目录
- 前言(作者:宏晶科技)
- 一、飞控配件
- 二、接线
- 三、原理图
- 四、调试
- 五、程序
- 六、完整工程、原理图文件获取
前言(作者:宏晶科技)
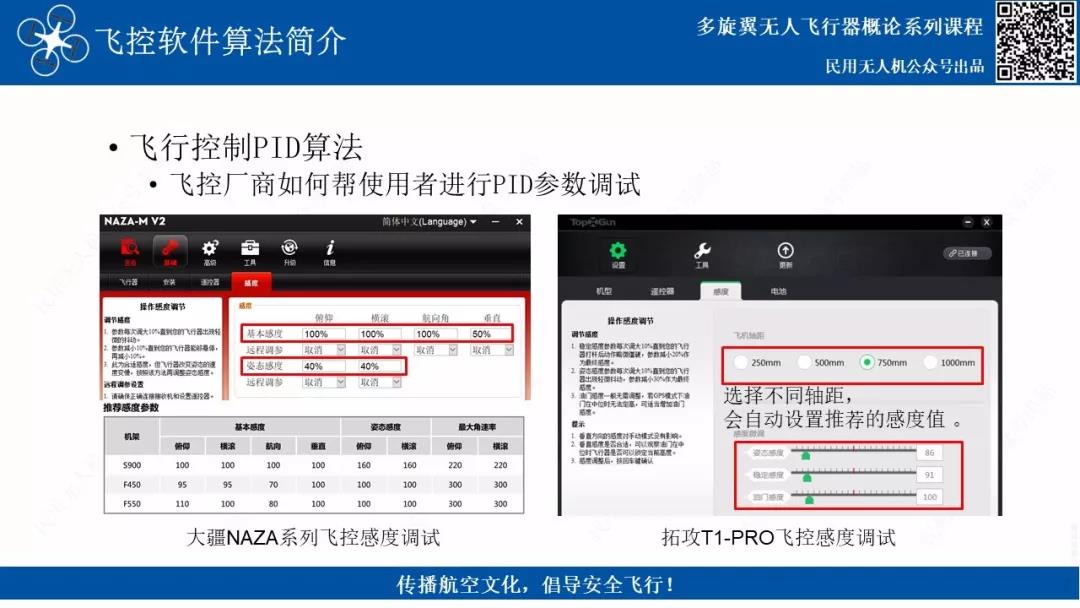
本飞控仅仅是姿态飞行控制,没有GPS、电子罗盘、气压高度计、超声波测距、光流传感器等等,不能实现定点悬停,但是飞行感觉非常好,稳定,特别是暴力飞行的刺激,是很多玩家所喜欢的。用户可以自行增加这些传感器,编写相关的程序,以获得更好的飞行性能。
本飞控通过调整PID参数可以适应从250mm轴距到750mm 轴距的,都实际装机验证过,效果很好。
本例实用F450的四轴机架,大约40元,安装简单,入门快,让玩家可以快速的装配成功,如动手能力强可以自己买配件做机架,铝合金或碳纤维均可。我喜欢用铝合金方管,好加工,强度好,还很轻。
配套使用MC6B的遥控、接收套件,左手油门(俗称“美国手”),大约130元,是我能找到的最便宜的遥控器了,不差钱的玩家可以使用更昂贵的遥控器套件。四轴实物照片如下图所示。
一、飞控配件
1、STC8A8K16S4A12 LQFP44做的飞控1块。
2、MPU-6050三轴陀螺仪、三轴加速度传感器模块1块。MC6B遥控、接收机1套。
3、F450玻纤四轴机架1套。
4、2212无刷电机4个(配香蕉插)。20A电调4个。T插插头1个。
5、9450正反桨2对(实际买多些,因为新手会有损耗)。3S锂电池4200mAH 1块(用户可以购买多块爽飞)。B6平衡充(带12V 5A电源)1套。
6、12号硅胶线红、黑色给20cm。魔术带(捆绑电池的)1条。3M双面胶(3*7cm,粘电调、飞控用)2片。
7、扎丝或扎带若干(扎丝,因为可以方便的拧下来)。
二、接线
四轴上电待机:上电后,航灯不亮,接收机LED闪烁,此时打开遥控器,将左右油门下拉到最小,接收机收到信号LED常亮,表示RF通讯已连接。此时蜂鸣器“哗”一声,航灯闪烁,表示待机模式。
四轴启动:将遥控器左右操纵杆掰成下内八,启动四轴,四轴“哗”一声,4个螺旋桨开始低速旋转,航灯常亮。此后提升油门,就可以加速螺旋桨,直到起飞。
四轴飞行:起飞后,可以操纵右手的俯仰、横滚操纵杆,实现前后左右或任意方向的飞行。左手油门杆左掰是航向逆时针转,右掰是航向顺时钟转。
四轴下降停止:收油门,四轴逐渐下降到地面,然后两操纵杆掰成下外八,停止四轴,重新处于待机模式。
四轴水平校准:将四轴放置于水平地面,处于待机模式,然后两操纵杆掰成上内八,四轴“哗”一声进入校准,完成后“哗哗”两声完成校准。
四轴取消水平校准:将四轴放置于水平地面,处于待机模式,然后两操纵杆掰成上外八,四轴“哗”一声取消校准。取消水平校准或未进行水平校准过的四轴,起飞时即使无风也可能会有明显漂移。
电池低压报警:当电池低压时,蜂鸣器“哗哗”报警,同时航灯闪烁,此时请尽快回航降落。无遥控信号异常:当四轴在空中突然收不到遥控信号时,四轴蜂鸣器发出“哗哗哗”报警,同时航灯闪烁,四轴保持水平,逐渐自动减小油门降落。



三、原理图

四、调试
串口1: 下载、调试、控制信号输入。
串口2: 备用为GPS接口或数传接口。
控制信号排针要靠在一起布线成3排针392.54。
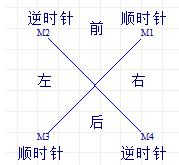
P1-P4 对应接收机的俯仰、横滚、油门、航向PPM信号。M1~M4输出到4个电调的信号。P5备用。
四个电机安排顺序如下:
五、程序
