算是基于滑窗的VIO的必读文章吧,很详细地说了边缘化~
paper:
http://in.ruc.edu.cn/wp-content/uploads/2021/01/Keyframe-Based-Visual-Inertial-Odometry-Using-Nonlinear-Optimization.pdf![]() http://in.ruc.edu.cn/wp-content/uploads/2021/01/Keyframe-Based-Visual-Inertial-Odometry-Using-Nonlinear-Optimization.pdf一、简介/贡献
http://in.ruc.edu.cn/wp-content/uploads/2021/01/Keyframe-Based-Visual-Inertial-Odometry-Using-Nonlinear-Optimization.pdf一、简介/贡献
对于VIO系统, 通过紧耦合和非线性优化,能够在视觉部分有outlier的时候大幅提升精度;
提供了一种在线相机外参的标定方法;
细节详细,方便re-implemantation
二、包含惯性项的批视觉slam(Batch Visual SLAM with Inertial Terms)
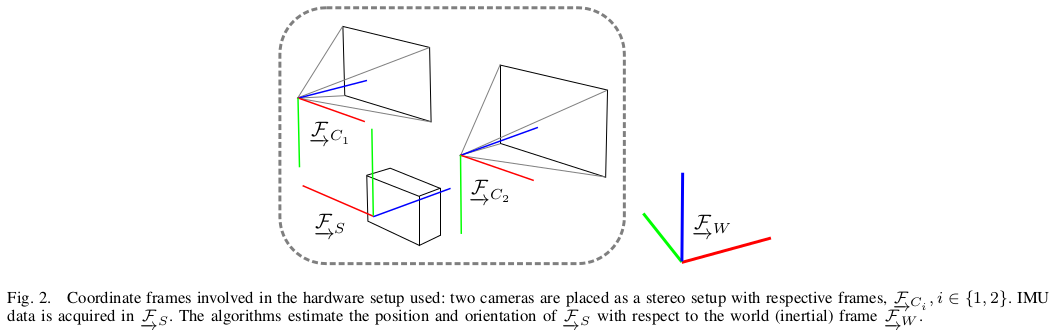
坐标系定义:
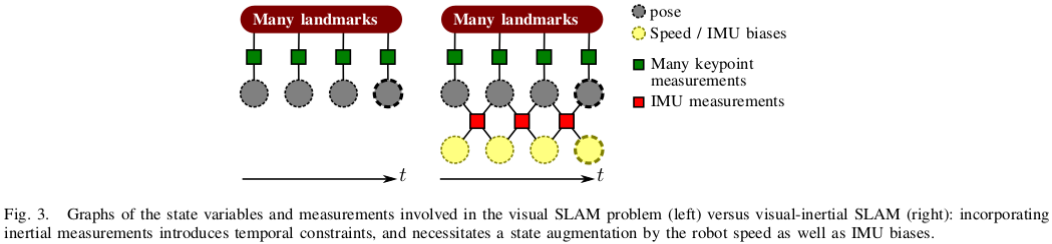
需要求解的状态如下:

Cost Function:

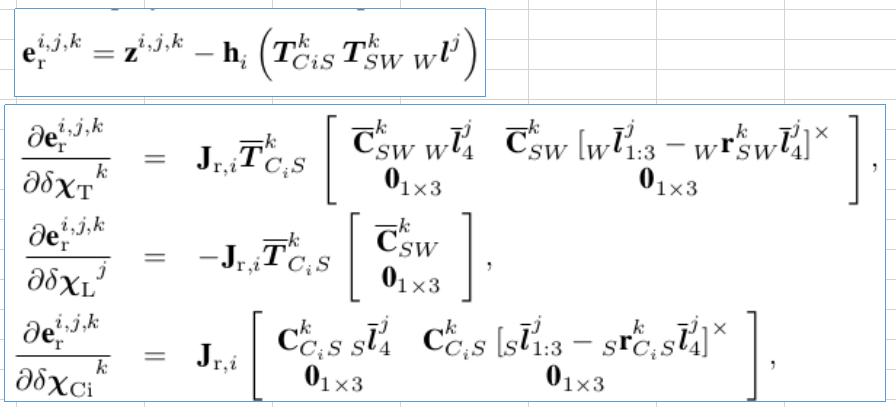
a. 重投影误差(Reprojection Error Formulation)
重投影误差及其Jaccobin,可以参考高博书的第四章和第七章:
b. IMU运动学及其偏差模型(IMU Kinematics and Bias Model)
(详见论文)
c. IMU测量误差项(Formulation of the IMU Measurement Error Term)

三、前端概览 (Frontend Overivew)
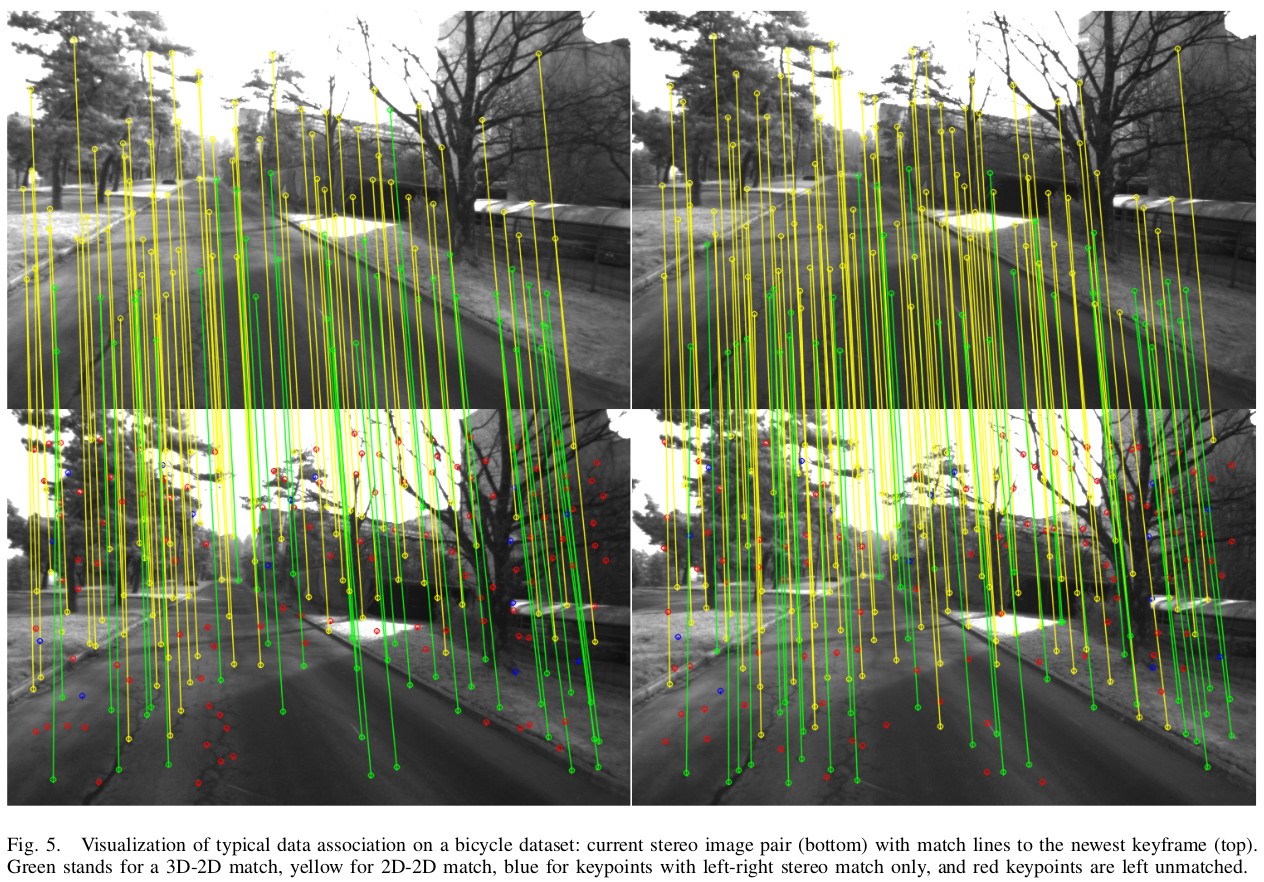
