本文在调参记录20的基础上,将残差模块的个数,从27个增加到60个,继续测试深度残差网络ResNet+自适应参数化ReLU激活函数在Cifar10数据集上的表现。
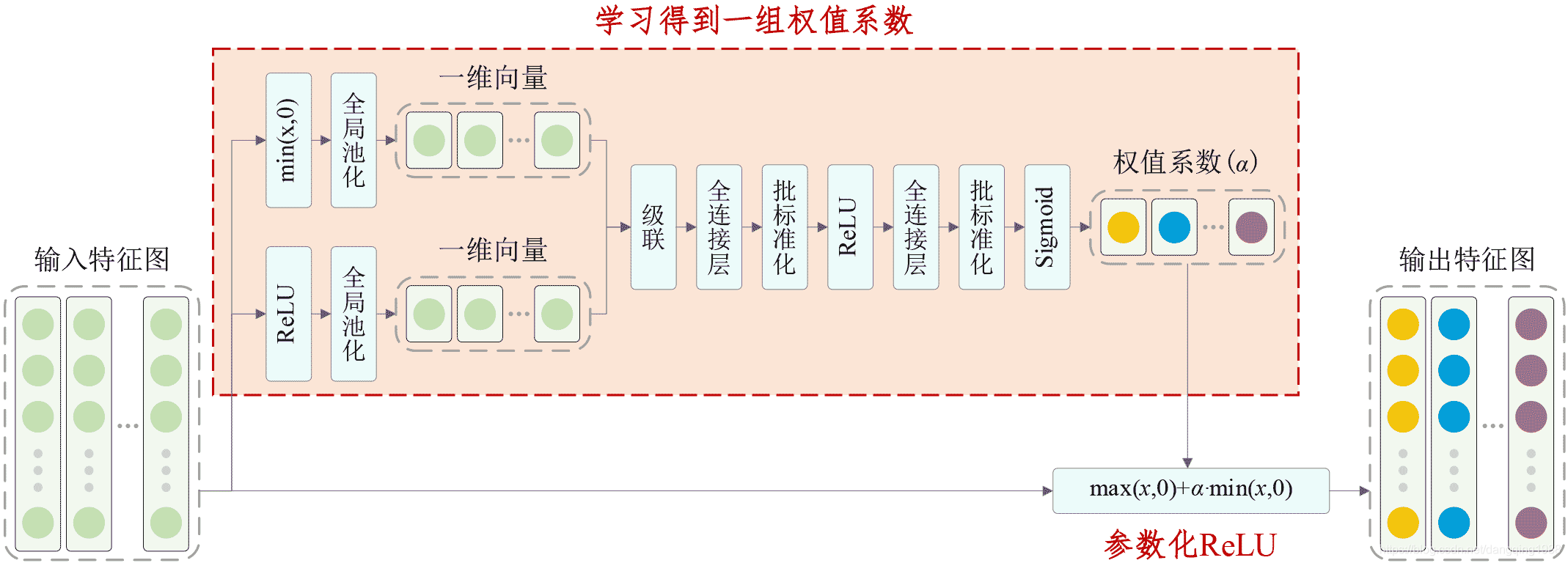
自适应参数化ReLU函数被放在了残差模块的第二个卷积层之后,这与Squeeze-and-Excitation Networks或者深度残差收缩网络是相似的。其基本原理如下
Keras程序如下:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Tue Apr 14 04:17:45 2020
Implemented using TensorFlow 1.10.0 and Keras 2.2.1Minghang Zhao, Shisheng Zhong, Xuyun Fu, Baoping Tang, Shaojiang Dong, Michael Pecht,
Deep Residual Networks with Adaptively Parametric Rectifier Linear Units for Fault Diagnosis,
IEEE Transactions on Industrial Electronics, 2020, DOI: 10.1109/TIE.2020.2972458 @author: Minghang Zhao
"""from __future__ import print_function
import keras
import numpy as np
from keras.datasets import cifar10
from keras.layers import Dense, Conv2D, BatchNormalization, Activation, Minimum
from keras.layers import AveragePooling2D, Input, GlobalAveragePooling2D, Concatenate, Reshape
from keras.regularizers import l2
from keras import backend as K
from keras.models import Model
from keras import optimizers
from keras.preprocessing.image import ImageDataGenerator
from keras.callbacks import LearningRateScheduler
K.set_learning_phase(1)# The data, split between train and test sets
(x_train, y_train), (x_test, y_test) = cifar10.load_data()# Noised data
x_train = x_train.astype('float32') / 255.