/* 本程序经过测试完全正常, 不提供电话技术支持, 如不能理解, 请自行补充相关基础. *//*** 特别注意: 下载时选择内部时钟24MHZ, 设置用户EEPROM大小为2K或以上. ****//*********************************************四轴飞控-V10.C使用遥控接收器型号: MC6B六通道2.4G 100mW.四轴上电待机:上电后,航灯不亮,接收机LED闪烁,此时打开遥控器,将左右油门下拉到最小,接收机收到信号LED常亮,表示RF通讯已连接。此时蜂鸣器"哔"一声,航灯闪烁,表示待机模式。四轴启动:将遥控器左右操纵杆掰成下内八,启动四轴,四轴"哔"一声,4个螺旋桨开始低速旋转,航灯常亮。此后提升油门,就可以加速螺旋桨,直到起飞。四轴飞行:起飞后,可以操纵右手的俯仰、横滚操纵杆,实现前后左右或任意方向的飞行。左手油门杆左掰是航向逆时针转,右掰是航向顺时钟转。四轴下降停止:收油门,四轴逐渐下降到地面,然后两操纵杆掰成下外八,停止四轴,重新处于待机模式。四轴水平校准:将四轴放置于水平地面,处于待机模式,然后两操纵杆掰成上内八,四轴"哔"一声进入校准,完成后"哔哔"两声完成校准。四轴取消水平校准:将四轴放置于水平地面,处于待机模式,然后两操纵杆掰成上外八,四轴"哔"一声取消校准。取消水平校准或未进行水平校准过的四轴,起飞时即使无风也可能会有明显漂移。电池低压报警:当电池低压时,蜂鸣器"哔哔"报警,同时航灯闪烁,此时请尽快回航降落。无遥控信号异常:当四轴在空中突然收不到遥控信号时,四轴蜂鸣器发出"哔哔哔"报警,同时航灯闪烁,四轴保持水平,逐渐自动减小油门降落。***********************************************/#define Baudrate1 115200UL
#define TX1_LENGTH 128
#define RX1_LENGTH 128#include "config.h"
#include "STC8xxx_PWM.H"
#include "MPU6050.H"
#include "AD.H"
#include "EEPROM.H"
#include "PCA.h"
#include <math.H>sbit P_Light = P5^4; //航灯
sbit P_BUZZER = P5^5; //蜂鸣器int xdata g_x=0,g_y=0,g_z=0; //陀螺仪矫正参数
float xdata a_x=0,a_y=0; //角度矫正参数
float data AngleX=0,AngleY=0; //四元数解算出的欧拉角
float xdata Angle_gx=0,Angle_gy=0,Angle_gz=0; //由角速度计算的角速率(角度制)
float xdata Angle_ax=0,Angle_ay=0,Angle_az=0; //由加速度计算的加速度(弧度制)
float xdata Ax=0,Ay=0,Az=0; //加入遥控器控制量后的角度
float data PID_x=0,PID_y=0,PID_z=0; //PID最终输出量
int data speed0=0,speed1=0,speed2=0,speed3=0; //电机速度参数
int data PWM0=0,PWM1=0,PWM2=0,PWM3=0;//,PWM4=0,PWM5=0; //加载至PWM模块的参数int int_tmp;
u8 YM=0,FRX=128,FRY=128,FRZ=128; //4通道遥控信号.
