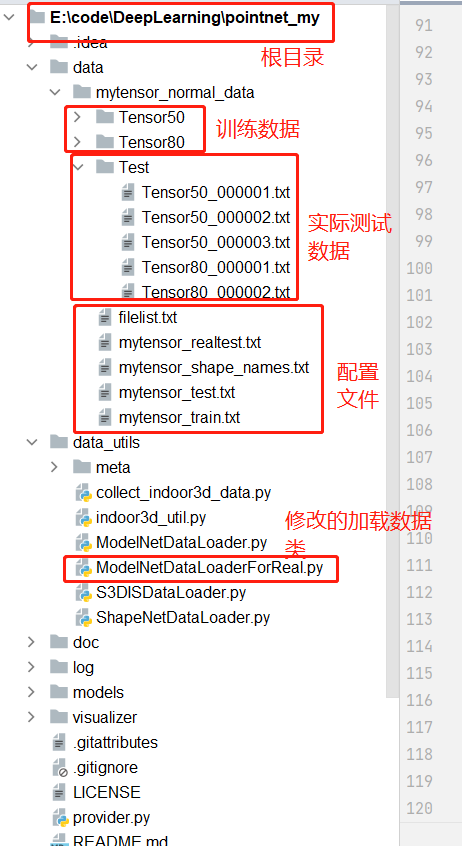
本文针对PointNet++强大的三维点云分类功能,详细讲解怎么训练自己的数据集,在此之前,需要确保已经能够跑通源码的训练和测试,如果没有,请参考PointNet++的源码运行。
数据放置
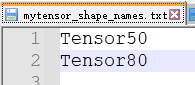
1.1. 在mytensor_shape_names.txt中配置自己的分类,以及分类名称:
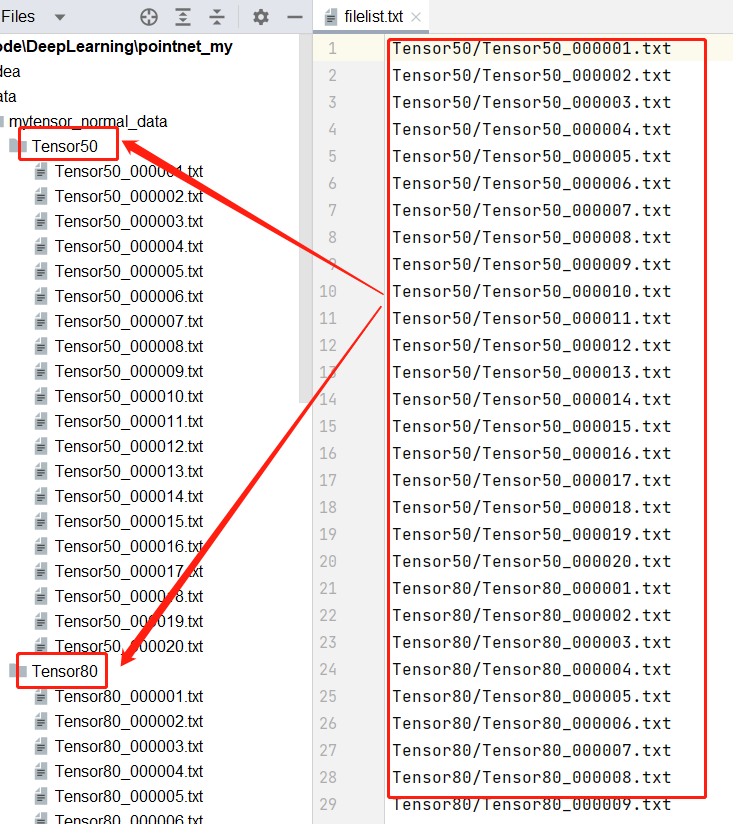
1.2. 在filelist.txt中填入对应的不同类别的文件夹名/数据文件名,这里的文件夹名最好跟自己的分类类别一致
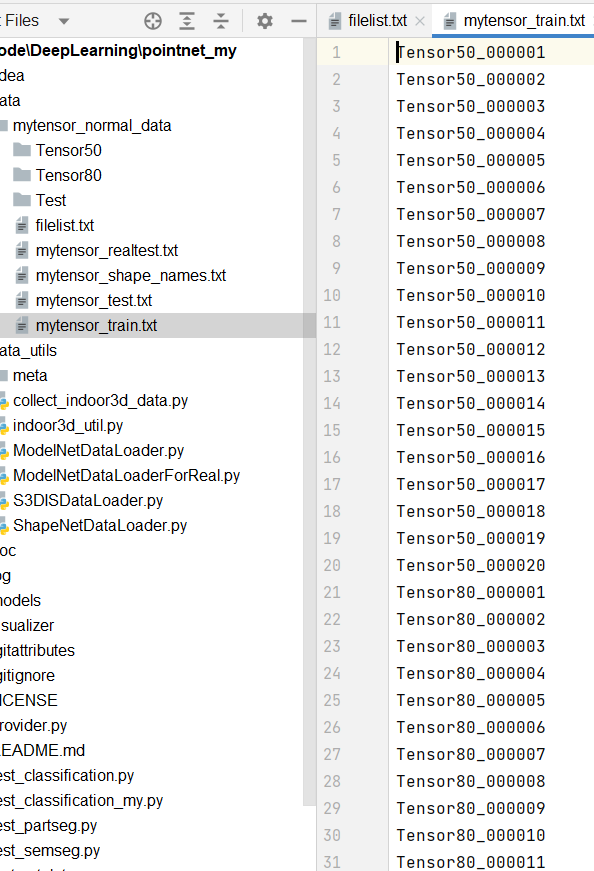
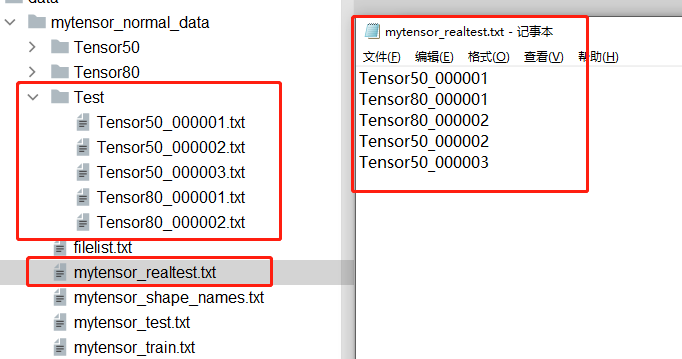