x_test = x_test.astype('float32') / 255.
x_test = x_test-np.mean(x_train)
x_train = x_train-np.mean(x_train)
print('x_train shape:', x_train.shape)
print(x_train.shape[0], 'train samples')
print(x_test.shape[0], 'test samples')# convert class vectors to binary class matrices
y_train = keras.utils.to_categorical(y_train, 10)
y_test = keras.utils.to_categorical(y_test, 10)# Schedule the learning rate, multiply 0.1 every 150 epoches
def scheduler(epoch):if epoch % 150 == 0 and epoch != 0:lr = K.get_value(model.optimizer.lr)K.set_value(model.optimizer.lr, lr * 0.1)print("lr changed to {}".format(lr * 0.1))return K.get_value(model.optimizer.lr)# An adaptively parametric rectifier linear unit (APReLU)
def aprelu(inputs):# get the number of channelschannels = inputs.get_shape().as_list()[-1]# get a zero feature mapzeros_input = keras.layers.subtract([inputs, inputs])# get a feature map with only positive featurespos_input = Activation('relu')(inputs)# get a feature map with only negative featuresneg_input = Minimum()([inputs,zeros_input])# define a network to obtain the scaling coefficientsscales_p = GlobalAveragePooling2D()(pos_input)scales_n = GlobalAveragePooling2D()(neg_input)scales = Concatenate()([scales_n, scales_p])scales = Dense(channels//16, activation='linear', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(scales)scales = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(scales)scales = Activation('relu')(scales)scales = Dense(channels, activation='linear', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(scales)scales = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(scales)scales = Activation('sigmoid')(scales)scales = Reshape((1,1,channels))(scales)# apply a paramtetric reluneg_part = keras.layers.multiply([scales, neg_input])return keras.layers.add([pos_input, neg_part])# Residual Block
def residual_block(incoming, nb_blocks, out_channels, downsample=False,downsample_strides=2):residual = incomingin_channels = incoming.get_shape().as_list()[-1]for i in range(nb_blocks):identity = residualif not downsample:downsample_strides = 1residual = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(residual)residual = Activation('relu')(residual)residual = Conv2D(out_channels, 3, strides=(downsample_strides, downsample_strides), padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual)residual = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(residual)residual = Activation('relu')(residual)residual = Conv2D(out_channels, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual)residual = aprelu(residual)# Downsamplingif downsample_strides > 1:identity = AveragePooling2D(pool_size=(1,1), strides=(2,2))(identity)# Zero_padding to match channelsif in_channels != out_channels:zeros_identity = keras.layers.subtract([identity, identity])identity = keras.layers.concatenate([identity, zeros_identity])in_channels = out_channelsresidual = keras.layers.add([residual, identity])return residual# define and train a model
inputs = Input(shape=(32, 32, 3))
net = Conv2D(16, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(inputs)
net = residual_block(net, 20, 32, downsample=False)
net = residual_block(net, 1, 32, downsample=True)
net = residual_block(net, 19, 32, downsample=False)
net = residual_block(net, 1, 64, downsample=True)
net = residual_block(net, 19, 64, downsample=False)
net = BatchNormalization(momentum=0.9, gamma_regularizer=l2(1e-4))(net)
net = Activation('relu')(net)
net = GlobalAveragePooling2D()(net)
outputs = Dense(10, activation='softmax', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(net)
model = Model(inputs=inputs, outputs=outputs)
sgd = optimizers.SGD(lr=0.1, decay=0., momentum=0.9, nesterov=True)
model.compile(loss='categorical_crossentropy', optimizer=sgd, metrics=['accuracy'])# data augmentation
datagen = ImageDataGenerator(# randomly rotate images in the range (deg 0 to 180)rotation_range=30,# Range for random zoomzoom_range = 0.2,# shear angle in counter-clockwise direction in degreesshear_range = 30,# randomly flip imageshorizontal_flip=True,# randomly shift images horizontallywidth_shift_range=0.125,# randomly shift images verticallyheight_shift_range=0.125)reduce_lr = LearningRateScheduler(scheduler)
# fit the model on the batches generated by datagen.flow().
model.fit_generator(datagen.flow(x_train, y_train, batch_size=100),validation_data=(x_test, y_test), epochs=500, verbose=1, callbacks=[reduce_lr], workers=4)# get results
K.set_learning_phase(0)
DRSN_train_score = model.evaluate(x_train, y_train, batch_size=100, verbose=0)
print('Train loss:', DRSN_train_score[0])
print('Train accuracy:', DRSN_train_score[1])
DRSN_test_score = model.evaluate(x_test, y_test, batch_size=100, verbose=0)
print('Test loss:', DRSN_test_score[0])
print('Test accuracy:', DRSN_test_score[1])
实验结果如下:
Using TensorFlow backend.