u8 xdata tp[16]; //读MP6050缓冲//****************姿态处理和PID*********************************************float xdata Out_PID_X=0,Last_Angle_gx=0; //外环PI输出量 上一次陀螺仪数据
float xdata ERRORX_Out=0,ERRORX_In=0; //外环P 外环I 外环误差积分
float xdata Out_PID_Y=0,Last_Angle_gy=0;
float xdata ERRORY_Out=0,ERRORY_In=0; //规则1:内外环P乘积等于10.5float xdata Last_Ax=0,Last_Ay=0,Last_Az=0;/******************************************************************************/
#define Out_XP 6.65f //ADC0 外环P V1 / 10
#define Out_XI 0.0074f //ADC4 外环I V2 / 10000
#define Out_XD 6.0f //ADC5 外环D V3 / 10#define In_XP 0.8275f //ADC6 内环P V4 / 100
#define In_XI 0.0074f //ADC4 内环I V2 / 10000
#define In_XD 6.0f //ADC5 内环D V3 / 10#define Out_YP Out_XP
#define Out_YI Out_XI
#define Out_YD Out_XD#define In_YP In_XP
#define In_YI In_XI
#define In_YD In_XD#define ZP 5.0f
#define ZI 0.1f
#define ZD 4.0f //自旋控制的P D
float Z_integral=0;//Z轴积分#define ERR_MAX 500
//======================================================================u8 data YM_LostCnt=0, Lost16S; //上一次RxBuf[0]数据(RxBuf[0]数据在不断变动的) 状态标识
u8 SW2_tmp;//======================================================================
bit B_8ms; //8ms标志bit B_rtn_ADC0; //请求返回信息
bit B_BAT_LOW; //低电压标志
u8 xdata cnt_ms; //时间计数u8 xdata UART1_cmd=0; //串口命令
u8 xdata TX1_Read=0; //发送读指针
u8 xdata TX1_Write=0; //发送写指针
u8 xdata TX1_cnt=0; //发送计数
u8 xdata TX1_Buffer[TX1_LENGTH]; //发送缓冲
bit B_TX1_Busy; //发送忙标志
u8 xdata RX1_Cnt,RX1_Timer;
u8 xdata RX1_Buffer[RX1_LENGTH];
bit B_RX1_OK;u8 xdata Cal_Setp=0; //校准步骤
u8 xdata Cal_cnt=0; //校准平均值计数
int xdata x_sum,y_sum,z_sum; //校准累加和
float xdata float_x_sum,float_y_sum; //校准累加和u8 xdata BuzzerOnTime,BuzzerOffTime,BuzzerRepeat,BuzzerOnCnt,BuzzerOffCnt;
u8 xdata cnt_100ms;/* =================== PPM接收相关变量 ========================== */
u16 xdata CCAP0_RiseTime; //捕捉到的上升沿时刻
u8 xdata PPM1_Rise_TimeOut; //高电平限时
u8 xdata PPM1_Rx_TimerOut; //接收超时计数
u8 xdata PPM1_RxCnt; //接收次数计数
u16 xdata PPM1_Cap; //捕捉到的PPM脉冲宽度
bit B_PPM1_OK; //接收到一个PPM脉冲宽度u16 xdata CCAP1_RiseTime;
u8 xdata PPM2_Rise_TimeOut; //高电平限时
u8 xdata PPM2_Rx_TimerOut;
u8 xdata PPM2_RxCnt;
u16 xdata PPM2_Cap;
bit B_PPM2_OK;u16 xdata CCAP2_RiseTime;
u8 xdata PPM3_Rise_TimeOut; //高电平限时
u8 xdata PPM3_Rx_TimerOut;
u8 xdata PPM3_RxCnt;
u16 xdata PPM3_Cap;
bit B_PPM3_OK;u16 xdata CCAP3_RiseTime;
u8 xdata PPM4_Rise_TimeOut; //高电平限时
u8 xdata PPM4_Rx_TimerOut;
u8 xdata PPM4_RxCnt;
u16 xdata PPM4_Cap;
bit B_PPM4_OK;u16 xdata CCAP_FallTime;u8 PPM1,PPM2,PPM3,PPM4;
bit B_Start;
u8 cnt_start;/* ============================================= */void UART1_config(void);
void PrintString1(u8 *puts); //发送一个字符串
void TX1_write2buff(u8 dat); //写入发送缓冲,指针+1
void TX1_int_value(int i);
