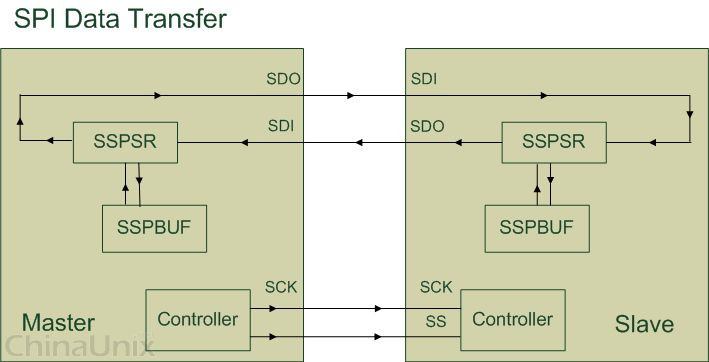
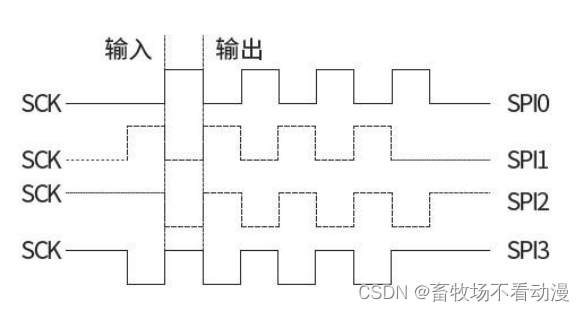
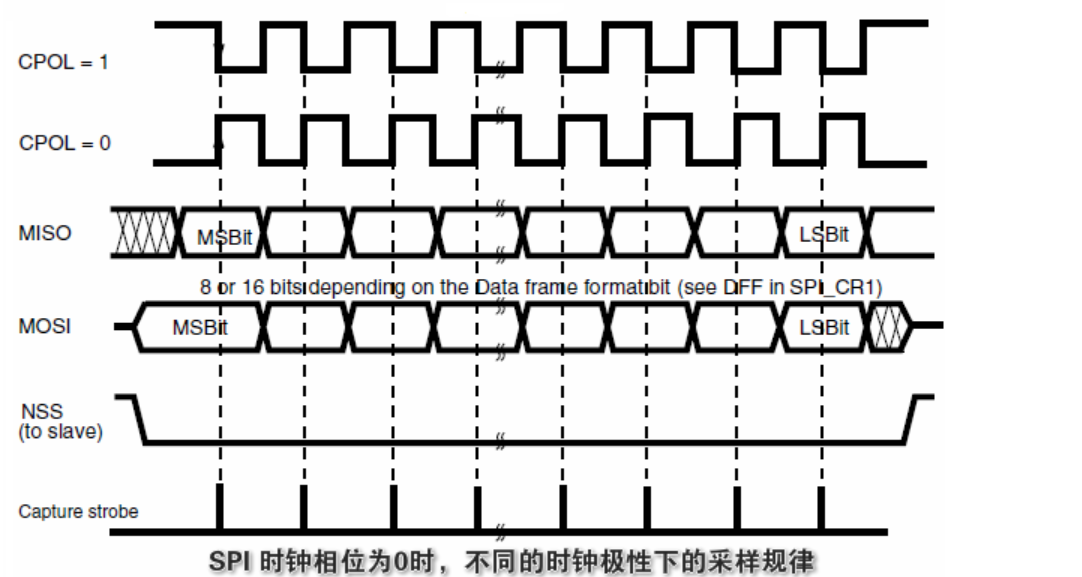
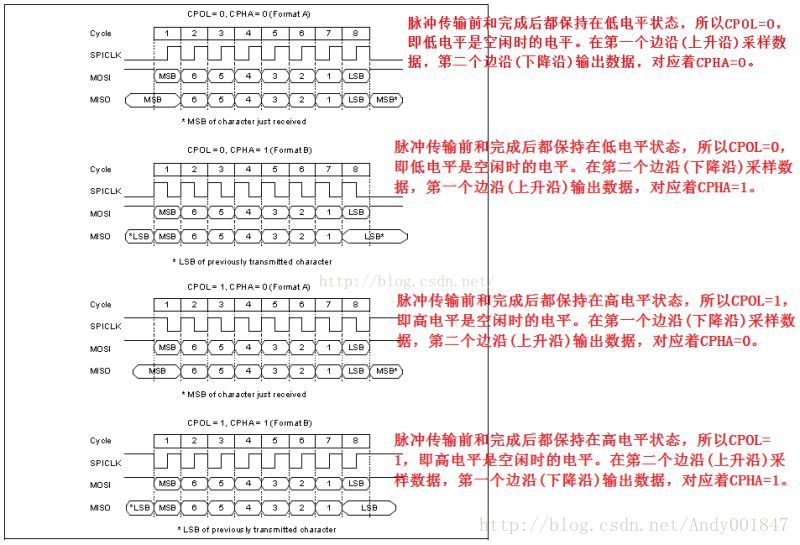
在工作中偶尔会遇到SPI不够用的情况,而我们又要去使用SPI通信协议,此时就需要我们自己去模拟SPI通信协议。我们知道SPI通信协议有四种模式,它们分别如下所示:
下面是我基于ATSAM4SD16B芯片在Atmel Studio上用普通GPIO模拟的SPI通信协议的代码:
#include "ioport.h"
#include "pio.h"
#include "delay.h"
#include "SAM4S_FSA.h"
#include <assert.h>// Define 4 SPI pins
#define CS IOPORT_CREATE_PIN(PIOA, 8)
#define SCLK IOPORT_CREATE_PIN(PIOA, 7)
#define MOSI IOPORT_CREATE_PIN(PIOA, 23)
#define MISO IOPORT_CREATE_PIN(PIOA, 20)#define SPIDelay delay_us(1)// Define SPI communication mode
typedef enum SPIMode
{Mode_1, /* Clock Polarity is 0 and Clock Phase is 0 */Mode_2, /* Clock Polarity is 0 and Clock Phase is 1 */Mode_3, /* Clock Polarity is 1 and Clock Phase is 0 */Mode_4, /* Clock Polarity is 1 and Clock Phase is 1 */
}SPIMode;// Define SPI type
typedef enum SPIType
{SPIMaster,SPISlave,
}SPIType;// Define SPI attribute
typedef struct SpiStruct
{unsigned int ui_CS;unsigned int ui_SCLK;unsigned int ui_MOSI;unsigned int ui_MISO;SPIMode spiMode;SPIType spiType;
}Spi_t;// Function prototypes
void v_SPIInitSimulate(Spi_t* p_Spi);
void v_CSIsEnableSimulate(Spi_t* p_Spi, int i_IsEnable);
void v_SPIWriteSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength);
void v_SPIReadSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength);// Define SPI pins
Spi_t Spi_0 =
{.ui_CS = CS,.ui_SCLK = SCLK,.ui_MOSI = MOSI,.ui_MISO = MISO,.spiMode = Mode_1,.spiType = SPIMaster,
};/*
Brief: SPI protocol initiate
Input: p_Spi, which spi use
Output: None
Return: None
Author: Andy Lai
*/
void v_SPIInitSimulate(Spi_t* p_Spi)
{assert(p_Spi != NULL);if(p_Spi->spiMode == SPIMaster){ioport_set_pin_dir(p_Spi->ui_CS, IOPORT_DIR_OUTPUT);ioport_set_pin_dir(p_Spi->ui_SCLK, IOPORT_DIR_OUTPUT);ioport_set_pin_dir(p_Spi->ui_MOSI, IOPORT_DIR_OUTPUT);ioport_set_pin_dir(p_Spi->ui_MISO, IOPORT_DIR_INPUT);}else{ioport_set_pin_dir(p_Spi->ui_CS, IOPORT_DIR_INPUT);ioport_set_pin_dir(p_Spi->ui_SCLK, IOPORT_DIR_INPUT);ioport_set_pin_dir(p_Spi->ui_MOSI, IOPORT_DIR_INPUT);ioport_set_pin_dir(p_Spi->ui_MISO, IOPORT_DIR_OUTPUT);}pio_set_pin_high(p_Spi->ui_CS);switch(p_Spi->spiMode){case Mode_1:case Mode_2:pio_set_pin_low(p_Spi->ui_SCLK);break;case Mode_3:case Mode_4:pio_set_pin_high(p_Spi->ui_SCLK);break;}
}/*
Brief: CS low level signal enable and high level signal disable
Input: (1)p_Spi, which spi use(2)i_IsEnable, Chip select(Slave select) enable flag
Output: None
Return: None
Author: Andy Lai
*/
void v_CSIsEnableSimulate(Spi_t* p_Spi, int i_IsEnable)
{assert(p_Spi != NULL);if(i_IsEnable){pio_set_pin_low(p_Spi->ui_CS);}else{pio_set_pin_high(p_Spi->ui_CS);}
}/*
Brief: Use SPI to write a byte data
Input: (1)p_Spi, which spi use(2)uc_Bt, write byte data
Output: None
Return: None
Author: Andy Lai
*/
static void v_SPIWriteByte(Spi_t* p_Spi, unsigned char uc_Bt)
{int i = 0;assert(p_Spi != NULL);switch(p_Spi->spiMode){case Mode_1: /* Clock Polarity is 0 and Clock Phase is 0 */pio_set_pin_low(p_Spi->ui_SCLK);for(i = 7; i >= 0; i--){pio_set_pin_low(p_Spi->ui_SCLK);SPIDelay;pio_set_pin_high(p_Spi->ui_SCLK);if(uc_Bt & (1 << i)){pio_set_pin_high(p_Spi->ui_MOSI);}else{pio_set_pin_low(p_Spi->ui_MOSI);}SPIDelay;}pio_set_pin_low(p_Spi->ui_SCLK);break;case Mode_2: /* Clock Polarity is 0 and Clock Phase is 1 */pio_set_pin_low(p_Spi->ui_SCLK);for(i = 7; i >= 0; i--){pio_set_pin_high(p_Spi->ui_SCLK);if(uc_Bt & (1 << i)){pio_set_pin_high(p_Spi->ui_MOSI);}else{pio_set_pin_low(p_Spi->ui_MOSI);}SPIDelay;pio_set_pin_low(p_Spi->ui_SCLK);SPIDelay;}pio_set_pin_low(p_Spi->ui_SCLK);break;case Mode_3: /* Clock Polarity is 1 and Clock Phase is 0 */pio_set_pin_high(p_Spi->ui_SCLK);for(i = 7; i >= 0; i--){pio_set_pin_high(p_Spi->ui_SCLK);if(uc_Bt & (1 << i)){pio_set_pin_high(p_Spi->ui_MOSI);}else{pio_set_pin_low(p_Spi->ui_MOSI);}SPIDelay;pio_set_pin_low(p_Spi->ui_SCLK);SPIDelay;}pio_set_pin_high(p_Spi->ui_SCLK);break;case Mode_4: /* Clock Polarity is 1 and Clock Phase is 1 */pio_set_pin_high(p_Spi->ui_SCLK);for(i = 7; i >= 0; i--){pio_set_pin_low(p_Spi->ui_SCLK);if(uc_Bt & (1 << i)){pio_set_pin_high(p_Spi->ui_MOSI);}else{pio_set_pin_low(p_Spi->ui_MOSI);}SPIDelay;pio_set_pin_high(p_Spi->ui_SCLK);SPIDelay;}pio_set_pin_high(p_Spi->ui_SCLK);break;default:break;}
}/*
Brief: Use SPI protocol to write data
Input: (1)p_Spi, which spi use(2)puc_Data, write data string(3)i_DataLength, write data length
Output: None
Return: None
Author: Andy Lai
*/
void v_SPIWriteSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength)
