概率论
0. 前言
本文主要旨在对概率论的基础概念与知识进行概要的总结,以便于使用到时可以参考。
概率论是数理统计的基础,也是很多机器学习模型的支撑,概率论在机器学习中占主要地位,因为概率论为机器学习算法的正确性提供了理论依据。
1. 概率论的基本概念
1.1 基本概念
随机实验(E)
(1)可以在相同的条件下重复地进行
(2)每次实验的可能结果不止一个,并且事先明确知道实验的所有可能结果
(3)每次试验将出现哪一个结果无法预知
例子:抛一枚硬币,观察正面,反面出现的情况
样本空间 (Ω)
随机试验所有可能的结果组成的集合
样本点
样本空间的元素,即每个可能的结果
随机事件
随机试验E的样本空间S的子集称为随机事件
基本事件
样本空间的单个元素,一个可能结果构成的集合
必然事件(全集)、不可能事件(空集)
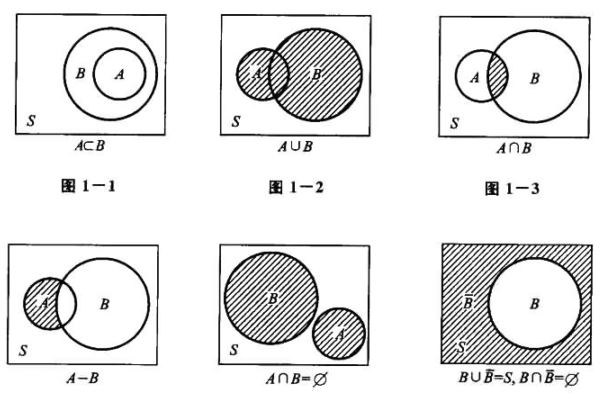
事件的关系与事件的运算 (类似于集合运算)
包含关系、和(并)并事件、积(交)事件、差事件、互不相容(互斥)、逆事件(对立事件)
运算规律
1、交换律:
A ∪ B = B ∪ A A∪B = B∪A A∪B=B∪A
A ∩ B = B ∩ A A ∩ B = B ∩ A A∩B=B∩A
2、 结合律:
A ∪ ( B ∪ C ) = ( A ∪ B ) ∪ C A∪ (B∪ C) = (A∪ B) ∪ C A∪(B∪C)=(A∪B)∪C
A ∩ ( B ∩ C ) = ( A ∩ B ) ∩ C A ∩ (B ∩ C)=(A ∩ B) ∩ C A∩(B∩C)=(A∩B)∩C
3、分配律:
A ∪ ( B ∩ C ) = ( A ∪ B ) ∩ ( A ∪ C ) A∪ (B ∩ C) = (A∪ B) ∩ (A ∪ C) A∪(B∩C)=(A∪B)∩(A∪C)
A ∩ ( B ∪ C ) = ( A ∩ B ) ∪ ( A ∩ C ) A ∩ (B∪C) = (A ∩ B) ∪ (A ∩ C) A∩(B∪C)=(A∩B)∪(A∩C)
A ∩ ( B − C ) = ( A ∩ B ) − ( A ∩ C ) A ∩ (B - C) = (A ∩ B) - (A ∩ C) A∩(B−C)=(A∩B)−(A∩C)
4、德摩根律(对偶律):
A ∪ B ‾ = A ‾ ∩ B ‾ \overline{A ∪ B} = \overline{A} ∩ \overline{B} A∪B=A∩B
A ∩ B ‾ = A ‾ ∪ B ‾ \overline{A ∩ B} = \overline{A} ∪ \overline{B} A∩B=A∪B
常用结论:
A A ‾ = Φ A\overline{A} = Φ AA=Φ; A ∪ A ‾ = Ω A∪\overline{A} = Ω A∪A=Ω;
A ∪ B = A + B − A B = ( A − B ) + ( B − A ) + A B A ∪ B = A+ B − AB = (A − B) + (B − A) + AB A∪B=A+B−AB=(A−B)+(B−A)+AB
1.2 频率与概率
频率
定义:在相同条件下,进行n次试验,在这n次试验中,事件A发生的次数,称为事件A发生的频数,比值:f = 频数/试验次数,称为事件A发生的频率。
基本性质:
(1)0 <= f <= 1 ;
(2)f(Ω) = 1;
(3)两两互不相融事件的可列可加性。
稳定性:当试验重复次数很大时,频率趋于稳定,可以用来表征事件A发生可能性的大小。
概率
定义: 设E是随机试验,样本空间为Ω,对于E的每一个事件A赋予一个实数,记为P(A),称为A的概率。
性质:
(1)非负性 0 =< P(A) <= 1;
(2)正则性 P(Ω) = 1;
(3)可列可加性 若有互不相容的事件: A 1 , A 2 , A 3 , . . . A_1, A_2, A_3, ... A1,A2,A3,...,
\quad\quad 则 P ( ∪ A j ) = ∑ P ( A j ) P(∪A_j) = ∑ P(A_j) P(∪Aj)=∑P(Aj)
1.3 等可能概型(古典概型)
设E是一个试验,满足:(1)只有有限多个样本点;(2)每个样本点发生的可能性相同(等可能性)。
典型例子:抛硬币
长期实践的发现:“概率很小的事件在一次试验中几乎是不发生”(称之为实际推理原理)
排列
排列:从n个不同元素中,任取m(m ≤ n,m与n均为自然数)个元素按照一定的顺序排成一列,称为从n个不同元素中取出m个元素的一个排列。
排列数: A n m = n ( n − 1 ) ( n − 2 ) … … ( n − m + 1 ) = n ! ( n − m ) ! A_n^m = n(n-1)(n-2)……(n-m+1) = {n!\over(n-m)!} Anm=n(n−1)(n−2)……(n−m+1)=(n−m)!n!
