目录
- 一、ESP32的CAN通信说明
- 1.1、片内外设
- 1.2、CAN库的查找
- 1.3、MCP2515和SJA1000介绍
- 1.4、CAN库的安装
- 1.4.1、先下载库,再导入到arduino IDE中
- 1.4.2、通过“库管理器”安装。
- 二、硬件说明
- 2.1、硬件准备
- 2.2、硬件连接
- 三、代码调试
- 3.1、打开示例
- 3.2、修改代码
- 3.3、编译上传
- 四、其它说明
SimpleFOC、ODrive和VESC 教程链接汇总:请点击
一、ESP32的CAN通信说明
1.1、片内外设
CAN在ESP32芯片中叫TWAI,如下图:

1.2、CAN库的查找
ESP32官方提供的arduino库不支持CAN通信,也没有对应的例程,所以需要使用第三方库。
Arduino官网查找对应的库,如下图:


arduino官方库中不支持CAN通信,更没有ESP32的CAN通信库,如下图:

往下翻,社区贡献的库,如下图:
这名字一看就是擅长营销的人起的,前面带个“A”,排名可以靠前。

继续往下翻,又找到一些,如下图:

这些库我只是大概看了看,简单使用了下,大家可以自行对比测试。
1.3、MCP2515和SJA1000介绍
- 上面的库里都提到了MCP2515,所以简单介绍下。
- 在Arduino中,考虑到跨平台的兼容性,这个芯片被拿出来频繁使用。
- 在一些没有CAN外设的单片机上,比如UNO上古老的MEGA328P就没有CAN功能,还必须使用MCP2515。
- MCP2515简单来说是一个把SPI接口转换为CAN接口的转换芯片,在单片机普遍没有集成CAN外设的年代,他可以做为外挂实现CAN通信。但现在的单片机基本都已经集成了CAN,比如STM32和ESP32,所以这个芯片的使用价值就大打折扣了,而且它需要占用大量的IO口,同时多了这个芯片的成本,所以我本人是不推荐大家使用这个芯片的。

- SJA1000和MCP2515一样,都是本世纪初期的芯片。
- 这个芯片我觉得目前应该是已经被淘汰了,ESP32把它集成到芯片内部做为片内外设,ESP官方手册中并没有说明,但是在arduino库中,第三方说明了这个情况。当然大家不用研究这个芯片的使用方法,知道这个情况就行。

1.4、CAN库的安装
库的安装有两种方法:先下载再安装 或者 通过库管理器安装。
1.4.1、先下载库,再导入到arduino IDE中
-
接上面1.2节,下载0.3.1最新版本,压缩包要放在没有中文的路径下,如下图:

-
导入下载的压缩包,

1.4.2、通过“库管理器”安装。


两种库的安装效果是完全一样的,安装完毕后,可以看到示例,如下图:

二、硬件说明
2.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | ESP32drive | 1 |
| 2 | CAN通信芯片 | 1 |
| 3 | CAN盒 | 1 |
| 4 | USB转TTL | 1 |
| 5 | 12V电源 | 1 |
| 6 | 杜邦线 | 若干 |

