文章标题:《Visual Object Tracking using Adaptive Correlation Filters》
文章地址:http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.294.4992&rep=rep1&type=pdf
文章代码:(python)https://github.com/opencv/opencv/blob/master/samples/python/mosse.py
(C++)https://github.com/opencv/opencv_contrib/blob/master/modules/tracking/samples/tutorial_customizing_cn_tracker.cpp
2010年CVPR的一篇的文章
Abstract
相关滤波器(correlation filters)虽然用得不多,但是在物体被旋转、遮挡或者有其它干扰的复杂情况下实施跟踪,速度要比当前的先进技术快 20 20 20 倍。最古老、最简单的相关滤波器使用了简单的模板,实际跟踪时不太好用。ASEF 和 UMACE 等现代一点的方法性能好一点,但是它们的训练需求不太适应用于跟踪。视觉跟踪任务要求从单帧图像训练出鲁棒的滤波器,并且在跟踪过程中,根据目标外观的变化进行动态调整。
本文提出了一种新型相关滤波器:MOSSE(Minimum Output Sum of Squared Error),我们在初始化的时候,从一帧图像中产生稳定的相关滤波器。基于MOSSE滤波器的跟踪器以每秒 669 669 669 帧的速度运行,对光照、比例、姿态和非刚性变形的变化具有鲁棒性。跟踪的时候根据峰值与旁瓣比(peak-to-sidelobe ratio,PSR)判断是否发生遮挡,以此决定是否暂停跟踪,等物体重新出现时恢复跟踪。
具体做法
获取选区:
首先把输入图像转为灰度图,选取跟踪区域。修改选区框的尺寸,使得该尺寸是做离散傅里叶变换的最佳尺寸。
然后根据选区创建汉宁窗(HanningWindow),它用于突出图像中心区域,减弱图像边缘区域。(这个后面用到)
把它裁剪出来,得到输入数据 f f f:

预处理:
常规操作。把输入图像 f f f 的数据取对数,使数据无偏,符合正态分布。对数效果示意图:

然后减均值,除以方差,把数据标准化(Normaization)。
最后乘以汉宁窗。
建立求解目标:
设置我们对该选区的期望输出响应 g g g。它是一个中间值很大,四周值很小的矩形图片,尺寸和选区尺寸一样大。
可视化如下:

(具体做法可以看代码)
我们希望训练得到一个相关过滤器 h \color{red}h h,使 f ☆ h = g f ☆ h = g f☆h=g :

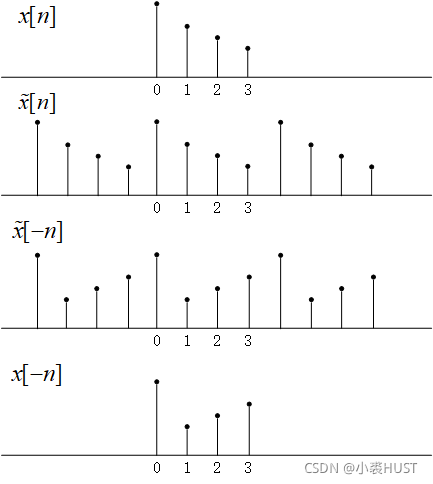
其中符号 ☆ ☆ ☆ 表示做 “相关” 运算。
“相关” 运算和 “卷积” 运算很像,二维情况下,对卷积核关于 2 2 2 个轴先后旋转 18 0 ∘ 180^{\circ} 180∘,再做卷积,就是 “相关”。
所以主要是 “核” 不同。 具体去网上查资料或者看冈萨雷斯的《数字图像处理》(第四版) p101。
如果训练良好,这个相关过滤器 h h h 大概长这样:

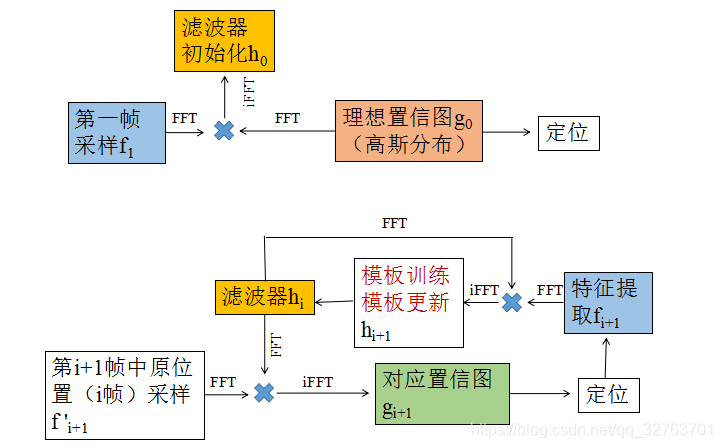
怎样找到 h h h 呢?
我们知道在傅里叶域做乘法相当于在空间域做卷积,于是先通过快速傅里叶变换 ( F F T FFT FFT) 把数据从图像空间域转到傅里叶域,然后在傅里叶域进行操作,这样可以减少计算量。我们用对应的大写字母表示傅里叶域的数据:
输入图像: F = F ( f ) F = \mathcal{F}(f) F=F(f) , 相关过滤器: H = F ( h ) H= \mathcal{F}(h) H=F(h) ,输出响应: G = F ( g ) G= \mathcal{F}(g) G=F(g)。
于是相关运算在傅里叶域表示为: F ⊙ H ∗ = G (1) F \; \odot \; H^* = G \tag{1} F⊙H∗=G(1)
其中符号 ⊙ \odot ⊙ 表示逐个元素的相乘,符号 ∗ * ∗ 表示复共轭,也就是虚部取相反的符号。
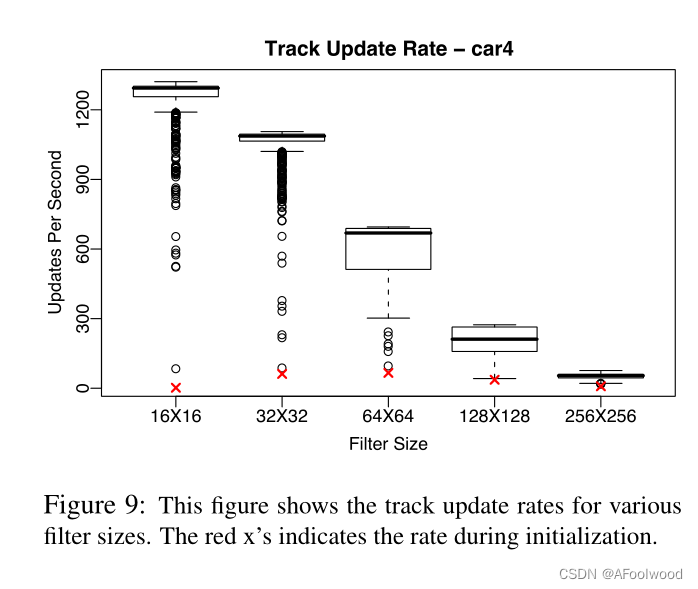
这个运算的速度主要取决于傅里叶变换和傅里叶逆变换,时间复杂度上限是 O ( P l o g P ) O(PlogP) O(PlogP), P P P 是选区的像素数量。
求解:
在初始化的时候,我们有 i i i 组数据,对于输入图像数据 F i F_i Fi,我们期望输出的响应为 G i G_i Gi。
通过求解以下最小化问题,“训练” 出我们期望的相关核 H H H: min H ∗ ∑ i ∣ F i ⊙ H ∗ − G i ∣ 2 (3) \min_{H^*} \sum^{}_{i} | F_i \odot H^* - G_i |^2 \tag{3} H∗mini∑∣Fi⊙H∗−Gi∣2(3)
这叫做最小化平方误差和(Sum of Squared Error,SSE),文章的标题和跟踪器的名字由此而来。
作者在文章的附录中给出了求解公式。作者表示这是一个凸的,使偏导为 0 0 0 得到求解公式: H ∗ = ∑ i G i ⊙ F i ∗ ∑ i F i ⊙ F i ∗ (4) H^* = \frac{\sum_i G_i \odot F_i^*} {\sum_i F_i \odot F_i^*} \tag{4} H∗=∑iFi⊙Fi∗∑iGi⊙Fi∗(4)
这 i i i 组数据怎么来? 代码中 i = 128 i=128 i=128,在初始化的时候,对输入图像 f f f 做 128 128 128 次随机仿射变换(旋转、拉伸等)得到一系列图:

每张图片输出响应 G i G_i Gi 不变,依旧是用(图1)那个 g g g 的傅里叶逆变换 G i G_i Gi。将 F i F_i Fi , G i G_i Gi 代入式 (4) 求得 H H H。
不做仿射变换,只用一张原图也可以,但是这样得到的滤波器太精确,会过拟合这幅图像,当应用到新图像 (下一帧) 的时候容易跟踪失败。
这种对数据增强然后求平均的方法,可以产生一个更具泛化能力的滤波器。
(对弱分类器的输出进行平均,从而产生一个强得多的分类器)。
另外,我们还对图片加入了白噪声 ϵ \epsilon ϵ ,具有正则化的效果。可以得到具有更好的噪声容忍能力的滤波器。
在两个地方加,一个是图片预处理的时候加,一个是在式 (4) 中加: F i ⊙ F i ∗ + ϵ F_i \odot F_i^* +\epsilon Fi⊙Fi∗+ϵ 。
初始化完毕后,就得到了滤波器模板 H H H。
在线更新:(选区框)
在跟踪问题中,目标不总是居中的。
例如当下一帧数据来到的时候,我们的选区(目标框)还处于原来的位置,但是里面的目标已经移动了。
在 f f f 中峰值会随着目标的移动而移动。用目前的滤波器 H H H 做相关时,得到的响应也会发生变化:

通过计算响应峰值点的相对位移,来更新跟踪框的坐标,使目标仍处于跟踪框中心。
值得注意的是,目标框的大小没有得到更新,这也是 MOSSE 算法的不足之一。
在线更新:(滤波器)
在跟踪的过程中,目标通常会发生旋转、缩放、姿态、光照的变化,甚至外观发生非刚性形变,所以滤波器需要随之适应和更新。
记 H 1 = ∑ i G i ⊙ F i ∗ H_1 = \sum_i G_i \odot F_i^* H1=∑iGi⊙Fi∗ , H 2 = ∑ i F i ⊙ F i ∗ H_2 = \sum_i F_i \odot F_i^* H2=∑iFi⊙Fi∗
则式 (4) 简写为: H ∗ = H 1 H 2 H^* = \frac{H_1}{H_2} H∗=H2H1
下一帧数据 F n F_{n} Fn 来到的时候,通过以下式子更新 H H H: H 1 n e w = ( 1 − η ) H 1 + η G ⊙ F n ∗ H 2 n e w = ( 1 − η ) H 2 + η F n ⊙ F n ∗ H_1^{new} = \textcolor{red}{(1-\eta)}\;H_1 + \textcolor{red}{ \eta }\; G \odot F_{n}^* \\[1em] H_2^{new} = \textcolor{red}{(1-\eta)}\;H_2 + \textcolor{red}{ \eta }\; F_{n} \odot F_{n}^* H1new=(1−η)H1+ηG⊙Fn∗H2new=(1−η)H2+ηFn⊙Fn∗
即:
H ∗ = ( 1 − η ) H 1 + η G ⊙ F n ∗ ( 1 − η ) H 2 + η F n ⊙ F n ∗ H^* = \frac{ \textcolor{red}{(1-\eta)}\;H_1 + \textcolor{red}{ \eta }\; G \odot F_{n}^*} {\textcolor{red}{(1-\eta)}\;H_2 + \textcolor{red}{ \eta }\; F_{n} \odot F_{n}^*} H∗=(1−η)H2+ηFn⊙Fn∗(1−η)H1+ηG⊙Fn∗
η \eta η 称为学习率,实际中取 η = 0.125 \eta = 0.125 η=0.125 效果较好。
得到新的过滤器和新的选区,就可以进行下一帧的跟踪了。不断迭代这个过程。
失败判定与PSR:
我们用 PSR(Peak to Sidelobe Ratio)度量响应尖峰的强度。
对于相关输出 g g g,我们找出峰值点 g max g_{\text{max}} gmax,以峰值点为中心建立 11 × 11 11\times 11 11×11 的矩形框。
计算这个矩形区域的均值 μ s1 \mu_{\text{s1}} μs1 和标准差 σ s1 \sigma_{\text{s1}} σs1,则 PSR = g max − μ s1 σ s1 \text{PSR} = \frac{g_{\text{max}} - \mu_{\text{s1}}}{\sigma_{\text{s1}}} PSR=σs1gmax−μs1
实验发现,对于正常跟踪的情况下,PSR 值大致处于 20.0 20.0 20.0 到 60.0 60.0 60.0 之间。
当 PSR 降到大概 7.0 7.0 7.0 左右时,表示目标被遮挡或者跟踪失败了。
在应用实现中,PSR 处于 3.0 3.0 3.0 到 10.0 10.0 10.0 时对于更新目标框是没什么用的。
python代码
链接:https://pan.baidu.com/s/1eAE9fJJBkh50oMaRfCI8AA
提取码:1234