组合
组合:从n个不同元素中,任取m(m≤n)个元素并成一组,叫做从n个不同元素中取出m个元素的一个组合。
组合数: C n m = A ( n , m ) m ! C_n^m = {A(n,m) \over m!} Cnm=m!A(n,m)
公式:
C n m = C n n − m C_n^m = C_n^{n-m} Cnm=Cnn−m
C n m + C n m − 1 = C n + 1 m C_n^m + C_n^{m-1} = C_{n+1}^m Cnm+Cnm−1=Cn+1m
C n 0 + C n 1 + . . . + C n n = 2 n = ( 1 + 1 ) n C_n^0 + C_n^1 + ... + C_n^n = 2^n = (1 + 1)^n Cn0+Cn1+...+Cnn=2n=(1+1)n
例1:
袋子中有a个黑球,b个白球,先一只只地摸出来,求:第k次摸到黑球的概率(1<= k <= a+b)
解法1:(排列)
思路:
样本空间为a+b个球的全排列,有利场合为第k个球确定为黑球,有a种可能,然后剩下a+b-1个球随机排列。
样本空间:(a+b)!
有利场合:a×(a+b-1)!
故:
P = a × ( a + b − 1 ) ! ( a + b ) ! = a a + b P = {a×(a+b-1)! \over (a+b)!} = {a \over a+b} P=(a+b)!a×(a+b−1)!=a+ba
解法2:(组合)
思路:
样本空间为从a+b个格子中选取a个放置黑球,其余一定放白球,故为 C a + b a C^a_{a+b} Ca+ba;有利场合为第k个确定放置黑球,从剩下a+b-1个格子中选取a-1个格子放置剩下的黑球,其余放白球,故为 C a + b − 1 a − 1 C^{a-1}_{a+b-1} Ca+b−1a−1。
样本空间: C a + b a C^a_{a+b} Ca+ba
有利场合: C a + b − 1 a − 1 C^{a-1}_{a+b-1} Ca+b−1a−1
故:
P = C a + b − 1 a − 1 C a + b a = a a + b P = {C^{a-1}_{a+b-1} \over C^a_{a+b}} = {a \over a+b} P=Ca+baCa+b−1a−1=a+ba
PS:这个例子就是抽签模型
例2:
设有n个球,每个都可以以同样的概率 1 n 1\over n n1落到N个格子的每一个格子中(N>=n),求:
(1)某指定的n个格子中各有一个球的概率P(A);
(2)任何n个格子中各有一个球的概率P(B);
解:
样本空间: N n N^n Nn
P ( A ) = n ! N n P(A) = {n! \over N^n} P(A)=Nnn!
P ( A ) = C N n    ⋅    n ! N n = N ! N n    ⋅    ( N − n ) ! P(A) = {C^n_N \; · \; n! \over N^n} = {N! \over N^n \; · \; (N-n)! } P(A)=NnCNn⋅n!=Nn⋅(N−n)!N!
