1、加载影像
打开ENVI软件,可以直接将tif格式影像拖入软件工作界面;或点击“File-Open”,在弹出的对话框中,选取要实验的tif遥感影像。
2、制作样本(感兴趣区ROI文件)
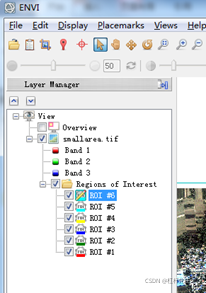
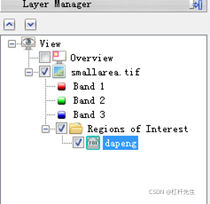
在软件左侧工具栏,右键单击影像名,在弹出的工具框中,左键点击“New Region of Interest”,得到新建的一个ROI文件。对影像分几类,就需建立几个ROI文件。本实验分为6类,如下图所示。
2.1 制作ROI #1类样本
左键双击新建的ROI文件,弹出如下图所示的工具框,在ROI Name处可进行修改,本实验分水面样本,所以输入water,在右侧颜色处选取浅蓝色,代表该ROI文件是水面样本。

在遥感影像上选取明确是水面的区域(如在影像中无法明确确定是水面,则不能作为样本),左键单击,画不规划闭环多边形,生成一个水面的ROI样本,如下图所示。

如需对之前生成的ROI进行删除或修改,可以点击工具框![]() 中的黑色按钮,定位到要修改的ROI位置,点击
中的黑色按钮,定位到要修改的ROI位置,点击![]() 即可删除之前生成的ROI。
即可删除之前生成的ROI。
2.2 制作其余5类样本
采用2.1描述的方法,依此制作其余5类样本即可。
2.3 存储样本文件
右键单击Region of Interest,在弹出的工具栏中左键单击Save As…,弹出下图所示的对话框,选取输出文件位置,保存,以xml文件格式保存ROI样本。
如后续需要加载该样本文件,可在ENVI主菜单中,单击“File-Open”,选择该xml文件,即可在Data Manager中加载该样本文件,如下图所示。

当需要修改某类样本时,在某类样本处,右键单击Load ROI,即可加载该样本文件。如下图所示,加载dapeng样本显示。
3、计算各样本间的分离性
该步骤是计算各类样本间的差异性,分离性越大,说明各样本间的相似特征越少。
左键双击任一样本,弹出如下图所示的ROI Tool。左键单击“Options-Computer ROI Seperability”,选取要计算的ROI样本,如下图所示,点击OK。

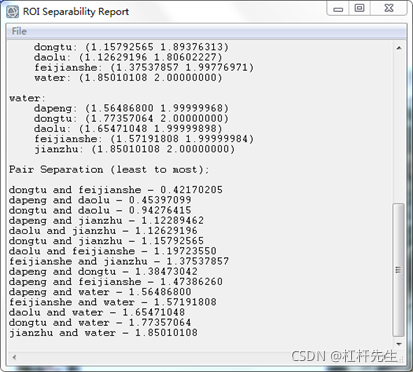
运行完毕,得到如下图所示的ROI间样本分离性报告。当两类样本的分离性大于1.9时,即说明该两类样本间的差异性明显,可以直接分出两样本;当分离性越小时,说明两样本间的相似特征更多。
4、制作掩膜文件
在软件右侧工具栏Toolbox中,左键点击“Raster Managerment-Masking-Build Mask”,弹出如下图所示的对话框。

选择要做掩膜文件的基准影像,点击OK即可。弹出如下图所示的对话框,选择要监督分类的影像范围,选取输出文件,即可。

5、监督分类
在软件右侧工具栏Toolbox中,左键点击“Classification-Supervised Classification”,可看到如下图所示的监督分类方法。使用最多的几种方法:最大似然分类、最小距离分类、神经网络分类、支持向量机分类。每种方法各有优缺点,为得到更优的分类方法,建议每种方法多试验几次,择优选择。
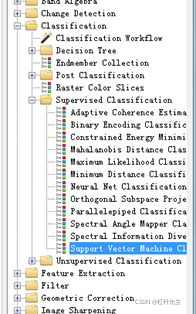
本文采用支持向量机的方法进行tif影像的监督分类,左键双击Support Vector Machine Classification,弹出如下图所示的对话框,选择要进行分类的tif影像(必须为tif文件,这里不支持img影像分类)。
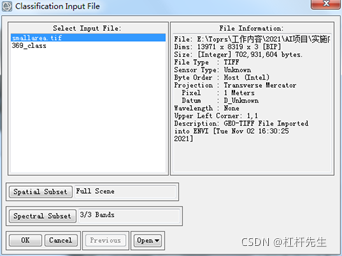
在Spatial Subset位置可单击,弹出如下图所示的对话框。点击File,选取上述的掩膜文件,如下图所示,监督分类可根据掩膜文件确定要处理的影像范围。


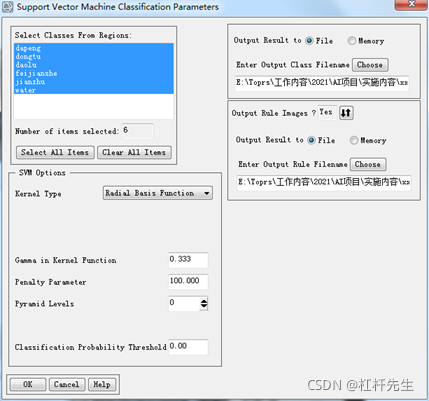
点击OK,弹出如下图所示的对话框。选择所要分类的样本(本次实验6类样本全选择),确定输出的文件名,即可。
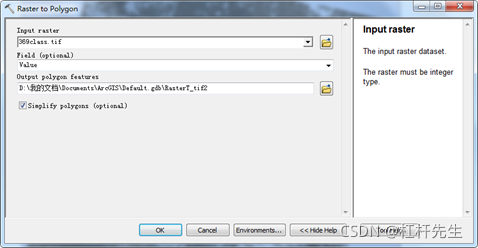
6、分类图转标签矢量shp文件
将得到的分类图,拖入ArcGIS软件中,点击“ArcToolBox-Conversion Tools-From Raster-Raster to Polygon”,在弹出的对话框中输入上述得到的分类图tif文件,输入输出文件名,即可。