尾矿库现状调查是矿山安全生产工作的重要组成部分,也是监管部门关注的焦点。及时对尾矿库的现状进行调查,对存在的问题提出合理的整治方案,是控制尾矿库发生灾害的有效手段之一。本文以中维空间应用无人机倾斜摄影技术和三维激光扫描技术在某尾矿库三维现状分析为例,阐述了数据采集方法与过程,并对成果数据进行对比分析,得到不同数据的精度和应用方向,为三维数据的应用提供了参考,也可为矿山安全生产提供可靠的技术支撑。


通过无人机倾斜摄影三维建模技术,快速构建相关企业精细化、可量测、高精度、对象化、更新快、定制化的三维地理信息,直观地掌握目标区域内地形地貌与所有建筑物和生产设施的细节特征,为安全生产监管、应急救援指挥、事故灾害调查等提供详尽、精确、逼真的空间基础地理信息数据支持。
摄影范围:尾矿库初期坝、堆积坝、库区、排洪构筑物等全 覆盖;尾矿库下游 1 公里范围内的地形、地貌、村庄、道路(铁 路、公路)、其他设施等全覆盖。

尾矿库作为矿山三大控制性工程之一,同时也是矿山的重大危险源。我国现有超过8000座具有一定规模的尾矿库,每年排出近3亿吨尾沙,需耗水3.5亿吨。 据专家估计,这些尾矿库只有不到70%是正常运行的。近年来我国发生了一系列尾矿库事故,给国家、企业及广 大人民的生命财产造成了巨大的损失,严重影响了社会 稳定和经济可持续发展。如何有效地对尾矿库的现状进行分析,控制尾矿库发生灾害是目前急需解决的问题。
传统的尾矿库现状分析方法通常是通过人工现场排查,或者利用一般的测量手段获取尾矿库的几何信息,这种作业模式效率低、数据完整性不强,更不能实现三维可视化的分析。将无人机倾斜摄影三维建模技术应用于尾矿库三维现状分析,由于其具有作业模式灵活、运行成本低、适合较复杂小型区域、能够获得高分辨率影像等优点,可以实现尾矿库库区范围的定位分析。而三维激光扫描技术具有一次性数据获取量大、点云精度高、数据获取速度快、无接触式测量等优点,克服了传统测量方式一次只能获取一个点坐标的困难,将三维激光扫描技术应用于尾矿库三维现状分析,可以有效解决传统作业模式效率 低、数据精度不高的问题,更好地对尾矿库的关键构筑物进行定量分析,与低空无人机摄影测量技术相结合,实现尾矿库三维可视化现状分析。


中维空间对尾矿库三维现状分析过程
1.数据采集与处理
根据某尾矿库的地形及当地天气情况开展无人机航测作业,采用无人机航测系统对尾矿库及周边区域进行航飞,作业按照1:2000的测设要求进行航线规划,飞行高度650米,地面平均分辨率12cm,并按照要求布设地面像控点。此次无人机影像数据采集,共在作业区域内获得影像338张、pos数据338个、有效像片控制点28个。通过专业软件对原始影像数据进行质量检查、数据 预处理、自动空三加密等处理后,得到某尾矿库及周边的DOM/DSM及点云数据。
1.2 数据成果精度分析
对获取的无人机和三维激光扫描数据进行精度分析,验证其精度和可靠性,从而达到数据质量检查的目的。无人机数据平面坐标验证是在正射影像图上提取检查点的坐标,和传统测量方式得到的实测坐标进行对比,高程值验证是在点云上提取平地检查点的高程与实测高程值进行对比。三维激光扫描成果数据精度的评定分析,是对提取坐标点的高程值与实测坐标的高程值进行对比。
1.2.1 精度评定方法
三维成果数据的精度验证采用实测值为真值计算检 查点坐标中误差的方法,计算公式如下:

