导读:惯性释放是允许对完全无约束的结构进行静力分析。通常我们做线性静力分析需要保证结构没有刚**移,否则求解器没有办法计算。但是很多分析,例如飞机在飞行时,轮船在航行(物体整体具有加速度)时,要想计算结构上的应力分布,需要采用惯性释放(inertia relief),在结构上施加一个虚假的约束反力来保证结构上合力的平衡。
简单地说就是用结构的惯性(质量)力来平衡外力。尽管结构没有约束,分析时仍假设其处于一种“静态”的平衡状态。采用惯性释放功能进行静力分析时,只需要对一个节点进行6个自由度的约束(虚支座)。
针对该支座,程序首先计算在外力作用下每个节点在每个方向上的加速度,然后将加速度转化为惯性力反向施加到每个节点上,由此构造一个平衡的力系(支座反力等于零)。求解得到的位移描述所有节点相对于该支座的相对运动。本文采用不同软件进行惯性释放分析以及详细流程的操作演示。
一、分析模型
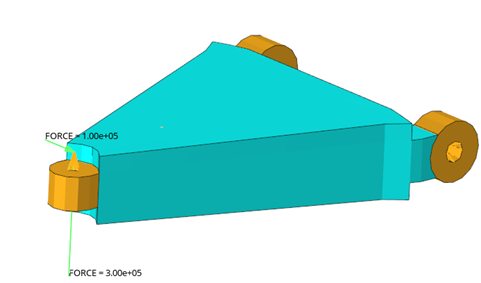
1、分析模型的建立,分析模型包括控制臂及中心连接单元rbe2等,在转向节球铰处受到Fx=1e5N,Fz=3e5N载荷。
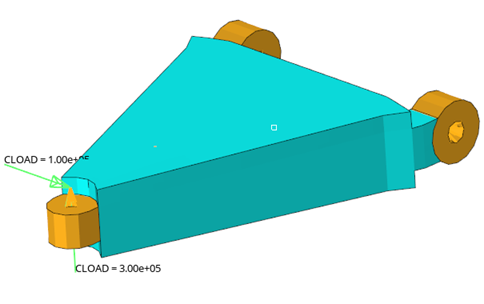
图1 某控制臂模型
二、采用abaqus进行控制臂的惯性释放分析
1、载荷设置

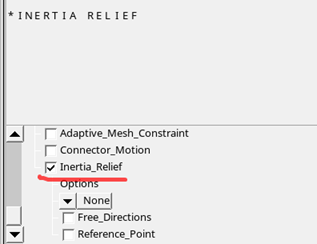
2、边界设置,定义惯性释放,操作如下:

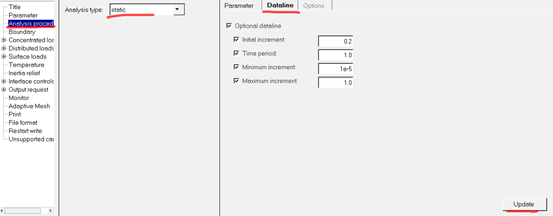
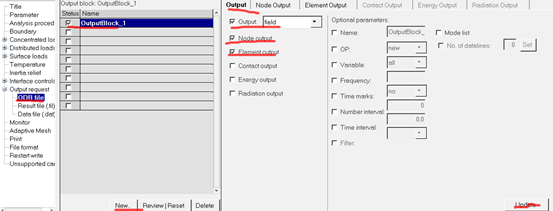
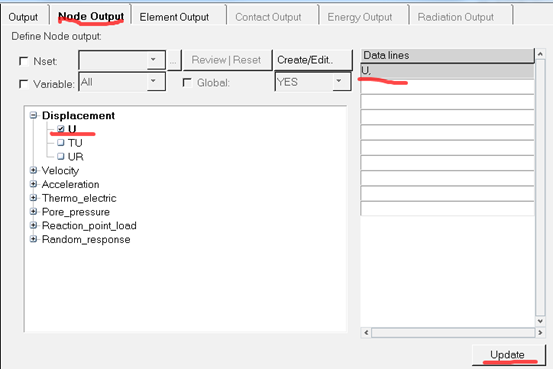
3、工况设置,包括定义分析类型及结果输出,操作如下:
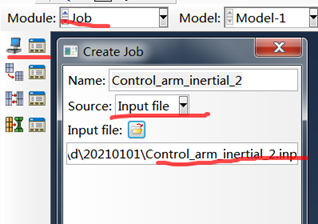
4、导出INP,并提交计算,可以采用bat批处理,或Abaqus中的job提交等

