鱼眼相机模型 (fisheye camera model)
- 模型介绍
- 等距投影
- 等立体角投影
- 正交投影
- 体视投影
- 线性投影
- Kannala-Brandt 模型
- 去畸变过程
- 投影过程
- 反投影过程
- 雅可比计算
之前总结了一下针孔相机的模型,然后得到了比较积极的回复(其实是我到处求人关注的,虽然截至到目前才三个人),所以就再接再励,乘胜追击(也没得办法,夸下的海口,跪着也要做完),继续总结其他相机模型。
模型介绍
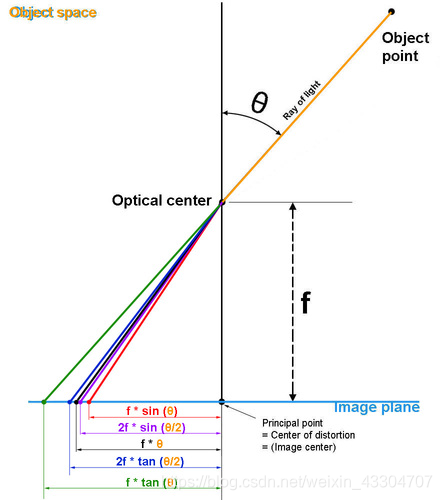
鱼眼相机相较于针孔相机来说,视野更广,但畸变也更加严重,因此普通的针孔模型已不适用。鱼眼镜头的基本构造如图所示,经过多个镜头的折射,最终到达成像单元上。文章中所有图片均来自于网络,非本人所绘。

一般情况下,可以通过控制光线的路径来设计各种各样的镜头类型,根据投影方式的不同,可以将这些镜头分为等距投影、等立体角投影、正交投影、体视投影以及线性投影。
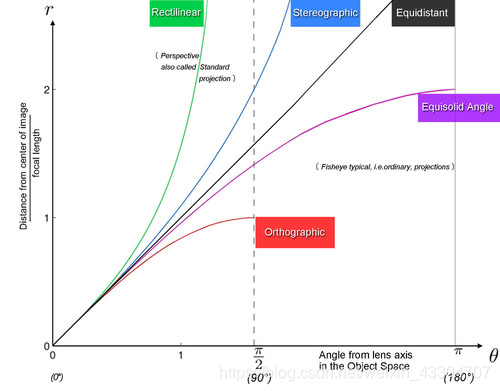
等距投影
r = f θ r=f \theta r=fθ
等立体角投影
r = 2 f s i n ( θ 2 ) r=2fsin({{\theta} \over {2}}) r=2fsin(2θ)
正交投影
r = f s i n ( θ ) r=fsin(\theta ) r=fsin(θ)
体视投影
r = 2 f t a n ( θ 2 ) r=2ftan({{\theta} \over {2}}) r=2ftan(2θ)
线性投影
r = f t a n ( θ ) r=ftan(\theta) r=ftan(θ)
Kannala-Brandt 模型
同针孔模型一样,鱼眼模型也有畸变,那么怎么来用数学鱼眼描述这种畸变呢?观察各种投影方式,发现他们都是一个关于入射角 θ \theta θ 的奇函数,因此鱼眼镜头的畸变也是对 θ \theta θ 的畸变,KB模型用只包含奇次项的多项式来描述畸变过程,其具体形式如下所示
θ d = θ + k 1 θ 3 + k 2 θ 5 + k 3 θ 7 + k 4 θ 9 \theta_d=\theta+k_1\theta^3+k_2\theta^5+k_3\theta^7+k_4\theta^9 θd=θ+k1θ3+k2θ5+k3θ7+k4θ9
opencv中使用的鱼眼相机畸变模型就是这个模型,该模型适用于大多数鱼眼相机。另外,也可以用这种模型来对普通的针孔相机模型进行标定,仔细观察,上述的线性投影实际就是普通的针孔投影模型。最后鱼眼相机的投影模型可以表示为
r = f θ d r = f \theta_d r=fθd
其中 r r r表示图像中像素点到主点的距离。
去畸变过程
对于鱼眼相机的去畸变过程可以采用解析的方式,因为从上述畸变公式中可以看到,畸变模型是一个多项式,理论上是存在解析解的。但本人使用的方法和针孔模型中类似,通过优化的方法进行去即便,代码如下
template<typename DERIVED_P>void undistort(const Eigen::MatrixBase <DERIVED_P> &p_d,const Eigen::MatrixBase <DERIVED_P> &p_ud) const{EIGEN_STATIC_ASSERT_VECTOR_SPECIFIC_SIZE_OR_DYNAMIC(Eigen::MatrixBase<DERIVED_P>, 2)Eigen::MatrixBase<DERIVED_P> &y_ud = const_cast<Eigen::MatrixBase<DERIVED_P> &>(p_ud);Eigen::MatrixBase<DERIVED_P> &y_d = const_cast<Eigen::MatrixBase<DERIVED_P> &>(p_d);y_ud.derived().resize(2);y_d.derived().resize(2);struct MLFunctor{MLFunctor( const Eigen::Vector2d &imagePoint, double k1, double k2, double k3, double k4 ): imagePoint_(imagePoint), _k1(k1), _k2(k2), _k3(k3), _k4(k4){}int operator( )( const Eigen::VectorXd &x, Eigen::VectorXd &fvec ) const{double theta = x[0];double phi = x[1];double theta2 = theta * theta;double theta4 = theta2 * theta2;double theta6 = theta4 * theta2;double theta8 = theta4 * theta4;double thetad = theta * ( 1 + _k1 * theta2 + _k2 * theta4 + _k3 * theta6 + _k4 * theta8);fvec[0] = thetad;fvec[1] = phi;fvec = fvec - imagePoint_;return 0;}int df( const Eigen::VectorXd &x, Eigen::MatrixXd &fjac ) const{double theta = x[0];double theta2 = theta * theta;double theta4 = theta2 * theta2;double theta6 = theta4 * theta2;double theta8 = theta4 * theta4;fjac(0, 0) = 9 * _k4 * theta8 + 7 * _k3 * theta6 + 5 * _k2 * theta4 + 3 * _k1 * theta2 + 1;fjac(0, 1) = 0;fjac(1, 0) = 0;fjac(1, 1) = 1;return 0;}int values() const { return 2; }int inputs() const { return 2; }Eigen::Vector2d imagePoint_;double _k1;double _k2;double _k3;double _k4;};Eigen::Vector2d target = y_d;MLFunctor func( target, m_k1, m_k2, m_k3, m_k4 );Eigen::LevenbergMarquardt< MLFunctor > lm(func);double theta = y_d[0];double phi = y_d[1];Eigen::VectorXd res = Eigen::Vector2d(theta, phi);lm.minimize(res);y_ud = res;}
投影过程
- 给定相机坐标系下一点 P c = ( x , y , z ) P_c=(x, y, z) Pc=(x,y,z)
- 归一化到球平面上 P s = P c ∣ ∣ P c ∣ ∣ = ( x s , y s , z s ) P_s = {{P_c} \over {||P_c||}}=(x_s, y_s,z_s) Ps=∣∣Pc∣∣Pc=(xs,ys,zs)
- 求经纬度 θ = a c o s ( z s ) = a t a n 2 ( x 2 + y 2 ) , z ) \theta=acos(z_s)=atan2(\sqrt{x^2+y^2)}, z) θ=acos(zs)=atan2(x2+y2),z), ϕ = a t a n 2 ( y s , x s ) \phi=atan2(y_s, x_s) ϕ=atan2(ys,xs)
- 利用畸变模型对 θ \theta θ进行加畸变处理,得到 θ d \theta_d θd。
- 最后得到该点在图像中的像素坐标 u = f x θ d x c r + c x u={{f_x\theta_d x_c}\over r } +cx u=rfxθdxc+cx, v = f y θ d y c r + c y v={{f_y\theta_d y_c}\over r } +cy v=rfyθdyc+cy, r = x c 2 + y c 2 r=\sqrt{x_c^2 + y_c^2} r=xc2+yc2
反投影过程
- 给定图像上一点 p = ( u , v ) p=(u, v) p=(u,v).