{int i = 0;assert(p_Spi != NULL);assert(puc_Data != NULL);assert(i_DataLength > 0);v_CSIsEnableSimulate(p_Spi, 1);delay_us(8);// Write datafor(i = 0; i < i_DataLength; i++){v_SPIWriteByte(p_Spi, puc_Data[i]);}delay_us(8);v_CSIsEnableSimulate(p_Spi, 0);
}/*
Brief: Read a byte data from SPI
Input: p_Spi, which spi use
Output: None
Return: Read data
Author: Andy Lai
*/
static unsigned char uc_SPIReadByte(Spi_t* p_Spi)
{int i = 0;unsigned char uc_ReadData = 0;assert(p_Spi != NULL);switch(p_Spi->spiMode){case Mode_1: /* Clock Polarity is 0 and Clock Phase is 0 */pio_set_pin_low(p_Spi->ui_SCLK);for(i = 0; i < 8; i++){pio_set_pin_low(p_Spi->ui_SCLK);SPIDelay;pio_set_pin_high(p_Spi->ui_SCLK);uc_ReadData = uc_ReadData << 1;uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO);SPIDelay;}pio_set_pin_low(p_Spi->ui_SCLK);break;case Mode_2: /* Clock Polarity is 0 and Clock Phase is 1 */pio_set_pin_low(p_Spi->ui_SCLK);for(i = 0; i < 8; i++){pio_set_pin_high(p_Spi->ui_SCLK);SPIDelay;pio_set_pin_low(p_Spi->ui_SCLK);uc_ReadData = uc_ReadData << 1;uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO);SPIDelay;}pio_set_pin_low(p_Spi->ui_SCLK);break;case Mode_3: /* Clock Polarity is 1 and Clock Phase is 0 */pio_set_pin_high(p_Spi->ui_SCLK);for(i = 0; i < 8; i++){pio_set_pin_high(p_Spi->ui_SCLK);SPIDelay;pio_set_pin_low(p_Spi->ui_SCLK);uc_ReadData = uc_ReadData << 1;uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO);SPIDelay;}pio_set_pin_high(p_Spi->ui_SCLK);break;case Mode_4: /* Clock Polarity is 1 and Clock Phase is 1 */pio_set_pin_high(p_Spi->ui_SCLK);for(i = 0; i < 8; i++){pio_set_pin_low(p_Spi->ui_SCLK);SPIDelay;pio_set_pin_high(p_Spi->ui_SCLK);uc_ReadData = uc_ReadData << 1;uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO);SPIDelay;}pio_set_pin_high(p_Spi->ui_SCLK);break;default:break;}return uc_ReadData;
}/*
Brief: Use SPI to read data
Input: (1)p_Spi, which SPI use; (2)i_DataLength, the length of data that need to read
Output: puc_Data, need to get data
Return: None
Author: Andy Lai
*/
void v_SPIReadSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength)
{int i = 0;assert(p_Spi != NULL);assert(i_DataLength > 0);v_CSIsEnableSimulate(p_Spi, 1);delay_us(8);// Read datafor(i = 0; i < i_DataLength; i++){puc_Data[i] = uc_SPIReadByte(p_Spi);}delay_us(8);v_CSIsEnableSimulate(p_Spi, 0);
}参考博客:http://blog.csdn.net/yangzheng_yz/article/details/50470577