PS:这个模型可用于计算具有相同生日的人的概率
1.4 条件概率
(1)条件概率:
设有两个事件A和B, P ( A ) ≠ 0 P(A)\neq0 P(A)̸=0,在已知A发生的条件下B发生的概率记为: P ( B ∣ A ) = P ( A B ) P ( A ) P(B|A) = {P(AB) \over P(A)} P(B∣A)=P(A)P(AB);满足概率的三个基本性质。
乘法公式: P ( A B ) = P ( A ) P ( B ∣ A ) P(AB) = P(A)P(B|A) P(AB)=P(A)P(B∣A)
(2)全概率公式:
设 B 1 , . . . , B i , . . . , B n B1, ... ,Bi, ... , Bn B1,...,Bi,...,Bn是 Ω \Omega Ω的一个划分(完备事件组), B 1 ⋃ B 2 ⋃ . . . ⋃ B n = Ω , B i ⋂ B j = ∅ , i ≠ j , P ( B i ) > 0 B_1 \bigcup B_2 \bigcup ... \bigcup B_n = \Omega, B_i \bigcap B_j = \emptyset, i \neq j, P(B_i) > 0 B1⋃B2⋃...⋃Bn=Ω,Bi⋂Bj=∅,i̸=j,P(Bi)>0, 其中 i=1, 2, 3, …,得到:
全概率公式: P ( A ) = P ( A Ω ) = P ( A ⋂ ( B 1 ⋃ B 2 ⋃ . . . ⋃ B n ) ) = P ( A B 1 ⋃ A B 2 . . . ⋃ A B n ) = ∑ i = 1 n P ( A B i ) = ∑ i = 1 n P ( B i ) P ( A ∣ B i ) P(A) = P(A\Omega) = P(A\bigcap(B_1 \bigcup B_2 \bigcup ... \bigcup B_n)) = P(AB_1 \bigcup AB_2... \bigcup AB_n) = \sum_{i=1}^n {P(AB_i)} = \sum_{i=1}^n P(B_i)P(A|B_i) P(A)=P(AΩ)=P(A⋂(B1⋃B2⋃...⋃Bn))=P(AB1⋃AB2...⋃ABn)=∑i=1nP(ABi)=∑i=1nP(Bi)P(A∣Bi)
PS:把一个要求的事件( Ω \Omega Ω)分解成若干个互不相容的事件( B i B_i Bi)。
(3)贝叶斯公式:
贝叶斯公式: P ( B i ∣ A ) = P ( B i A ) P ( A ) = P ( B i ) P ( A ∣ B i ) ( P ( A ∣ B 1 ) + . . . + P ( A ∣ B i ) + . . . + P ( A ∣ B n ) ) = P ( B i ) P ( A ∣ B i ) ∑ i = 1 n P ( B i ) P ( A ∣ B i ) P(B_i|A) = {P(B_iA)\over P(A)} = {P(B_i)P(A|B_i) \over (P(A|B_1) + ... + P(A|B_i) + ...+ P(A|B_n))} = {P(B_i)P(A|B_i) \over \sum_{i=1}^n P(B_i)P(A|B_i)} P(Bi∣A)=P(A)P(BiA)=(P(A∣B1)+...+P(A∣Bi)+...+P(A∣Bn))P(Bi)P(A∣Bi)=∑i=1nP(Bi)P(A∣Bi)P(Bi)P(A∣Bi)
其中: P ( A ) > 0 , P ( B i ) > 0 P(A) > 0, P(B_i) > 0 P(A)>0,P(Bi)>0
PS: P ( B i ) P(B_i) P(Bi)是先验概率,在实际应用中是经验的总结、信息的归纳;
   \;\quad P ( B i ∣ A ) P(B_i|A) P(Bi∣A)是后验概率,表示在事件(A)发生后对各种原因 B i B_i Bi发生可能性的分析;
例:
用某检验法诊断肺癌,A:被检验者患有肺癌;B:检验诊断为阳性(患病);
已知: P ( B ∣ A ) = 0.95 , P ( B ‾ ∣ A ‾ ) = 0.90 , P ( A ) = 0.0004 P(B|A)=0.95,P(\overline{B}|\overline{A})=0.90,P(A) = 0.0004 P(B∣A)=0.95,P(B∣A)=0.90,P(A)=0.0004
求:P(A|B)
解:
P ( A ∣ B ) = P ( A ) P ( B ∣ A ) P ( A ) P ( B ∣ A ) + P ( A ‾ ) P ( B ∣ A ‾ ) = 0.0004 × 0.95 0.0004 × 0.95 + 0.9996 × 0.1 = 0.0038 P(A|B) = {P(A)P(B|A) \over P(A)P(B|A) + P(\overline A)P(B|\overline A)} = {0.0004×0.95 \over 0.0004×0.95 + 0.9996×0.1} = 0.0038 P(A∣B)=P(A)P(B∣A)+P(A)P(B∣A)P(A)P(B∣A)=0.0004×0.95+0.9996×0.10.0004×0.95=0.0038
1.5 独立性
独立性是概率论和数理统计中很重要的概念,很多情况需要满足独立性才适用,一般根据实践来确定事件之间是否相互独立。
定义:设A、B是随机试验E的两个事件,若 P(AB) = P(A)P(B), 则称AB事件相互独立,即A和B两个事件的发生互不影响。
