七大排序之插入排序
文章目录
- 七大排序之插入排序
- 前言
- 一、直接插入排序
- 1.1 算法图解
- 1.2 算法稳定性
- 1.3 插入排序和选择排序相比到底优在哪?
- 二、折半插入排序
- 总结
前言
博主个人社区:开发与算法学习社区
博主个人主页:Killing Vibe的博客
欢迎大家加入,一起交流学习~~
一、直接插入排序
插入排序是一种最简单直观的排序算法,它的工作原理是通过构建有序序列,对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插入。
1.1 算法图解
其实就是打牌码牌的过程。
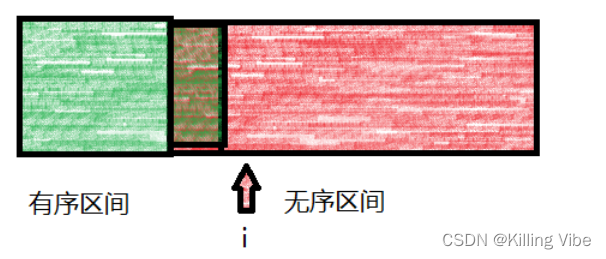
- 将待排序的集合看做两部分,已排序的区间(0…i) ; 待排序的区间[i…n);
- 每次选择无序区间的第一个元素插入到有序区间的合适位置,直到整个数组有序。
初始数据越接近有序,效率越高,经常作为高阶排序算法优化手段。

代码如下:
public static void insertionSort(int[] arr) {for (int i = 1; i < arr.length; i++) {// 已排序区间[0...1)// 待排序区间[i ..n)// 选择无序区间的第一个元素,不断向前看// 注意看内层循环的终止条件 j >= 1而不是 j >= 0 ?// 因为此时arr[j] 不断向前看一个元素 j - 1 要合法 j - 1 >= 0for (int j = i; j >= 1 && arr[j] < arr[j - 1]; j--) {swap(arr,j,j - 1);
// // 边界
// if (arr[j] > arr[j - 1]) {
// // arr[i] 恰好是有序区间的后一个元素,无序区间的第一个元素
// // 当前无序区间的第一个元素 > 有序区间最后一个元素
// break;
// }else {
// swap(arr,j,j - 1);
// }}}}注意事项:
当arr[i] > arr[i-1] 时 ,说明此时arr[i] 大于有序区间的所有元素!!!
直接跳过内层循环,外层i++
举个栗子:
算法走到一半时:
- 有序区间: [1,2,3,4,5]
- 无序区间:[6,9,8,7,2,10]
1.因为 6 > 5 , 所以直接跳过内层循环了,然后 i++
2.有序区间变成 [1,2,3,4,5,6]
3.只有当arr [i] < arr[i - 1] 的时候才需要移动元素
4.从当前元素不断向前看,往前交换 swap(arr,j,j-1)
5.一直碰到arr[j] > arr[j - 1] 就停止,即插入到了合适的位置。
1.2 算法稳定性
当arr[j] >= arr[j - 1] 不会交换其顺序,循环退出了。

所以插入排序是一个稳定性的算法。
1.3 插入排序和选择排序相比到底优在哪?
1.和选择排序最大的区别:
当已经排序的集合的最后元素 < 当前无序区间的第一个元素,内层循环可以直接退出,大大降低了时间。
2.极端情况:
若待排序的数组就是一个完全升序数组,插入排序就会进化为O(n) = > 内层循环一次也不走,最好情况时间复杂度
二、折半插入排序
选择无序区间的第一个元素插入到”有序区间“的位置时,优化他的插入位置的查找次数。
也就是有序区间的查找用二分查找。
代码如下:
public static void insertionSortBS(int[] arr) {// 有序区间[0..i)// 无序区间[i..n)for (int i = 0; i < arr.length; i++) {int val = arr[i];// 有序区间[left...right)int left = 0;int right = i;while (left < right) {int mid = (left + right) / 2;if (val < arr[mid]) {right = mid;}else {// val >= arr[mid]left = mid + 1;}}// 搬移[left..i)的元素for (int j = i; j > left ; j--) {arr[j] = arr[j - 1];}// left就是待插入的位置arr[left] = val;}}举个栗子:
当算法进行到一半时:
绿色框框已经是有序数组,红色是待排序数组。
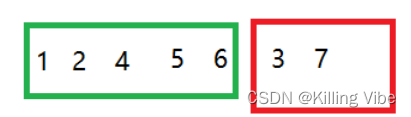
对绿色框框里面的元素用二分查找的方法:
left = 0 ; right = i; mid = (left + right) / 2;
- 第一轮开始 l = 0,r=5,mid = 2 ,比较当前元素和arr[mid]的大小关系,3<4, 就把right = mid = 2,往mid的左区间【1 2】来查找
- 第二轮开始 l = 0 , r = 2, mid = 1 , 重复上述操作,3 > arr[mid] 也就是2,所以 l = mid+1 = 2
- 第三轮开始 l= 2,r = 2,此时 l > = r 循环终止,此时需要插入的位置就是 l
- 此时只需要将[l…i)的元素往后搬移即可
总结
以上就是插入排序的图解和代码,有什么疑问可以私信博主~有帮助的话可以关注博主后续更新。





![[数学建模]学习笔记1:初等建模](https://img-blog.csdnimg.cn/20201115165409677.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80NjI4NTA4MQ==,size_16,color_FFFFFF,t_70#pic_center)