x_train shape: (50000, 32, 32, 3)
50000 train samples
10000 test samples
Epoch 1/500
156s 312ms/step - loss: 3.7450 - acc: 0.4151 - val_loss: 3.1432 - val_acc: 0.5763
Epoch 2/500
113s 226ms/step - loss: 2.9954 - acc: 0.5750 - val_loss: 2.5940 - val_acc: 0.6689
Epoch 3/500
113s 226ms/step - loss: 2.5203 - acc: 0.6476 - val_loss: 2.1871 - val_acc: 0.7254
Epoch 4/500
113s 225ms/step - loss: 2.1855 - acc: 0.6865 - val_loss: 1.9171 - val_acc: 0.7488
Epoch 5/500
113s 225ms/step - loss: 1.9224 - acc: 0.7144 - val_loss: 1.6662 - val_acc: 0.7774
Epoch 6/500
113s 225ms/step - loss: 1.7111 - acc: 0.7331 - val_loss: 1.4882 - val_acc: 0.7915
Epoch 7/500
113s 226ms/step - loss: 1.5472 - acc: 0.7483 - val_loss: 1.3414 - val_acc: 0.7994
Epoch 8/500
113s 226ms/step - loss: 1.4095 - acc: 0.7633 - val_loss: 1.2149 - val_acc: 0.8194
Epoch 9/500
113s 226ms/step - loss: 1.3008 - acc: 0.7739 - val_loss: 1.1264 - val_acc: 0.8234
Epoch 10/500
113s 226ms/step - loss: 1.2077 - acc: 0.7824 - val_loss: 1.0474 - val_acc: 0.8322
Epoch 11/500
113s 225ms/step - loss: 1.1382 - acc: 0.7885 - val_loss: 0.9929 - val_acc: 0.8343
Epoch 12/500
113s 225ms/step - loss: 1.0722 - acc: 0.7955 - val_loss: 0.9418 - val_acc: 0.8400
Epoch 13/500
113s 225ms/step - loss: 1.0242 - acc: 0.8032 - val_loss: 0.9018 - val_acc: 0.8421
Epoch 14/500
113s 225ms/step - loss: 0.9843 - acc: 0.8083 - val_loss: 0.8639 - val_acc: 0.8506
Epoch 15/500
113s 225ms/step - loss: 0.9520 - acc: 0.8101 - val_loss: 0.8522 - val_acc: 0.8491
Epoch 16/500
113s 226ms/step - loss: 0.9313 - acc: 0.8130 - val_loss: 0.8124 - val_acc: 0.8541
Epoch 17/500
113s 226ms/step - loss: 0.9033 - acc: 0.8190 - val_loss: 0.8156 - val_acc: 0.8484
Epoch 18/500
113s 226ms/step - loss: 0.8791 - acc: 0.8223 - val_loss: 0.7796 - val_acc: 0.8572
Epoch 19/500
113s 226ms/step - loss: 0.8628 - acc: 0.8289 - val_loss: 0.7842 - val_acc: 0.8559
Epoch 20/500
113s 225ms/step - loss: 0.8528 - acc: 0.8292 - val_loss: 0.7725 - val_acc: 0.8533
Epoch 21/500
113s 225ms/step - loss: 0.8432 - acc: 0.8292 - val_loss: 0.7405 - val_acc: 0.8687
Epoch 22/500
113s 225ms/step - loss: 0.8260 - acc: 0.8347 - val_loss: 0.7425 - val_acc: 0.8648
Epoch 23/500
113s 225ms/step - loss: 0.8180 - acc: 0.8357 - val_loss: 0.7319 - val_acc: 0.8666
Epoch 24/500
113s 226ms/step - loss: 0.8146 - acc: 0.8385 - val_loss: 0.7158 - val_acc: 0.8761
Epoch 25/500
113s 226ms/step - loss: 0.8029 - acc: 0.8387 - val_loss: 0.7228 - val_acc: 0.8705
Epoch 26/500
113s 225ms/step - loss: 0.7968 - acc: 0.8425 - val_loss: 0.7160 - val_acc: 0.8725
Epoch 27/500
113s 225ms/step - loss: 0.7940 - acc: 0.8433 - val_loss: 0.7176 - val_acc: 0.8747