3.1 关键点匹配,检测和变量初始化 (Keypoint Detection, Matching, and Variable Initialization)
关键点和描述子分别是: SSE-optimized Harris corner detector + BRISK descriptor
匹配步骤:
a. 根据IMU大致预测当前帧的位置, 且获得可观测到的地图点;
b. 3D 到 2D 匹配:深度收敛的地图点直接在当前帧匹配, 用匹配结果通过RANSAC计算当前帧的绝对位姿;
c. 2D到2D匹配: 当前帧无地图点的关键点和所有active关键帧中深度没有收敛的关键点(any previous frames available)匹配 -> 三角化估计这些点的空间位置->位置uncertainty低的加入地图点->RANSAC求当前帧到最新一帧的相对位姿(怎么求,有什么作用没有看懂)。
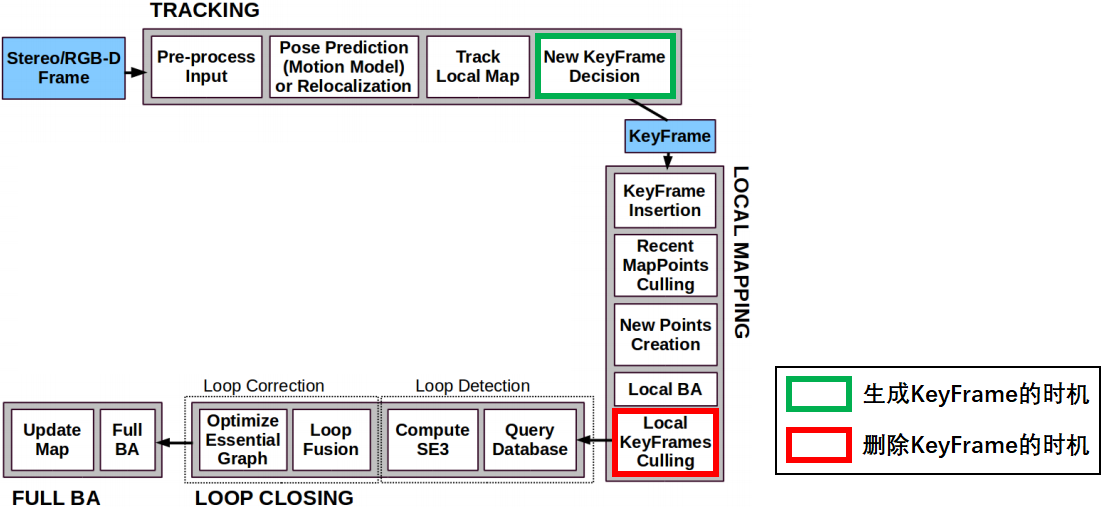
3.2 关键帧选择 (Keyframe Selection)