ESP32drive 购买链接:某宝购买
2.2、硬件连接
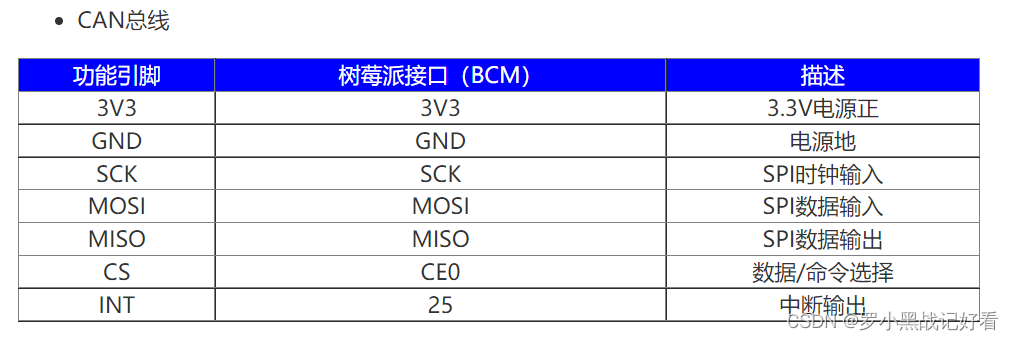
2.2.1、CAN通信芯片
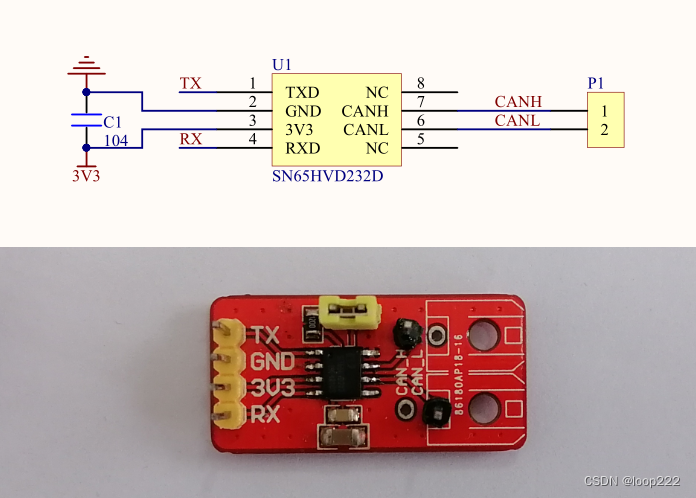
2.2.2、通信原理图

2.2.3、接线

三、代码调试
3.1、打开示例

3.2、修改代码
- 默认的通信引脚是GPIO4和5,需要修改为21和22,
- 示例为只读文件,修改后需要另存为,不要保存到中文路径下。
- 需要说明下,代码中设置的CAN波特率为500K,但实际只有250K。如果希望实际波特率为500K,需要设置为“1000E3”。波特率不正确,CAN盒无法收到数据且没有任何提示,这个问题浪费我一周时间。