1.3. 然后在mytensor_train.txt和mytensor_test.txt中依次输入训练和测试的数据文件名称
我的训练集就是测试集,所以是一样的
1.4 实际的再次采集的测试数据
代码修改
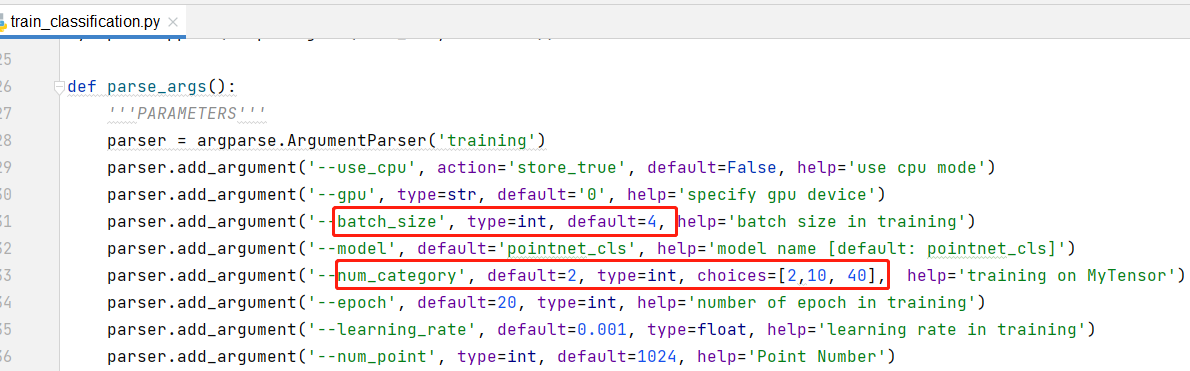
2.1 训练时的代码修改
主要修改batch_size,和类别数量
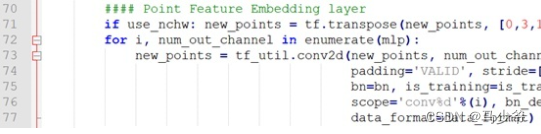
在数据加载模块中,将自己的配置文件放进去

然后就可以开始训练
2.2 测试时代码修改
测试时修改较多,主要是在数据加载类中,可直接查看代码
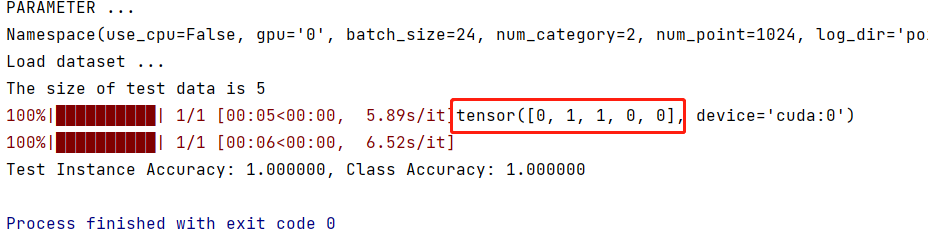
运行结果查看
查看自己的分类是否正确,可直接查看打印出来的pred_choice
4. 源码下载
可前往百度网盘下载,测试,有任何问题可以私信我
链接:https://pan.baidu.com/s/1iuqHQg_w6kq6JzmZjaIbaw
提取码:ng3h