void delay_ms(u8 ms);
void Return_Message(void);
u16 MODBUS_CRC16(u8 *p,u8 n); //input: *p--->First Data Address,n----->Data Number, return: CRC16
void PCA_config(void);
void Timer0_Config(void);
void Timer1_Config(void);
void return_TTMx(u8 id,PPMx);
void Timer0_Config(void);
u16 MODBUS_CRC16(u8 *p,u8 n); //input: *p--->First Data Address,n----->Data Number, return: CRC16extern xdata u16 adc0;
extern xdata int Battery;//*********************************************************************
//****************角度计算*********************************************
//*********************************************************************
#define pi 3.14159265f
#define Kp 0.8f
#define Ki 0.001f
#define halfT 0.004f float idata q0=1,q1=0,q2=0,q3=0;
float idata exInt=0,eyInt=0,ezInt=0; void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az)
{float data norm;float idata vx, vy, vz;float idata ex, ey, ez;norm = sqrt(ax*ax + ay*ay + az*az); //把加速度计的三维向量转成单维向量 ax = ax / norm;ay = ay / norm;az = az / norm;// 下面是把四元数换算成《方向余弦矩阵》中的第三列的三个元素。 // 根据余弦矩阵和欧拉角的定义,地理坐标系的重力向量,转到机体坐标系,正好是这三个元素// 所以这里的vx vy vz,其实就是当前的欧拉角(即四元数)的机体坐标参照系上,换算出来的// 重力单位向量。vx = 2*(q1*q3 - q0*q2);vy = 2*(q0*q1 + q2*q3);vz = q0*q0 - q1*q1 - q2*q2 + q3*q3 ;ex = (ay*vz - az*vy) ;ey = (az*vx - ax*vz) ;ez = (ax*vy - ay*vx) ;exInt = exInt + ex * Ki;eyInt = eyInt + ey * Ki;ezInt = ezInt + ez * Ki;gx = gx + Kp*ex + exInt;gy = gy + Kp*ey + eyInt;gz = gz + Kp*ez + ezInt;q0 = q0 + (-q1*gx - q2*gy - q3*gz) * halfT;q1 = q1 + ( q0*gx + q2*gz - q3*gy) * halfT;q2 = q2 + ( q0*gy - q1*gz + q3*gx) * halfT;q3 = q3 + ( q0*gz + q1*gy - q2*gx) * halfT;norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);q0 = q0 / norm;q1 = q1 / norm;q2 = q2 / norm;q3 = q3 / norm;AngleX = asin(2*(q0*q2 - q1*q3 )) * 57.2957795f; // 俯仰 换算成度AngleY = asin(2*(q0*q1 + q2*q3 )) * 57.2957795f; // 横滚
}//****************姿态计算*********************************************
void PWM_int (void) interrupt 22 //PWM中断函数
{PWMCFG = 0; //CBIF; //清除中断标志B_8ms = 1;//======================== 超时溢出处理 ==============================================PPM1_Rise_TimeOut++; //高电平限时PPM2_Rise_TimeOut++; //高电平限时PPM3_Rise_TimeOut++; //高电平限时PPM4_Rise_TimeOut++; //高电平限时if(--PPM1_Rx_TimerOut == 0) //超过100ms收不到信号{PPM1_RxCnt = 0; //一旦出现溢出, 则开始的n个脉冲无效PPM1 = 128;; //默认中点}if(--PPM2_Rx_TimerOut == 0) //超过100ms收不到信号{PPM2_RxCnt = 0; //一旦出现溢出, 则开始的n个脉冲无效PPM2 = 128;; //默认中点}if(--PPM3_Rx_TimerOut == 0) //超过200ms收不到信号{PPM3_RxCnt = 0; //一旦出现溢出, 则开始的n个脉冲无效}if(--PPM4_Rx_TimerOut == 0) //超过100ms收不到信号{PPM4_RxCnt = 0; //一旦出现溢出, 则开始的n个脉冲无效PPM4 = 128; //默认中点}