3.3、编译上传

四、其它说明
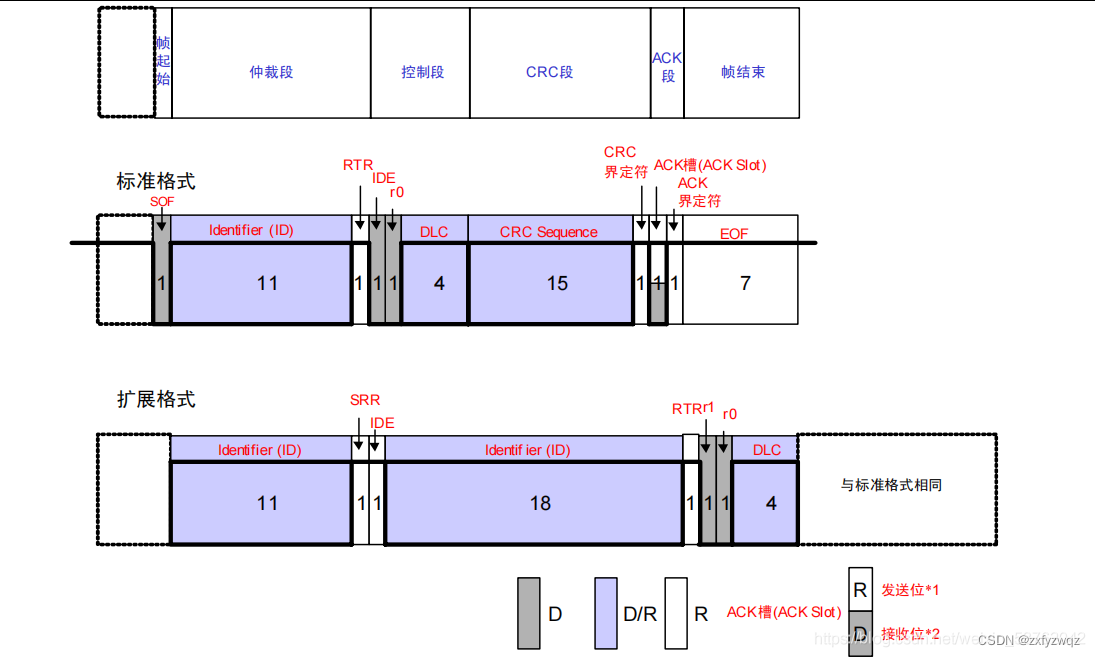
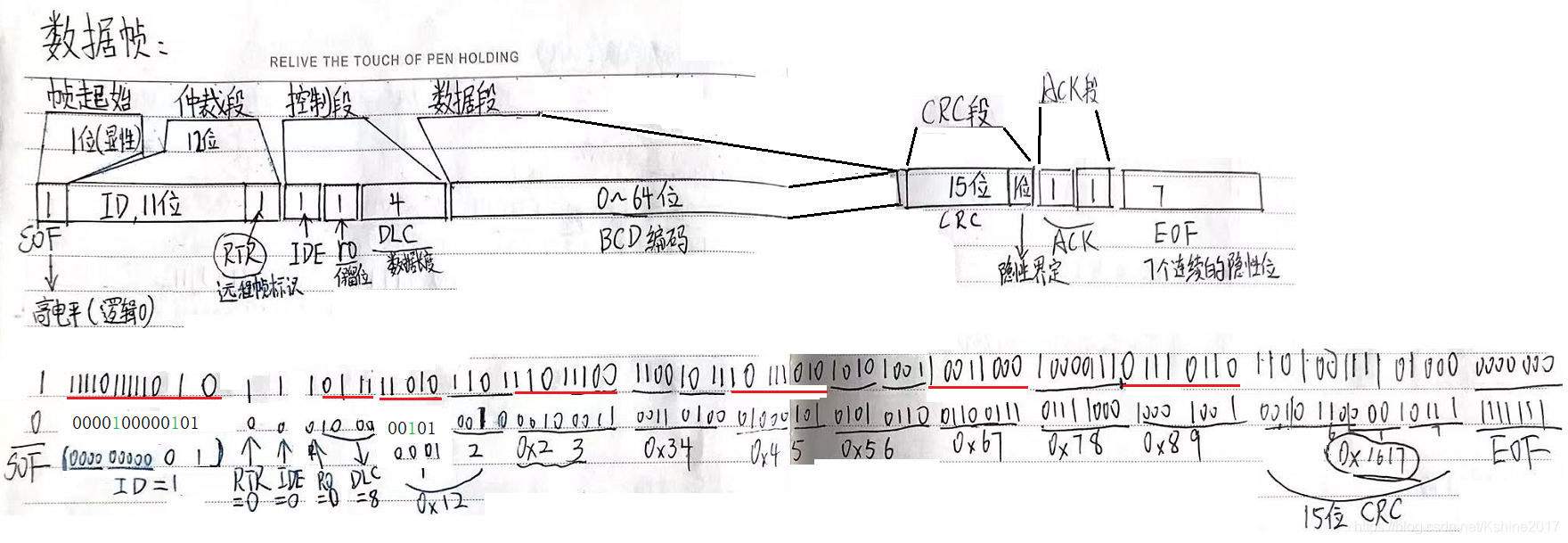
OBD就是 汽车故障诊断仪,这个示例很高大上。CAN总线据说就是起源于汽车电子,CAN通信本身很简单,但在实际使用过程中有着非常复杂的协议机制,您仍然需要查找更多的资料去学习掌握。

(完)










](https://img-blog.csdnimg.cn/35c1fcbe344f4ce6ab088bf68d64b924.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBALea7oeiIuea4heaipuWOi-aYn-aysw==,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)