当3D to 2D匹配的点数小于检测出的的关键点的50%, 或者2D to 2D匹配的点数小于检测出的的关键点的20%时, 就认为当前帧可以作为一个关键帧;
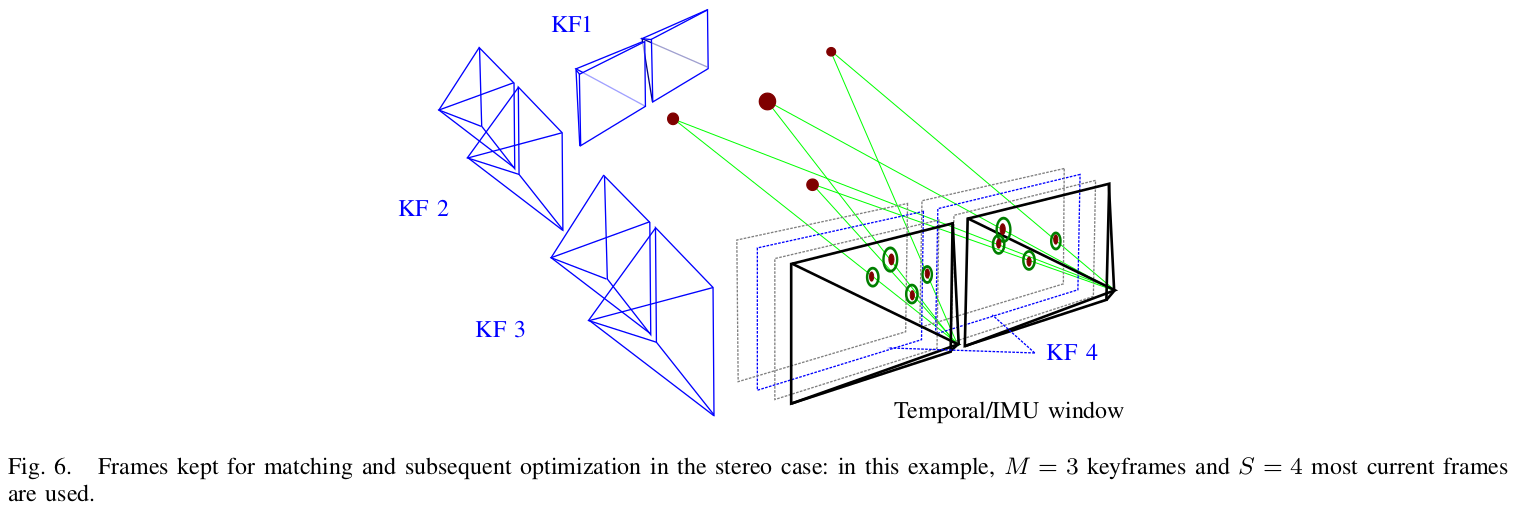
四、关键帧和边缘化 (Keyframes and Marginalization)
4.1 边缘化的数学基础(Mathematical Formulation of Marginalization in Nonlinear Optimization)
非常详细的博客: 滑窗优化——边缘化_一抹烟霞的博客-CSDN博客_滑动窗口边缘化![]() https://blog.csdn.net/qq_34213260/article/details/120359990#t17
https://blog.csdn.net/qq_34213260/article/details/120359990#t17
关于“First Order Jacobin”: (2011, icra) Motion tracking with fixed-lag smoothing: Algorithm and consistency analysis
