简介
作者在先前的研究中提出了Pointnet,此论文是Pointnet的改进版Pointnet++。提出改进的理由是因为Pointnet无法很好地捕捉由度量空间引起的局部结构问题,由此限制了网络对精细场景的识别以及对复杂场景的泛化能力。
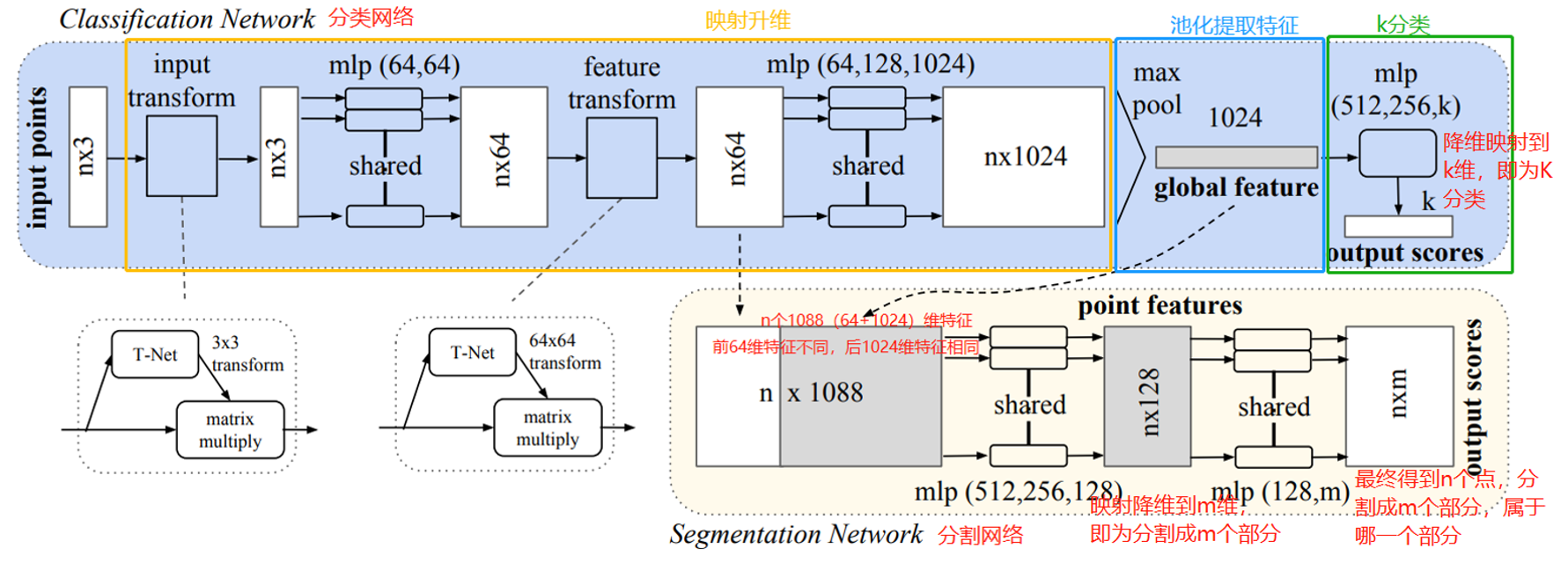
Pointnet的基本思想是对输入点云中的每一个点学习其对应的空间编码,之后再利用所有点的特征得到一个全局的点云特征。这里欠缺了对局部特征的提取及处理,比如说点云空间中临近点一般都具有相近的特征,同属于一个物体空间中的点的概率也很大,就好比二维图像中,同一个物体的像素值都相近一样。
再者现实场景中的点云往往是疏密不同的,而Pointnet是基于均匀采样的点云进行训练的,导致了其在实际场景点云中的准确率下降。
Pointnet++就上述提出了改进,解决了两个问题
1:如何对点云进行局部划分
2:如何对点云进行局部特征提取
上述两个问题其实是相关联的。
实现细节
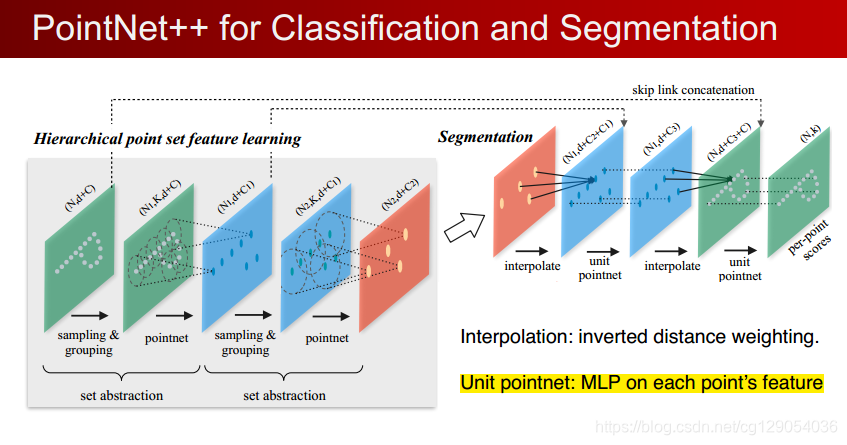
层级点云特征学习
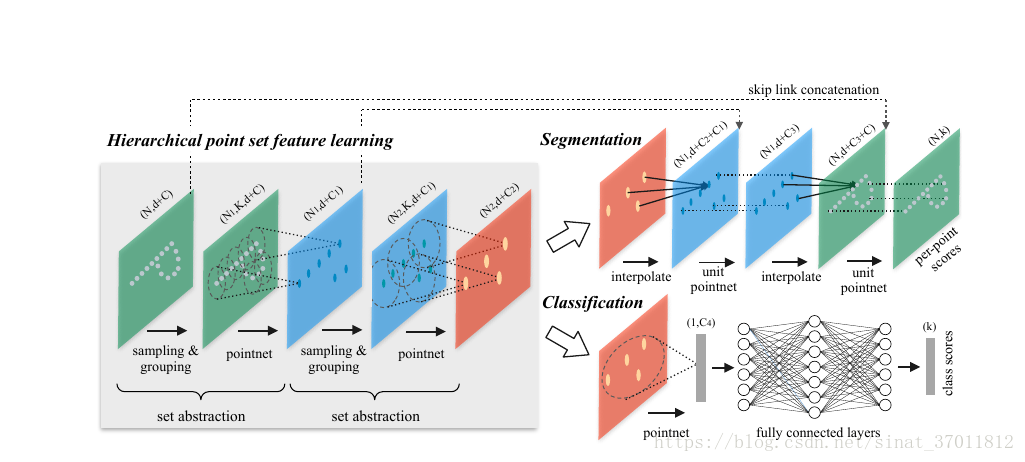
点集的特征提取由三部分组成,分别为Sampling layer、Grouping layer、Pointnet layer。
Sampling layer
采样层在输入点云中选择一系列点,由此定义出局部区域的中心。采样算法使用迭代最远点采样方法 iterative farthest point sampling(FPS)。