Epoch 28/500
113s 226ms/step - loss: 0.7904 - acc: 0.8439 - val_loss: 0.7080 - val_acc: 0.8747
Epoch 29/500
113s 225ms/step - loss: 0.7810 - acc: 0.8450 - val_loss: 0.7234 - val_acc: 0.8679
Epoch 30/500
113s 225ms/step - loss: 0.7807 - acc: 0.8457 - val_loss: 0.6999 - val_acc: 0.8754
Epoch 31/500
113s 225ms/step - loss: 0.7795 - acc: 0.8487 - val_loss: 0.7116 - val_acc: 0.8745
Epoch 32/500
113s 225ms/step - loss: 0.7722 - acc: 0.8497 - val_loss: 0.7064 - val_acc: 0.8798
Epoch 33/500
113s 226ms/step - loss: 0.7678 - acc: 0.8533 - val_loss: 0.7148 - val_acc: 0.8709
Epoch 34/500
113s 226ms/step - loss: 0.7634 - acc: 0.8528 - val_loss: 0.7095 - val_acc: 0.8741
Epoch 35/500
113s 225ms/step - loss: 0.7684 - acc: 0.8535 - val_loss: 0.7070 - val_acc: 0.8768
Epoch 36/500
113s 225ms/step - loss: 0.7630 - acc: 0.8540 - val_loss: 0.6935 - val_acc: 0.8804
Epoch 37/500
113s 225ms/step - loss: 0.7557 - acc: 0.8566 - val_loss: 0.6997 - val_acc: 0.8785
Epoch 38/500
113s 225ms/step - loss: 0.7518 - acc: 0.8591 - val_loss: 0.7090 - val_acc: 0.8771
Epoch 39/500
113s 225ms/step - loss: 0.7537 - acc: 0.8581 - val_loss: 0.6784 - val_acc: 0.8879
Epoch 40/500
113s 226ms/step - loss: 0.7537 - acc: 0.8566 - val_loss: 0.6778 - val_acc: 0.8854
Epoch 41/500
113s 226ms/step - loss: 0.7461 - acc: 0.8613 - val_loss: 0.6941 - val_acc: 0.8800
Epoch 42/500
113s 226ms/step - loss: 0.7518 - acc: 0.8586 - val_loss: 0.7230 - val_acc: 0.8731
Epoch 43/500
113s 225ms/step - loss: 0.7562 - acc: 0.8561 - val_loss: 0.6876 - val_acc: 0.8859
Epoch 44/500
113s 225ms/step - loss: 0.7398 - acc: 0.8626 - val_loss: 0.6793 - val_acc: 0.8861
Epoch 45/500
113s 225ms/step - loss: 0.7402 - acc: 0.8638 - val_loss: 0.6860 - val_acc: 0.8857
Epoch 46/500
113s 225ms/step - loss: 0.7430 - acc: 0.8626 - val_loss: 0.6878 - val_acc: 0.8857
Epoch 47/500
113s 225ms/step - loss: 0.7372 - acc: 0.8656 - val_loss: 0.6758 - val_acc: 0.8885
Epoch 48/500
113s 225ms/step - loss: 0.7364 - acc: 0.8649 - val_loss: 0.6837 - val_acc: 0.8849
Epoch 49/500
113s 226ms/step - loss: 0.7374 - acc: 0.8639 - val_loss: 0.6730 - val_acc: 0.8902
Epoch 50/500
113s 226ms/step - loss: 0.7389 - acc: 0.8657 - val_loss: 0.6848 - val_acc: 0.8868
Epoch 51/500
113s 227ms/step - loss: 0.7354 - acc: 0.8654 - val_loss: 0.6788 - val_acc: 0.8892
Epoch 52/500
113s 227ms/step - loss: 0.7286 - acc: 0.8691 - val_loss: 0.6942 - val_acc: 0.8800
Epoch 53/500
113s 225ms/step - loss: 0.7365 - acc: 0.8653 - val_loss: 0.6929 - val_acc: 0.8820
Epoch 54/500
113s 226ms/step - loss: 0.7295 - acc: 0.8685 - val_loss: 0.6761 - val_acc: 0.8892
Epoch 55/500
113s 226ms/step - loss: 0.7319 - acc: