目录
一、构建方法
二、函数重要点注释
一、构建方法
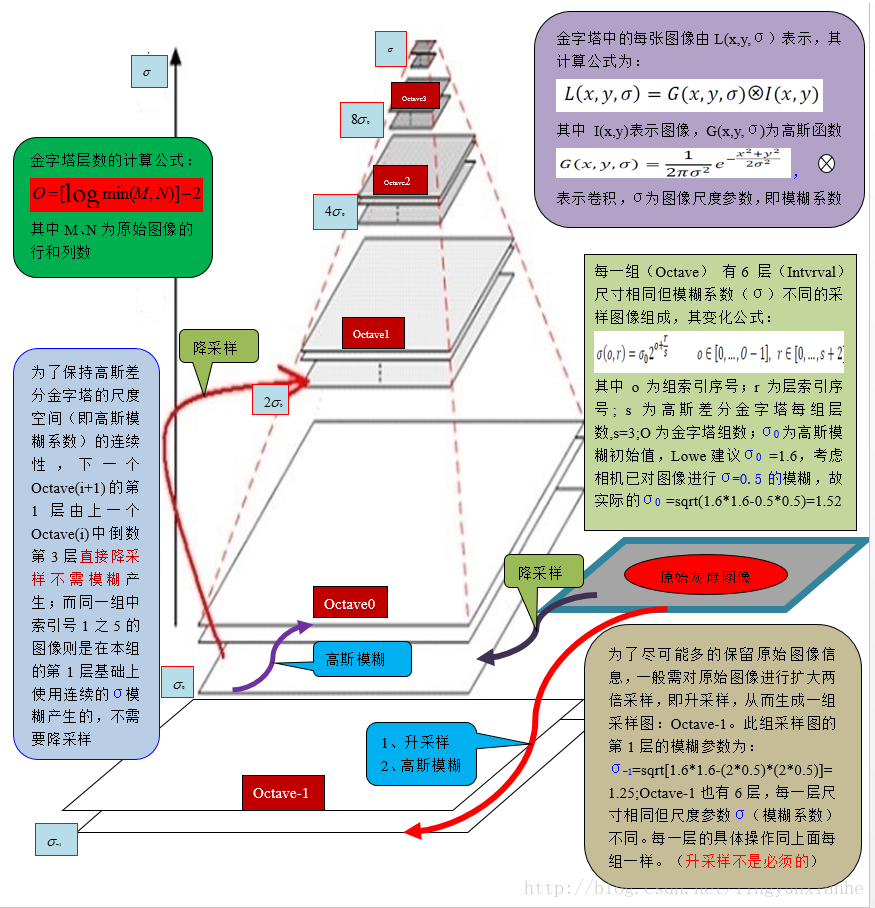
高斯金字塔每层图像的尺度为:。理论上金字塔每层图像可以从原图做
的高斯滤波得到。但是实际操作中,每组的第一张影像(除第一组)是上一组倒数第三张影像降采样得到,其他影像是对前一张图像做一定大小的高斯滤波得到,而不是直接从原图获取。
因此,需要求取每组内影像间的高斯平滑尺度。假设前一张影像尺度为,那么下一张尺度应该为
。
到
有公式:
。
即为从前一张图层到当前图层所需的高斯滤波尺度。
和
可根据金字塔层数求得。
对于每组的相同层影像,其相同。
二、函数重要点注释
void SIFT_Impl::buildGaussianPyramid( const Mat& base, std::vector<Mat>& pyr, int nOctaves ) const
{CV_TRACE_FUNCTION();/** 存储从前一张影像到当前影像所做的高斯滤波尺度,* 对于每一组,大小都一样*/ std::vector<double> sig(nOctaveLayers + 3);pyr.resize(nOctaves*(nOctaveLayers + 3));// precompute Gaussian sigmas using the following formula:// \sigma_{total}^2 = \sigma_{i}^2 + \sigma_{i-1}^2sig[0] = sigma;double k = std::pow( 2., 1. / nOctaveLayers );for( int i = 1; i < nOctaveLayers + 3; i++ ){/** sig_prev:前一张影像的空间尺度* sig_total:当前影像的空间尺度* sig[i]:前一张影像到当前影像,需要做的高斯滤波大小*/ double sig_prev = std::pow(k, (double)(i-1))*sigma;double sig_total = sig_prev*k;sig[i] = std::sqrt(sig_total*sig_total - sig_prev*sig_prev);}/** 构建高斯金字塔*/for( int o = 0; o < nOctaves; o++ ){for( int i = 0; i < nOctaveLayers + 3; i++ ){Mat& dst = pyr[o*(nOctaveLayers + 3) + i];/** 如果是金字塔的第一张影像,* 使用图像预处理步骤获得的结果* 如或是其他组的第一张影像,* 使用上一组的倒数第三张影像降采样* 如果不是每组的第一张影像,* 进行高斯滤波*/if( o == 0 && i == 0 )dst = base;// base of new octave is halved image from end of previous octaveelse if( i == 0 ){const Mat& src = pyr[(o-1)*(nOctaveLayers + 3) + nOctaveLayers];resize(src, dst, Size(src.cols/2, src.rows/2),0, 0, INTER_NEAREST);}else{const Mat& src = pyr[o*(nOctaveLayers + 3) + i-1];GaussianBlur(src, dst, Size(), sig[i], sig[i]);}}}
}