FPS: 先随机选择一个点,然后再选择离这个点最远的点作为起点,再继续迭代,直到选出需要的个数为止
相比随机采样,能更完整得通过区域中心点采样到全局点云
Grouping layer
目的是要构建局部区域,进而提取特征。思想就是利用临近点,并且论文中使用的是neighborhood ball,而不是KNN,是因为可以保证有一个fixed region scale,主要的指标还是距离distance。
Pointnet layer
在如何对点云进行局部特征提取的问题上,利用原有的Pointnet就可以很好的提取点云的特征,由此在Pointnet++中,原先的Pointnet网络就成为了Pointnet++网络中的子网络,层级迭代提取特征。
点云密度不均匀时的鲁棒特征学习
这里作者解决空间中点云的密度不均匀对特征学习带来的挑战。提出了两种grouping的方法,即如何提取不同尺度的局部patterns并按照局部点的密度去组合它们。称为密度自适应层
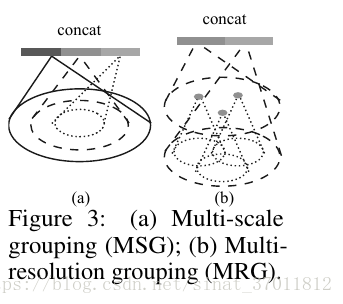
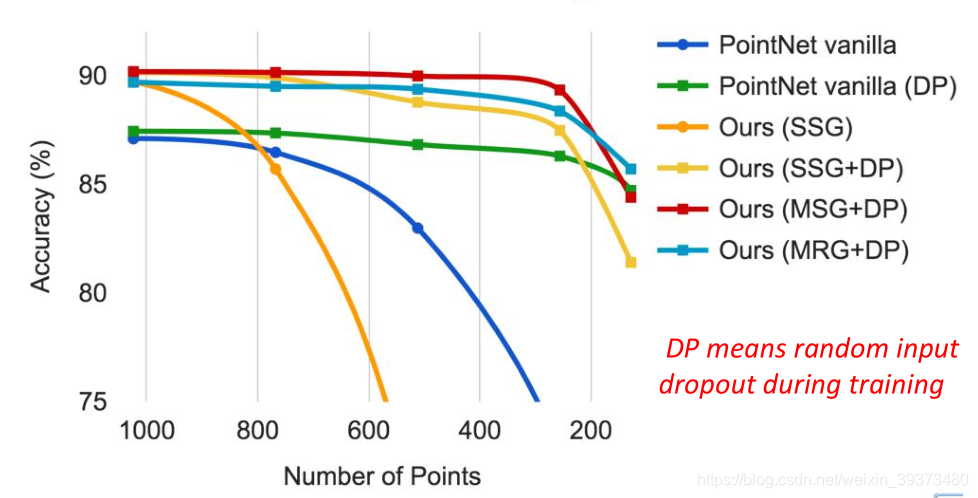
Multi-scale Grouping
简单而有效的方式,直接对不同密度的点云特征(通过Pointnet提取后的)进行组合
不同密度的点云是通过对输入点云进行不同概率的dropout得到的
问题是计算量比较大
Multi-resolution Grouping