//======================================================================if(++YM_LostCnt >= 250) //失联2秒后{YM_LostCnt = 200; //重复0.4秒,失控保护if(PPM3 > 80) PPM3--;else if(++Lost16S >= 40){Lost16S = 250;PPM3 = 0;B_Start = 0;}}if(YM_LostCnt >= 25) //失联200ms{PPM1 = 128;PPM2 = 128; //俯仰 横滚 航向均归0PPM4 = 128;}FRX = PPM1;FRY = PPM2;YM = PPM3; //油门FRZ = PPM4;//********************************************************************************************Read_MPU6050(tp); //680usAngle_ax = ((float)(((int *)&tp)[0])) / 8192.0; //加速度处理 结果单位是 +- gAngle_ay = ((float)(((int *)&tp)[1])) / 8192.0; //转换关系 8192 LSB/g, 1g对应读数8192Angle_az = ((float)(((int *)&tp)[2])) / 8192.0; //加速度量程 +-4g/SLast_Angle_gx = Angle_gx; //储存上一次角速度数据Last_Angle_gy = Angle_gy;Angle_gx = ((float)(((int *)&tp)[4] - g_x)) / 65.5; //陀螺仪处理 结果单位是 +-度Angle_gy = ((float)(((int *)&tp)[5] - g_y)) / 65.5; //陀螺仪量程 +-500度/S, 1度/秒 对应读数 65.536Angle_gz = ((float)(((int *)&tp)[6] - g_z)) / 65.5; //转换关系65.5 LSB/度IMUupdate(Angle_gx*0.0174533f, Angle_gy*0.0174533f, Angle_gz*0.0174533f, Angle_ax,Angle_ay,Angle_az);//**********************************X轴指向************************************************Ax = AngleX - a_x - ((float)FRX - 128) / 4.0; //角度控制量加载至角度if(YM > 35) ERRORX_Out += Ax, ERRORX_Out += Ax, ERRORX_Out += Ax; //外环积分(油门小于某个值时不积分)else ERRORX_Out = 0; //油门小于定值时清除积分值if(ERRORX_Out > 1500) ERRORX_Out = 1500;else if(ERRORX_Out < -1500) ERRORX_Out = -1500; //积分限幅Out_PID_X = Ax*Out_XP + ERRORX_Out*Out_XI + (Ax-Last_Ax)*Out_XD; //外环PILast_Ax = Ax;if(YM > 35) ERRORX_In += (Angle_gy - Out_PID_X); //内环积分(油门小于某个值时不积分)else ERRORX_In = 0; //油门小于定值时清除积分值if(ERRORX_In > 500) ERRORX_In = 500;else if(ERRORX_In < -500) ERRORX_In = -500; //积分限幅PID_x = (Angle_gy + Out_PID_X) * In_XP + ERRORX_In * In_XI + (Angle_gy - Last_Angle_gy) * In_XD; //内环PIDif(PID_x > 500) PID_x = 500; //输出量限幅if(PID_x < -500) PID_x = -500;//**************Y轴指向**************************************************Ay = AngleY - a_y + ((float)FRY - 128) / 4.0; //角度控制量加载至角度if(YM > 35) ERRORY_Out += Ay, ERRORY_Out += Ay, ERRORY_Out += Ay; //外环积分(油门小于某个值时不积分)else ERRORY_Out = 0; //油门小于定值时清除积分值if(ERRORY_Out > 1500) ERRORY_Out = 1500;else if(ERRORY_Out < -1500) ERRORY_Out = -1500; //积分限幅Out_PID_Y = Ay * Out_YP + ERRORY_Out * Out_YI + (Ay-Last_Ay)*Out_YD; //外环PIDLast_Ay = Ay;if(YM > 35) ERRORY_In += (Angle_gx - Out_PID_Y); //内环积分(油门小于某个值时不积分)else ERRORY_In = 0; //油门小于定值时清除积分值if(ERRORY_In > 500) ERRORY_In = 500;else if(ERRORY_In < -500) ERRORY_In = -500; //积分限幅PID_y = (Angle_gx + Out_PID_Y) * In_YP + ERRORY_In * In_YI + (Angle_gx - Last_Angle_gx) * In_YD; //内环PIDif(PID_y > 500) PID_y = 500; //输出量限幅if(PID_y <-500) PID_y = -500;//**************Z轴指向(Z轴随便啦,自旋控制没必要上串级PID)***************************** Az = Angle_gz - ((float)FRZ - 128);if(YM > 