- 可以得到归一化坐标 p d = ( x , y ) = ( u − c x f x , v − c y f y ) p_{d} = (x, y) = ({{u - cx} \over f_x}, {{v - cy} \over f_y}) pd=(x,y)=(fxu−cx,fyv−cy)
- 可以得到带畸变的入射角 θ d = x 2 + y 2 , ϕ = a t a n 2 ( y , x ) \theta_d=\sqrt{x^2+y^2}, \phi=atan2(y, x) θd=x2+y2,ϕ=atan2(y,x).
- 去畸变后得到 θ \theta θ.
- 最后得到单位球面坐标 x = s i n ( θ ) c o s ( ϕ ) , y = s i n ( θ ) s i n ( ϕ ) , z = c o s ( θ ) x = sin(\theta)cos(\phi), y=sin(\theta)sin(\phi), z = cos(\theta) x=sin(θ)cos(ϕ),y=sin(θ)sin(ϕ),z=cos(θ)
雅可比计算
多数情况下,都用BA算法来计算相机的内外参,这就需要知道雅可比矩阵,即投影误差对各待优化变量的偏导数组成的矩阵。所谓的投影误差,实际检测到点与投影到图像上的点之间的误差
e r r = p m − p err=p_m - p err=pm−p
其中 p m p_m pm表示检测到的角点。为了避免手撕公式,我使用了matlab直接来推导出结果,并且在推导公式时,没有考虑畸变项,因为公式太长了,懒得敲。
代码:
syms fx fy x y z cx cy k1 k2 k3 k4R = sqrt(x^2 + y^2 + z^2);
xc = x / R;
yc = y / R;
zc = z / R;
theta = acos(z);
%thetad = theta + k1 * theta^3 + k2 * theta^5 + k3 * theta^7 + k4 * theta^9;
thetad = theta;
r = sqrt(xc^2 + yc^2);
u = fx * (thetad * xc) / r + cx;
v = fy * (thetad * yc) / r + cy;alphaE_alphaK = - [diff(u, fx), diff(u, fy), diff(u, cx), diff(u, cy);diff(v, fx), diff(v, fy), diff(v, cx), diff(v, cy)]alphaE_alphaP = -[diff(u, x), diff(u, y), diff(u, z);diff(v, x), diff(v, y), diff(v, z)]
alphaP_alphaR = [1, 0, 0, 0, z, -y; 0, 1, 0, -z, 0, x; 0, 0, 1, y, -x, 0]alphaE_alphaP * alphaP_alphaR
假设相机坐标系下归一化到球面的3D点坐标坐标为 P s = ( x s , y s , z s ) P_s=(x_s, y_s, z_s) Ps=(xs,ys,zs)
-
误差项关于内参的偏导数

其中 r = x s 2 + y s 2 r=\sqrt{x_s^2 + y_s^2} r=xs2+ys2, θ = a c o s ( z s ) \theta=acos(z_s) θ=acos(zs)。 -
误差项关于相机坐标系下点 P s P_s Ps的偏导

其中 r = x s 2 + y s 2 r=\sqrt{x_s^2 + y_s^2} r=xs2+ys2, θ = a c o s ( z s ) \theta=acos(z_s) θ=acos(zs)。 -
误差项在李代数上的扰动模型
根据链式法则可得
∂ e r r ∂ δ ξ = ∂ e r r ∂ P s ∂ P s ∂ δ ξ {{\partial err} \over {\partial \delta \xi }} = {{\partial err} \over {\partial {P_s}}}{{\partial {P_{\rm{s}}}} \over {\partial \delta \xi }} ∂δξ∂err=∂Ps∂err∂δξ∂Ps
其中, ∂ P c ∂ δ ξ {{\partial {P_{\rm{c}}}} \over {\partial \delta \xi }} ∂δξ∂Pc的推导后续会有专门篇幅进行总结,在这个先用起来再说。

其中 r = x s 2 + y s 2 r=\sqrt{x_s^2 + y_s^2} r=xs2+ys2, θ = a c o s ( z s ) \theta=acos(z_s) θ=acos(zs)。