分两部分,一部分直接用Pointnet从raw points上提取的特征,另一部分是对subregion使用 set abstraction得到的特征的集合。第一部分相当于是一个比较全局的部分,第二部分相当于是一个比较局部的部分,这里用两部分可以很好的控制局部区域的密度。当局部区域的密度比较小的时候,说明局部特征没有全局特征可靠,因此可以增加全局特征的权重。反之也是如此。就相当于权重可以在密度的变化之中可以被学习到。
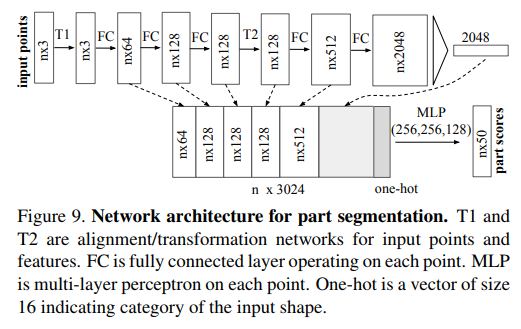
Segmentation 部分
在网络中输入不断被降采样而在segmentation中label都是针对原始点的,相当于需要做一个upsampling的动作。作者使用插值的方法再和之前的set abstraction 中的feature 做一个 concatenate,
inverse distance weighted average based on k nearest neighbors

结论
Pointnet++的结构在3D point clouds上取得了state of art的水平,解决了如何处理采样不均匀的问题,也考虑了空间中点与点之间的距离度量,通过层级结构利用局部区域信息学习特征,网络结构更有效更鲁棒
References
https://arxiv.org/abs/1706.02413
https://github.com/charlesq34/pointnet2
https://blog.csdn.net/sunfei05/article/details/80451808
https://www.cnblogs.com/lainey/p/8625141.html
https://blog.csdn.net/qq_15332903/article/details/80261951