35) Z_integral += Az; //Z轴积分else Z_integral = 0; //油门小于40积分清零if(Z_integral > 500.0f) Z_integral = 500.0f; //积分限幅else if(Z_integral < -500.0f) Z_integral = -500.0f; //积分限幅PID_z = Az * ZP + Z_integral * ZI + (Az - Last_Az) * ZD;Last_Az = Az;if(PID_z > 200) PID_z = 200; //输出量限幅if(PID_z < -200) PID_z = -200;speed0 = (int)( PID_x + PID_y + PID_z); //M1改为逆时针speed1 = (int)( PID_x - PID_y - PID_z);speed2 = (int)( -PID_x - PID_y + PID_z);speed3 = (int)( -PID_x + PID_y - PID_z);//**************将速度参数加载至PWM模块************************************************* if(YM < 10) PWM0 = 1000, PWM1 = 1000, PWM2 = 1000, PWM3 = 1000;else if(YM < 35) PWM0 = 860, PWM1 = 860, PWM2 = 860, PWM3 = 860;else{int_tmp = 1000 - (int)YM * 4;PWM0 = int_tmp - speed0;if(PWM0 > 1000) PWM0 = 1000; //速度参数控制,防止超过PWM参数范围0-1000else if(PWM0 < 10) PWM0 = 10;PWM1 = int_tmp - speed1;if(PWM1 > 1000) PWM1 = 1000;else if(PWM1 < 10) PWM1 = 10;PWM2 = int_tmp - speed2;if(PWM2 > 1000) PWM2 = 1000;else if(PWM2 < 10) PWM2 = 10;PWM3 = int_tmp - speed3;if(PWM3 > 1000) PWM3 = 1000;else if(PWM3 < 10) PWM3 = 10;}SW2_tmp = P_SW2; //保存SW2设置EAXSFR(); //访问XFRPWM0T2 = (u16)(PWM0 * 2);PWM1T2 = (u16)(PWM1 * 2);PWM2T2 = (u16)(PWM2 * 2);PWM3T2 = (u16)(PWM3 * 2); P_SW2 = SW2_tmp; //恢复SW2设置}/********************** 蜂鸣函数 ************************/
void beep(void) //100ms调用
{if(BuzzerRepeat > 0) //蜂鸣器处理, 重复次数不为0,则蜂鸣器要发声{if((BuzzerOnCnt == 0) && (BuzzerOffCnt == 0)) //On和OFF都为0,则开始装载On和Off的时间{P_BUZZER = 1; //允许蜂鸣BuzzerOnCnt = BuzzerOnTime; //装载on计数BuzzerOffCnt = BuzzerOffTime; //装载off计数}else if(BuzzerOnCnt > 0) {if(--BuzzerOnCnt == 0) P_BUZZER = 0;} //On的时间else if(BuzzerOffCnt > 0) //Off的时间{if(--BuzzerOffCnt == 0) BuzzerRepeat--;}}else P_BUZZER = 0;
}void SetBuzzer(u8 on,u8 off,u8 rep) // rep: 重复次数, on: on的时间, off: off的时间
{BuzzerRepeat = rep;BuzzerOnTime = on;BuzzerOffTime = off;if(BuzzerOnTime == 0) BuzzerOnTime = 1;if(BuzzerOffTime == 0) BuzzerOffTime = 1;if(BuzzerRepeat == 1) BuzzerOffTime = 1;BuzzerOnCnt = 0, BuzzerOffCnt = 0;
}// ===================== 自动校准序列 =====================
void AutoCal(void)
{if(PPM3 < 40) //停止时才允许校准{if(Cal_Setp == 1) //进入校准序列{x_sum = 0; y_sum = 0; z_sum = 0;Cal_cnt = 0;Cal_Setp = 2;}else if(Cal_Setp == 2) //对陀螺仪累加{x_sum += ((int *)&tp)[4]; //读取陀螺仪数据y_sum += ((int *)&tp)[5];z_sum += ((int *)&tp)[6];if(++Cal_cnt >= 64){g_x = x_sum / 64;g_y = y_sum / 64;g_z = z_sum / 64;float_x_sum = 0; float_y_sum = 0;Cal_cnt = 0;Cal_Setp = 3;}}else if(Cal_Setp == 3) //对X Y角度累加{float_x_sum += AngleX;float_y_sum += AngleY;if(++Cal_cnt >= 64){Cal_cnt = 0;Cal_Setp = 0;a_x = float_x_sum / 64.0;a_y = float_y_sum / 64.0;IAP_Gyro();SetBuzzer(5,1,1);}}}else{Cal_Setp = 0;Cal_cnt = 0;}