定理1:若P(A) > 0 ,且 P(B|A) = P(B) 等价于 AB相互独立
定理2:若A、B相互独立,则其对立事件也相互独立
可以很自然的推广到n个事件的情况
例:
甲、乙两种产品独立生产,甲产品的次品率0.05,乙产品的次品率0.04,现从甲乙产品中各区一件:
(1)两件都是次品的概率P1;
(2)至少有一件是次品的概率P2;
(3)恰好有一件是次品的概率P3。
解:
设A事件为抽取甲为次品,B事件为抽取乙为次品
由于A、B相互独立,故:A, A ‾ \overline{A} A; A ‾ \overline{A} A,B; A ‾ \overline{A} A, B ‾ \overline{B} B;相互独立
(1) P 1 = P ( A B ) = P ( A ) ⋅ P ( B ) = 0.05 × 0.04 = 0.002 P1=P(AB)=P(A)·P(B)=0.05×0.04=0.002 P1=P(AB)=P(A)⋅P(B)=0.05×0.04=0.002
(2) P 2 = P ( A ⋃ B ) = 1 − P ( A ⋃ B ‾ ) = 1 − P ( A ‾ B ‾ ) = 1 − P ( A ‾ ) P ( B ‾ ) = 1 − 0.95 × 0.96 = 0.088 P2=P(A \bigcup B)=1-P(\overline{A\bigcup B})=1-P(\overline{A}\overline{B})=1-P(\overline{A})P(\overline{B})=1-0.95×0.96=0.088 P2=P(A⋃B)=1−P(A⋃B)=1−P(AB)=1−P(A)P(B)=1−0.95×0.96=0.088
(3) P 3 = P ( A B ‾ ⋃ A ‾ B ) = P ( A B ‾ ) + P ( A ‾ B ) = P ( A ) P ( B ‾ ) + P ( A ‾ ) P ( B ) = 0.86 P3=P(A\overline{B}\bigcup \overline{A}B)=P(A\overline{B})+P(\overline{A}B)=P(A)P( \overline{B})+P(\overline{A})P(B)=0.86 P3=P(AB⋃AB)=P(AB)+P(AB)=P(A)P(B)+P(A)P(B)=0.86
PS:独立性和互不相容性
(1)加法公式对应互不相容性;
(2)乘法公式对应独立性;
1.6 蒙特霍尔三门问题
游戏规则:
- 参赛者会看见三扇关闭的门,其中一扇的后面有一辆汽车,选中后面有车的那扇门就可以赢得该汽车,另两扇门后则各藏有一只山羊。
- 当参赛者选定了一扇门,但未去开启它的时候,知道门后情形的节目主持人会开启剩下两扇门的其中一扇,露出其中一只山羊。
- 主持人其后会问参赛者要不要换另一扇仍然关上的门。
概率求解(python实现):
import randomdef MontyHall(Dselect, Dchange):Dcar = random.randint(1,3)if Dselect == Dcar and Dchange == 0:return 1elif Dselect == Dcar and Dchange == 1:return 0elif Dselect != Dcar and Dchange == 0:return 0else:return 1# 不确定是否改变选择
def test1(N):win = 0for i in range(N):Dselect = random.randint(1,3)Dchange = random.randint(0,1)win = win + MontyHall(Dselect, Dchange)print(float(win)/float(N))# 确定不改变选择
def test2(N):win = 0for i in range(N):Dselect = random.randint(1,3)Dchange = 0win = win + MontyHall(Dselect, Dchange)print(float(win)/float(N))# 确定改变选择
def test3(N):win = 0for i in range(N):Dselect = random.randint(1,3)Dchange = 1win = win + MontyHall(Dselect, Dchange)print(float(win)/float(N))N = 10000
print("不确定是否改变选择概率:")
test1(N)
print("确定不改变选择概率:")
test2(N)
print("确定改变选择概率:")
test3(N)
运行结果:
不确定是否改变选择概率:
0.4939
确定不改变选择概率:
0.3307
确定改变选择概率:
0.6618
1.7 蒙特卡罗方法
- 蒙特卡罗方法,或称计算机随机模拟方法,是一种基于“随机数”的计算方法。
- 使用随机数(通常是伪随机数)来解决计算问题的方法。
- 蒙特卡罗方法在金融工程学,宏观经济学,计算物理学等领域应用广泛。
# 计算$\pi$的蒙特卡洛方法
import randomn=1000000
k=0
for i in range(n):x=random. uniform(-1,1)y=random. uniform(-1,1)if x**2+y**2<1:k=k+1
print(4* float(k)/float(n))
运行结果:
3.142032