如果感觉部分文章对你产生了很大的帮助,可以使用下面的支付宝链接进行捐助:You can buy me a coffee:)
可以去https://qr.alipay.com制作自己的支付二维码
Donate
article/2025/9/10 8:46:04
相关文章

细胞实例分割:DoNet: Deep De-overlapping Network for Cytology Instance Segmentation 论文阅读笔记
细胞实例分割:DoNet: Deep De-overlapping Network for Cytology Instance Segmentation 论文阅读笔记 一、Abstract二、引言三、相关工作细胞学实例分割遮挡实例分割 四、方法4.1 预览问题概述工作流程粗糙的 Mask 分割 4.2 解耦合和重组策略双路径区域分割模块 Du…

donet学习笔记7(数据库的增删改查.dataview的运用)
1.数据库前台设计:非常简单,建立一个表即可 create table person( pID varchar ( 10 ) primary key , personName varchar ( 20 ) not null , personSex varchar ( 2 ) ,) 2.前台设计: …

OpenCV学习笔记:KeyPoint和DMatch数据结构详解
近期事情太多了,课业也繁多,好久没更了,今天对OpenCV中经常用到的一些数据类型的结构进行一波分析,为自己做记录的同时也分享给大家。闲言少叙,开始操作。
一、KeyPoint 数据结构
angle //关键点的方向&#x…
The Center of Attention: Center-Keypoint Grouping via Attention for Multi-Person Pose Estimation
该论文发表于ICCV2021
本文是将Transformer应用于关键点分组的创新工作。实际上是自底向上方法中分组操作的优化,利用Transformer进行关键点分组,达到端到端训练与加快模型推理速度的效果。并且,在拥挤图像中,该方法能够拥有更好…

计算机视觉论文速递(六)GANet: A Keypoint-based Global Association Network for Lane Detection 基于关键点建模的全局关联网络
计算机视觉论文速递(六)GANet: A Keypoint-based Global Association Network for Lane Detection 基于关键点建模的全局关联网络 1. 摘要2. 方法动机3. 方法介绍3.1 车道线构建-全局关键点关联3.1.1关键点预测3.1.2 偏移量预测3.1.3 起始点采样 3.2 车道…

torchvision使用keypoint rcnn 进行人体关键点定位
系统:Windows 11
pytorch版本:1.11.0
torchvision版本:0.12.0
使用图片地址:vision/person1.jpg at main pytorch/vision GitHub
使用代码: import torch
import torchvision.transforms
from torchvision.model…

CenterNet: Keypoint Triplets for Object Detection
论文地址:https://arxiv.org/pdf/1904.08189.pdf 在本文中,作者将一个对象建模为一个单点,即其包围框的中心点。并使用关键点估计来找到中心点,并回归到所有其他对象属性,如大小、3D位置、方向,甚至姿势。C…

COCO数据集keypoint部分
COCO数据集总体格式如下:
{"info": {...},"licenses": [...],"images": [...],"annotation": [...],"categories": [...],
}coco数据集的使用:
from pycocotools.coco import COCO
import matplotl…
Rethinking Keypoint Representations: Modeling Keypoints and Poses as Objects for Multi-Person Human
该论文发表于ECCV2022
题目:重新思考关键点表征方法:将关键点和人体姿态作为目标建模以进行多人姿态估计
Abstract
In keypoint estimation tasks such as human pose estimation,heatmap-based regression is the dominant approach despite possess…
![[1] A Keypoint-based Global Association Network for Lane Detection](https://img-blog.csdnimg.cn/e7796a74547a4a8eb9fd71f577bf4f04.png)
[1] A Keypoint-based Global Association Network for Lane Detection
A Keypoint-based Global Association Network for Lane Detection
0. 摘要
概括车道线检测方法: (1)基于Anchor定位的方法,自顶向下根据路线图把预设定的Anchor回归到车道线上。缺点是对复杂车道线不够灵活; &#…
cv::KeyPoint中response的介绍
1. Opencv中的KeyPoint类介绍
KeyPoint类的构造函数如下: KeyPoint(); KeyPoint(Point2f _pt, float _size, float _angle-1, float _response0, int _octave0, int _class_id-1); KeyPoint(float x, float y, float _size, float _angle-1, float _response0, int _octave0…
11种Anchor-free目标检测综述 -- Keypoint-based篇
点击上方“3D视觉工坊”,选择“星标” 干货第一时间送达 导读 anchor-free目标检测算法分为两种,一种是DenseBox为代表的Dense Prediction类型,另一种则是以CornerNet为代表的Keypoint-bsaed Detection类型,以检测目标关键点为主…
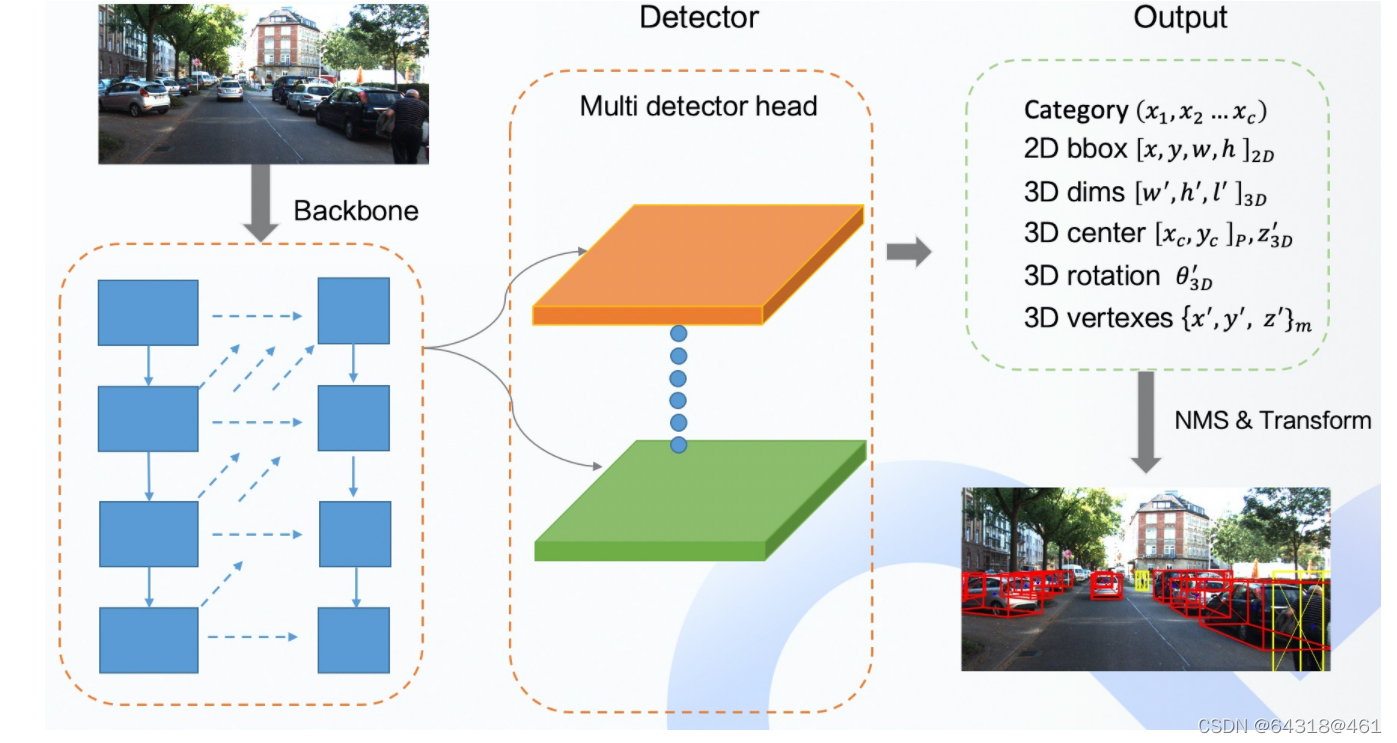
SMOKE: Single-Stage Monocular 3D Object Detection via Keypoint Estimation
动机:
in this paper that predicts a 3D bounding box for each detected object by combining a single keypoint estimate with regressed 3D variables. As a second contribution, we propose a multi-step disentangling approach for constructing the 3D b…
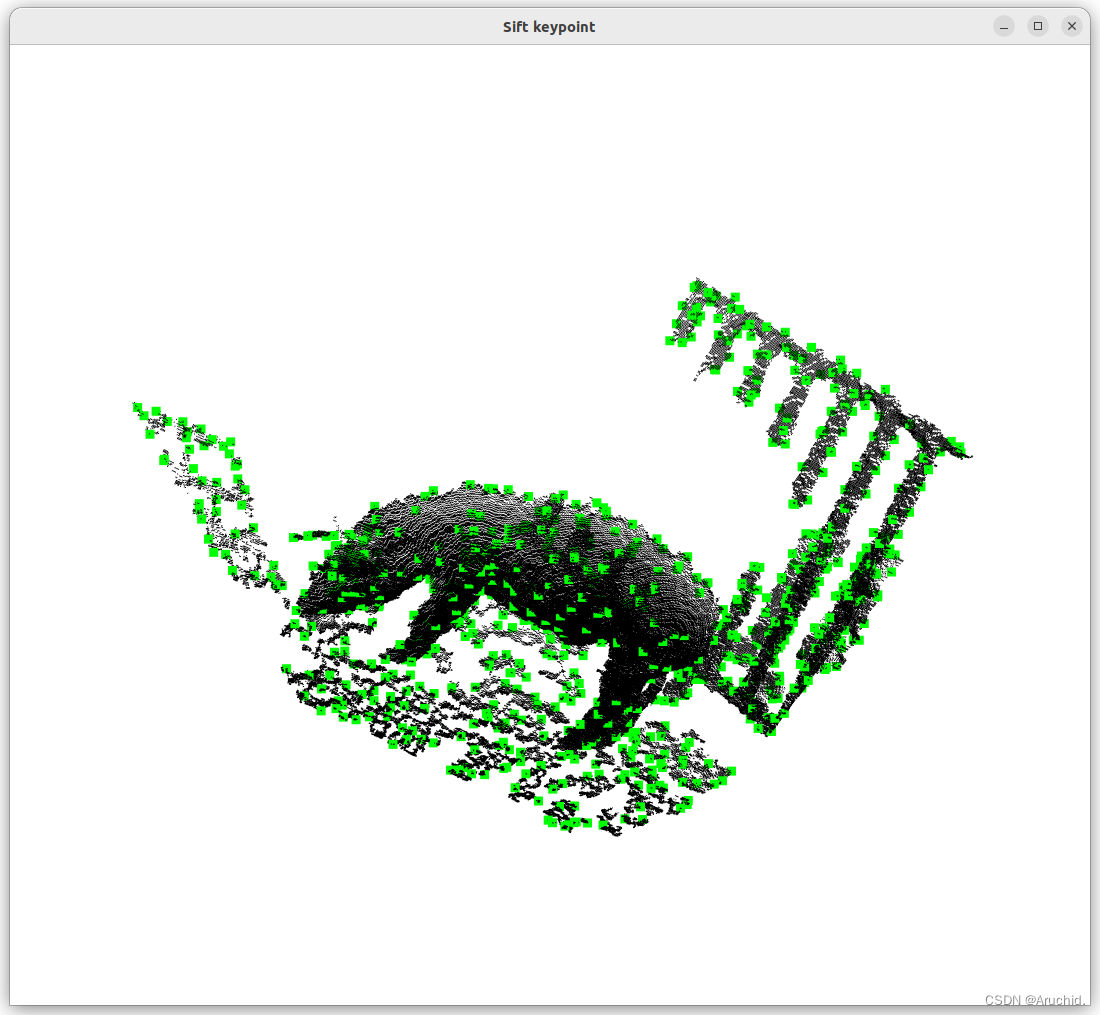
《PCL Docs 案例详解》KeyPoint——SIFT 关键点提取
SIFT 关键点提取
本节演示如何检测点云的SIFT 关键点。SIFT 即尺度不变特征变换(Scale-invariant feature transform,SIFT) ,最初用于图像处理领域的一种描述。这种描述具有尺度不变性,可以在图像中检测出关键点,是一种局部特征描述。
完整…

