000m。鉴相器的分辨力是1°,所对应的长度为λ/360=5.6m,误差太大。
结论:利用信号幅度和相位确定信标距离,误差太大。
3. 传播时差
因为无线电波速=光速c,1m距离对应的时差=1/c=3.3ns。要检测如此短暂的时差,对于参赛车队来说简直就是一种奢望。
结论:利用时差来确定信标的距离,难度太大。
综上所述,利用信标发出的信号对信标定位,应该首选摄像头,最好用2个广角摄像头或3个普通摄像头。利用红光、红外光和无线电波对信标定位或辅助定位难度较大。

§02 对无线导航的建议
1. 一般无线电导航系统中,电磁波的磁场方向与地面平行,电场方向与地面垂直。所以建议发射天线改用30cm竖直鞭状柔性天线,底部装有防撞弹簧。
2. 为了便于利用相位信息来定位,建议将无线电信号频率改为150MHz(左右)。实验表明,当发射功率=50mW(不必向无委会申报)时,有效传播距离可达150m。
3. 接收电路可以采用普通接收机电路,鉴相鉴幅芯片有多种型号可供选择。例如AD8302鉴相鉴幅芯片,最高工作频率高达2.7GHz,鉴相精度为1°。150MHz电磁波的波长为2m,1°所对应的长度为2/360=5.6mm。假如赛车上的两个接收天线相距25cm,由传输延迟所产生的最大相位差为45°,完全可以被鉴相器检测出来。
另外,还可利用AD8302的鉴幅功能检测信标的距离,此处不再赘述。

150MHz信号发射器非常简单,只需一个2SC9018小功率三极管,再加几个外围零件就可以了。5V供电,工作电流15mA,发射功率不超过50mW,无线向无线电管理委员会申请。
(现在学生给你提出的问题)几乎都是关于信号强度的讨论,但是强度信息很不可靠。我在给你的短信中讨论过,除了强度信息与距离有关之外,其他信息(方向性、相位差、时差等)几乎无法利用。
定位信息包括距离和方位两个参数。只有距离信息是不够的,必需有方位信息。但是如果有两个接收点,能得到两个方位角,二者交汇点就是定位目标的位置。因此方位信息是必要条件,而距离信息只是充分条件而不是必要条件。
§03 为什么无线导航困难?
1、150kHz无线导航方法分析
如图所示。

▲ 图3.1 无线导航定位几何关系
- 一点定位法(距离+方位)
如果赛车在A点能够同时测得当前信标的距离DA和方位βA,就可以及时确定信标的位置P。 - 二点定位法(只有方位)
如果赛车在A点只能测得当前信标的方位βA,还得行走一段距S,在B点再次测得信标的方位βB,然后利用两角夹边的几何方法确定信标的位置P。 - 三点定位法(只有距离)
如果赛车在A点只能测得当前信标的距离DA,还得行走一段距里S1,在B点再次测得信标的距离DB,接着再行走一段距S2,在C点再次测得信标的距离DC,才能唯一确定信标的位置P。
因为现在信标发射的无线电波的水平方向性图是一个圆,磁场方向垂直于地面,电场方向平行于地面,所以无法获得方位信息,只能获得距离信息。于是只能采用“三点定位法”,也就是说,赛车在行走过程中必须不断地检测距离信息才能在第三点唯一确定信标的位置。因此位置信息的获得很不及时。此外,号幅度(或强度)与距离的关系很不确定。一方面是受噪声、反射波和电路误差的影响;另一方面是当距离较远时,信号幅度随距离的变化很小。
总之,“不及时、不准确”是“三点定位法”的致命弱点。然而“一点定位发法”和“二点定位法”都需要首先获得方位信息,这在现有条件下又是不可能的。可见,无线电导航的用处不大。