1.2.2 三维成果数据平面和高程精度分析
经过计算分别得出无人机成果数据检查点的点位中误差和高程中误差见表1和表2。三维激光扫描数据检查点高程中误差见表3。


通过对检查点坐标数据和实测数据进行对比分析,得出无人机成果数据点位中误差为0.189m,高程中误差为0.271m,三维激光扫描数据检查点的高程中误差为0.058m,满足相关规范及尾矿库三维现状分析的精度要求。
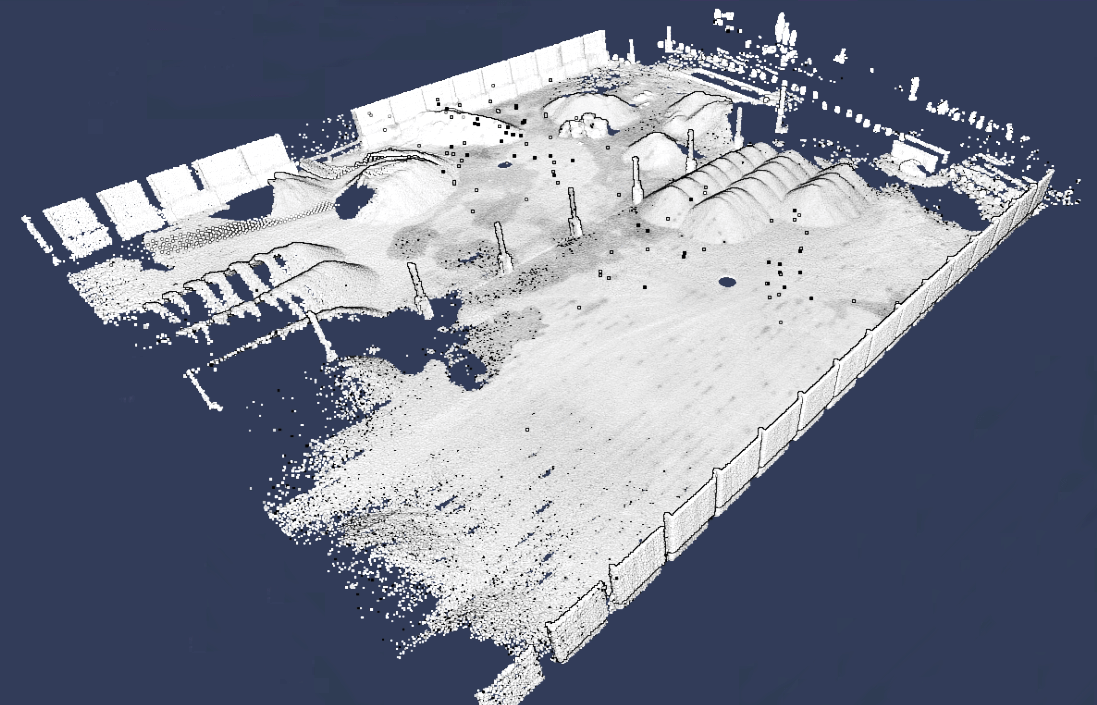
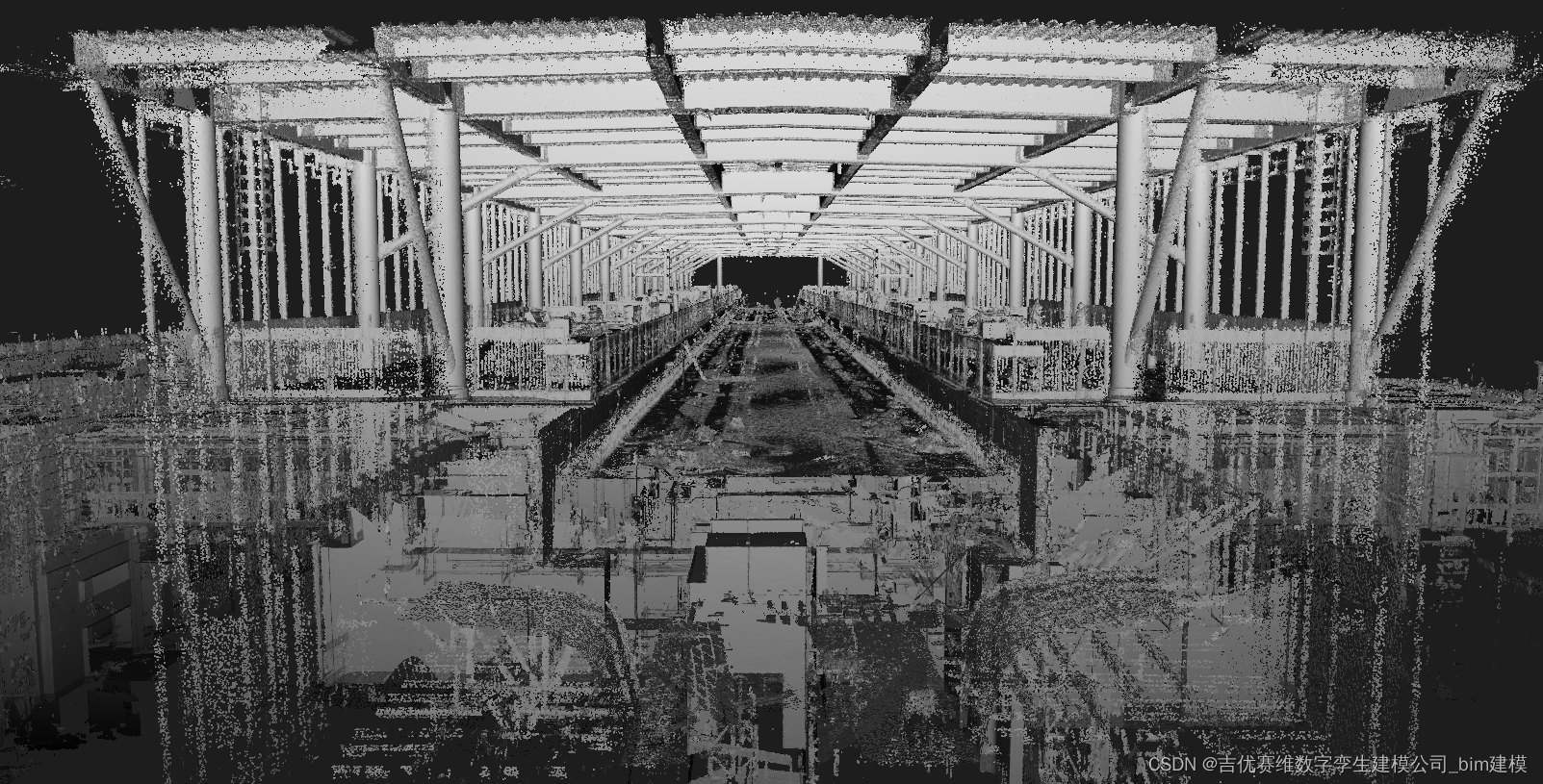
1.3 尾矿库三维现状分析
某尾矿库三维现状分析是在已获取的三维成果上进行量算和特征参数提取,对量算结果与设计资料进行对比,得到尾矿库现状基本情况的过程。结合原有资料和人工现场调查,以无人机正射影像图为底图,结合高程模型划定库区汇水区区域、主沟长度及最小干滩长度,测得汇水区面积为0.561平方千米,主沟长度为1.1813千米,最小干滩长度为159.777m。根据尾矿库三维立体模型,结合最终设计参数,得到尾矿库最终堆排效果如图 4 所示,利用尾矿库及下游区域的地形数据,还可以对尾矿库进行溃坝模拟分析。利用三维激光数字高程模型,根据某尾矿库坝体几何结构特征,布设剖面提取坝体关键参数,作为尾矿库安全现状分析的依据,具体的参数包括反应尾矿库大小的库容、库区含水情况的干滩长度、坡比、堆积标高、坝高等,结果见表4。通过与设计规范进行对比,发现某尾矿库存在轻微的安全问题:
一级 子坝的外坡比、子坝段高、马道宽度均小于设计要求;
整个堆积坝外坡比为1:4.47,小于设计要求的1:5。其他现状参数基本符合设计和规范要求。

通过某尾矿库三维现状分析的过程可以得出以下结纶:
1)低空无人机摄影测量技术与三维激光扫描技术在 矿山危险源三维分析中有较好的应用前景,其数据精度 符合矿山安全生产的基本要求;
2)低空无人机倾斜摄影技术实现了对尾矿库空间范围的定位分析,并实现了多角度、多尺度对尾矿库现状进行分析,丰富了尾矿库现状分析的数据源;
3)采用三维激光扫描技术对尾矿库进行精确的定量分析,精准测定尾矿库的几何形状,在保证尾矿库关键设施数据精度的前提下,实现了尾矿库现状基本参数测定的三维可视化,大大缩减尾矿库隐患排查的工作量,为尾矿库稳定性分析提供了可靠的技术支撑。
4)尾矿库倾斜摄影来源:中维空间

![[数学建模]学习笔记1:初等建模](https://img-blog.csdnimg.cn/20201115165409677.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80NjI4NTA4MQ==,size_16,color_FFFFFF,t_70#pic_center)