利用IIS发布网站
IIS是缩写 ,全称 Internet Information Services ( IIS,互联网信息服务 ) ,是由微软公司提供的基于运行Microsoft Windows的互联网基本服务。 IIS是指World Wide Web server服务,IIS是一种Web(网页)服务组件,专业的说,IIS可以赋予一部主机电脑一组以上的IP地址,而且还可以有一个以上的域名作为Web网站。
说白了就是把自己的电脑当成一个服务器,然后发布,这样就可以通过浏览器随时访问你的项目了。
1、打开IIS服务
路径:控制面板->程序->启用或关闭windows功能->勾选IIS 点击确定



2、打开管理工具


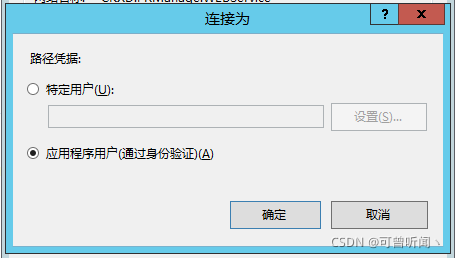
3、添加站点
点击确定

4、修改默认打开页面
双击网站

将你项目的默认文档修改成如下几个名称,或者自己再添加一个自己项目的文件名称

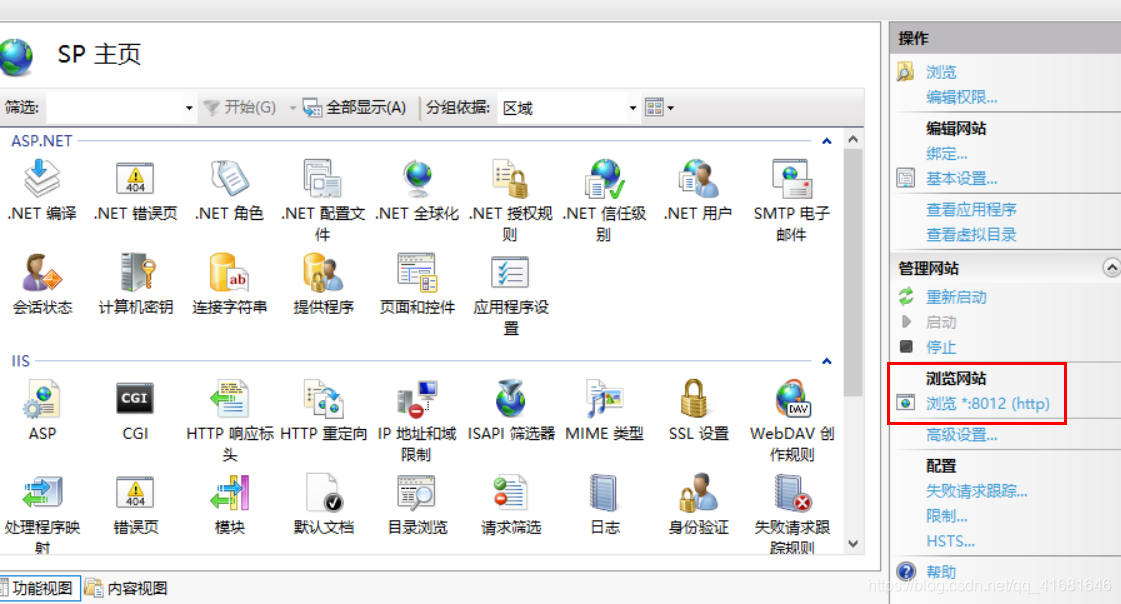
5、浏览网站
返回自己的网站主页,点击浏览