OpenCV中KeyPoint类
https://blog.csdn.net/u010821666/article/details/52883580
Opencv中KeyPoint类中的默认构造函数如下:
CV_WRAP KeyPoint() : pt(0,0), size(0), angle(-1), response(0), octave(0), class_id(-1) {} 现分析各项属性
pt(x,y):关键点的点坐标;
si…

Anchor-free目标检测综述 -- Keypoint-based篇
早期目标检测研究以anchor-based为主,设定初始anchor,预测anchor的修正值,分为two-stage目标检测与one-stage目标检测,分别以Faster R-CNN和SSD作为代表。后来,有研究者觉得初始anchor的设定对准确率的影响很大&#x…

Opencv中特征点Keypoint的解读(特征点与坐标的相互转换)
Opencv中特征点Keypoint的解读 特征点的生成特征点到坐标的转换坐标到特征点的转换 在我们学习特征点检测时,使用特征点检测器,比如ORB和SIFT生成特征点(FAST和SURF好像已经申请专利,较新版本可能用不了),通常生成的特征点形式是一…

COCO数据集Keypoint标注格式梳理和使用COCO-Annotator在自有数据集上进行标注
这里写自定义目录标题 COCO数据集Keypoint标注格式COCO数据集官网Keypoint Detection关键点检测统一数据格式Keypoint标注 使用COCO-Annotator标注自有数据集在Ubuntu 18.04上安装COCO-Annotator安装Docker和Docker-Compose安装COCO Annotator启动COCO Annotator使用COCO Annot…

OpenCV学习之KeyPoint
OpenCV中CV_EXPORTS类别KeyPoint与KeyPointsFilter头文件分析 用OpenCV一段时间了,说实话KeyPoint接触也算比较多,一直没有时间对其数据结构进行分析。今天打开源码对其keypoint.cpp文件进行简单分析一下:keypoint.cpp主要包含两个类KeyPoint…