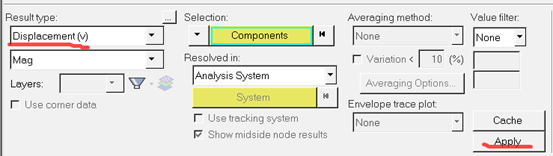
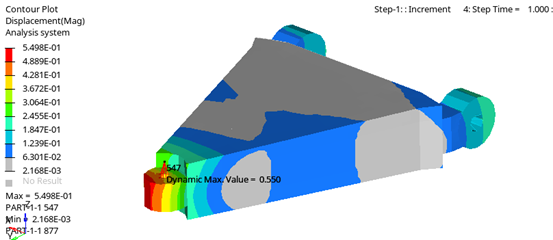
5、结果读取,包括位移及应力等
-
位移读取,加载点位移为0.5498mm
-
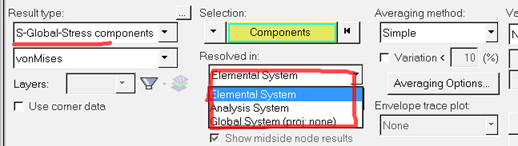
Mises应力读取,具体读取方法和注意细节如下:
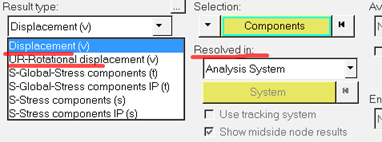
(1)Result Type中带v后缀的表示结果类型为矢量(vector)形式,如位移、速度和加速度等,如结果中的Displacement(v)和UR-Rotational displacement(v),由于是矢量可以选择在分析坐标系或全局坐标下读取。
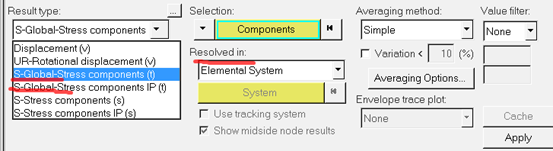
(2)带t后缀的表示结果类型为张量(tensor)形式,如应力张量、应变张量等;张量结果被转换成全局坐标系下,主要是在OBD中使用标量结果和变换矩阵,即结果类型中标有Global的,如S-Global-Stress components(t)和S-Global-Stress components IP(t),该结果可以在单元坐标系、分析坐标系或全局坐标系下读取。
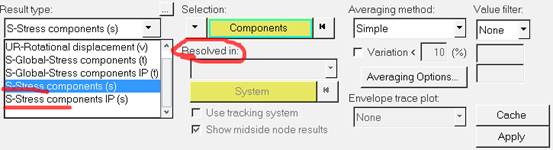
(3)带s后缀的表示结果类型为标量(scalar)形式,分量和不变量直接从ODB文件中读取;由于是标量形式,结果读取形式无法选择,通常是材料或单元局部坐标系下。
(4)带c后缀的表示结果类型为复数(comples)形式;
(5)带IP(Intergration points)后缀的表示结果在积分点结果;
(6)不带IP(Intergration points)后缀的表示结果依赖于输出请求;
点击完整阅读全文
基于ABAQUS和Optistruct汽车结构惯性释放分析详解