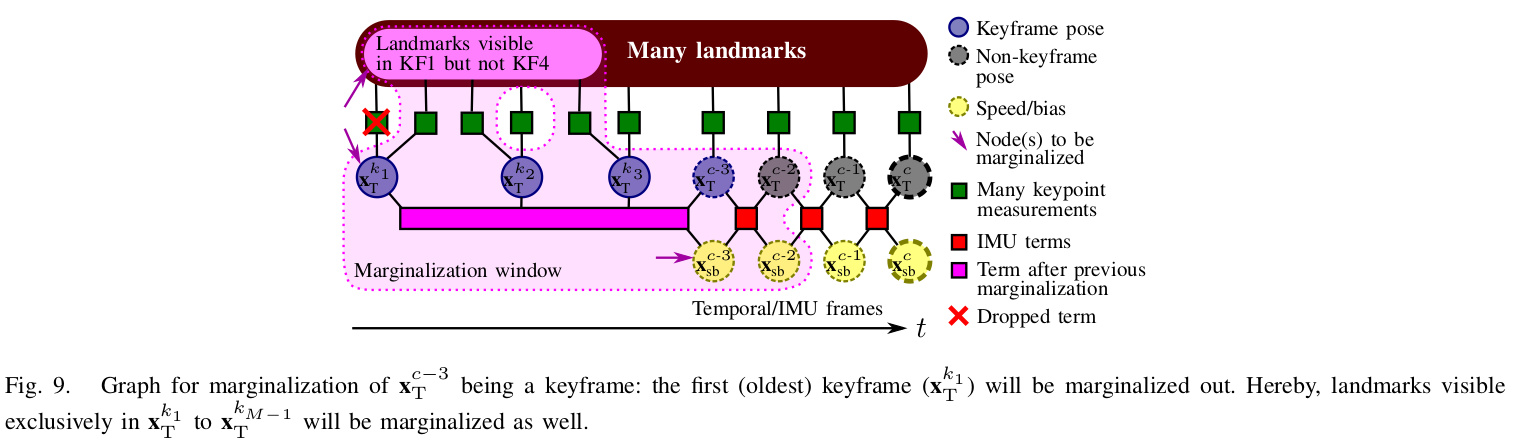
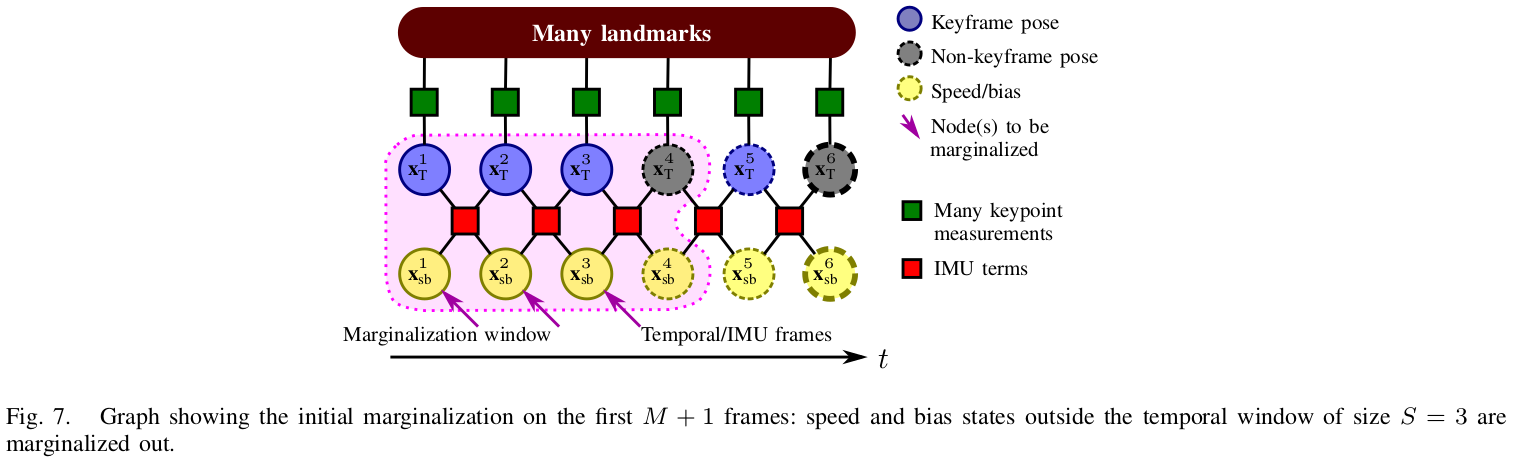
4.2 具体边缘化策略(Marginalization Applied to Keyframe-Based Visual-Inertial SLAM)
对要边缘化的状态的选择遵循原则:1. 保证H矩阵不要太大;2. 保证H矩阵的稀疏性;
首先会marg一些IMU Bias和速度
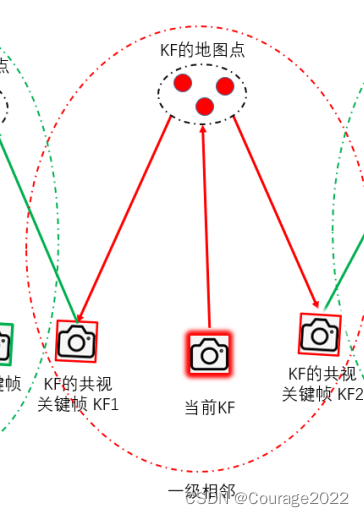
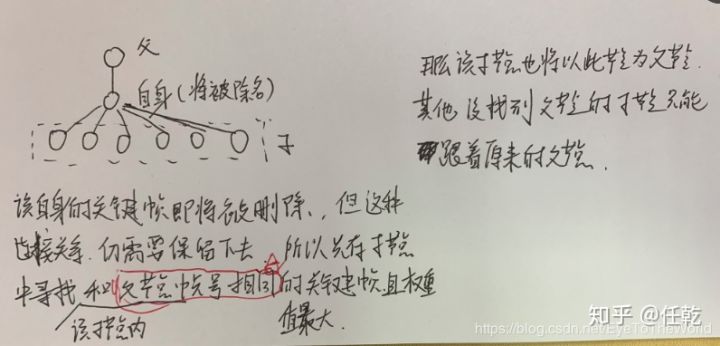
对于非Key Frame的帧, 丢弃其地标点, marg掉pose, IMU bias和速度:
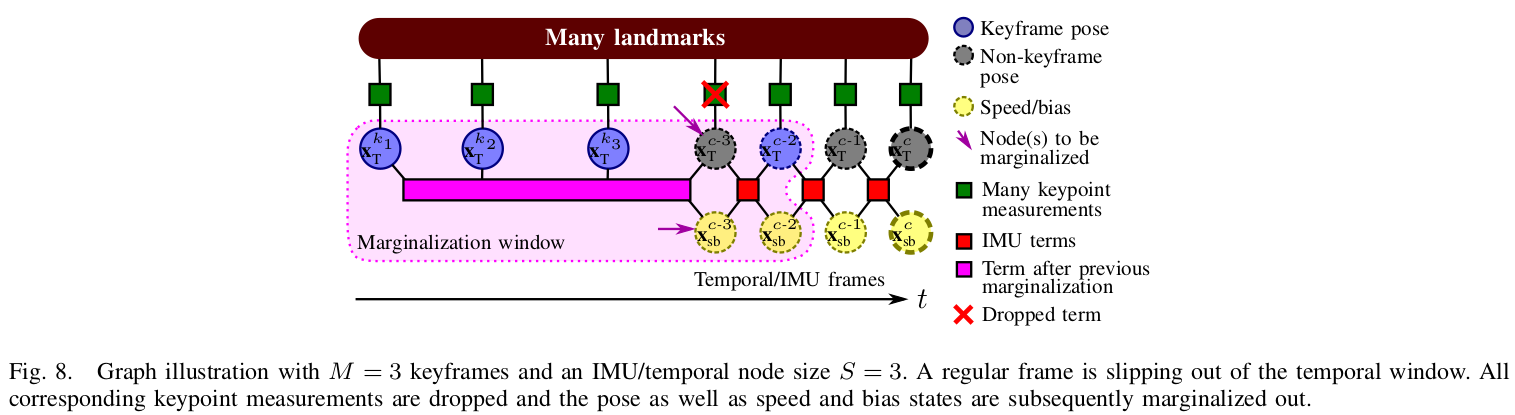
对于Key Frame的帧, , marg掉pose, IMU bias和速度,以及不被最新Key Frame看到的地标