}// ===================== 主函数 =====================
void main(void)
{//所有I/O口全设为准双向,弱上拉模式P0M0=0x00; P0M1=0x00;P1M0=0x00; P1M1=0x00;P2M0=0x00; P2M1=0x00;P3M0=0x00; P3M1=0x00;P4M0=0x00; P4M1=0x00;P5M0=0x00; P5M1=0x00;P6M0=0x00; P6M1=0x00;P7M0=0x00; P7M1=0x00;PPM1 = 128;PPM2 = 128;PPM3 = 0;PPM4 = 128;PWMGO();P_Light = 0;P_BUZZER = 0;P5n_push_pull(0x30);adc_init(); //启动A/DPCA_config();delay_ms(100);IAPRead(); //读取陀螺仪静差InitMPU6050(); //初始化MPU-6050delay_ms(100);PWMCR = 0xc0;//ECBI; //允许PWM计数器归零中断EA = 1; //允许总中断cnt_start = 0;while(cnt_start < 25) //等待油门最小 20ms * 25 = 500ms{if(B_PPM3_OK) //油门{B_PPM3_OK = 0;if(PPM3_Cap <= 1200) cnt_start++;}delay_ms(1);}P_Light = 0;cnt_start = 0;SetBuzzer(5,1,1);//==============================================UART1_config(); // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.PrintString1("STC15W4K系列大四轴飞控程序!\r\n"); //SUART1发送一个字符串
//==============================================B_Start = 0; //上电禁止运行while(1){if(B_PPM1_OK) //左右(横滚){B_PPM1_OK = 0;if(PPM1_Cap < 1120) PPM1_Cap = 1120;else if(PPM1_Cap > 1880) PPM1_Cap = 1880;PPM2 = (u8)((PPM1_Cap-1116)/3); //转为0~255, 中间值为128}if(B_PPM2_OK) //前后(俯仰){B_PPM2_OK = 0;if(PPM2_Cap < 1120) PPM2_Cap = 1120;else if(PPM2_Cap > 1880) PPM2_Cap = 1880;PPM1 = (u8)((PPM2_Cap-1116)/3); //转为0~255, 中间值为128}if(B_PPM4_OK) //航向{B_PPM4_OK = 0;if(PPM4_Cap < 1056) PPM4_Cap = 1056;if(PPM4_Cap > 1940) PPM4_Cap = 1940;if(PPM4_Cap < 1440) PPM4_Cap = PPM4_Cap + 60;else if(PPM4_Cap > 1560) PPM4_Cap = PPM4_Cap - 60;else PPM4_Cap = 1500;PPM4 = (u8)((PPM4_Cap-1116)/3); //转为0~255, 中间值为128}if(B_PPM3_OK) //油门{B_PPM3_OK = 0;if(PPM3_Cap < 1000) PPM3_Cap = 1000;if(PPM3_Cap > 1900) PPM3_Cap = 1900;if(B_Start) //正在运行时,{PPM3 = (u8)((PPM3_Cap-1000)/4); //转为0~255, 实际8~225if(PPM3 < 32) PPM3 = 32;if((PPM1 < 50) && (PPM2 < 50) && (PPM3_Cap < 1120) && (PPM4 > 200)) //下外八, 禁止{if(++cnt_start >= 50) //1秒{cnt_start = 0;B_Start = 0;SetBuzzer(1,1,2);}}else cnt_start = 0;}else //禁止运行时, 等待内八开启{PPM3 = 0;if((PPM1 < 50) && (PPM2 > 200) && (PPM3_Cap < 1120) && (PPM4 < 50)) //下内八, 启动{if(++cnt_start >= 50) //1秒{cnt_start = 0;B_Start = 1;SetBuzzer(5,1,1);}}else if((PPM1 > 200) && (PPM2 > 200) && (PPM3_Cap > 1850) && (PPM4 < 50)) //上内八, 水平校准{if(++cnt_start >= 50) //1秒{cnt_start = 0;SetBuzzer(2,1,1);Cal_Setp = 1;}}else if((PPM1 > 200) && (PPM2 < 50) && (PPM3_Cap > 1850) && (PPM4 > 200)) //上外八, 取消水平校准{if(++cnt_start >= 50) //1秒{cnt_start = 0;g_x = 0;g_y = 0;g_z = 0;a_x = 0;a_y = 0;IAP_Gyro();SetBuzzer(1,1,2);}}else cnt_start = 0;}}if(B_8ms) //8ms到{B_8ms = 0;if(Cal_Setp != 0) AutoCal(); //是否执行自动校准序列AD(); // 读ADC计算电压if(++cnt_100ms >= 12) cnt_100ms = 0, beep(); //100ms处理一次蜂鸣器B = cnt_ms;++cnt_ms;B = (B ^ cnt_ms) & cnt_ms;if(B2) //64ms{if(!B_BAT_LOW && (YM_LostCnt < 120)) //电压足, 信号正常{if(!B_Start) P_Light = 0; // 空闲时, 则慢闪(每2048ms亮64ms)else P_Light = 1; // 启动后, 灯常亮}}else if(B4) //256ms{if(B_BAT_LOW || (YM_LostCnt >= 120)) P_Light = ~P_Light; //电压低, 或无信号, 航灯闪烁 2HZ}else if(B6) //1024ms{if(Battery < 1090) B_BAT_LOW = 1; else if(Battery > 1110) B_BAT_LOW = 0; //<10.90V电压低, >11.10V电压够if(B_BAT_LOW) SetBuzzer(1,1,2); //电压低if(B_rtn_ADC0) Return_Message(); //请求返回ADC0数据if(!B_BAT_LOW && (YM_LostCnt < 120)) P_Light = 1; //遥控信号正常, 电压正常时}else if(B7) //2048ms{if(!B_BAT_LOW && (YM_LostCnt >= 120)) SetBuzzer(1,1,3); //电压正常时 遥控信号丢失, 每两秒短鸣3次,}}if(UART1_cmd != 0){if(UART1_cmd == 'a') //PC发送a,飞控返回一些参数{B_rtn_ADC0 = ~B_rtn_ADC0;}UART1_cmd = 0;}if((TX1_Read != TX1_Write) && (!B_TX1_Busy)) //有数据要发送, 并且发送空闲{SBUF = TX1_Buffer[TX1_Read];B_TX1_Busy = 1;if(++TX1_Read >= TX1_LENGTH) TX1_Read = 0;}}
}//=========================================================void Return_Message(void)
{TX1_write2buff('V');TX1_write2buff('=');TX1_write2buff(Battery/1000 + '0');TX1_write2buff((Battery%1000)/100 + '0');TX1_write2buff('.');TX1_write2buff((Battery%100)/10 + '0');TX1_write2buff(Battery%10 + '0');TX1_write2buff(' ');TX1_write2buff(' ');PrintString1("AngleX=");TX1_int_value((int)(AngleX * 10));PrintString1("AngleY=");TX1_int_value((int)(AngleY * 10));PrintString1("AngleZ=");TX1_int_value((int)(Angle_gz * 10));PrintString1("a_x=");TX1_int_value(a_x * 10);PrintString1("a_y=");TX1_int_value(a_y * 10);PrintString1("g_z=");TX1_int_value(g_z * 10);TX1_cnt = 0;TX1_write2buff(0x0d);TX1_write2buff(0x0a);
}void delay_ms(u8 ms)
{u16 i;do{i = MAIN_Fosc / 13000;while(--i) ; //13T per loop}while(--ms);
}void TX1_int_value(int i)
{if(i < 0) TX1_write2buff('-'), i = 0 - i;else TX1_write2buff(' ');TX1_write2buff(i / 1000 + '0');TX1_write2buff((i % 1000) / 100 + '0');TX1_write2buff((i % 100) / 10 + '0');TX1_write2buff('.');TX1_write2buff(i % 10 + '0');TX1_write2buff(' ');TX1_write2buff(' ');
}/*************** 装载串口1发送缓冲 *******************************/
void TX1_write2buff(u8 dat) //写入发送缓冲,指针+1
{TX1_Buffer[TX1_Write] = dat;if(++TX1_Write >= TX1_LENGTH) TX1_Write = 0;
}//========================================================================
// 函数: void PrintString1(u8 *puts)
// 描述: 串口1发送字符串函数。
// 参数: puts: 字符串指针.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void PrintString1(u8 *puts) //发送一个字符串
{for (; *puts != 0; puts++) TX1_write2buff(*puts); //遇到停止符0结束
}//========================================================================
// 函数: SetTimer2Baudrate(u16 dat)
// 描述: 设置Timer2做波特率发生器。
// 参数: dat: Timer2的重装值.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================void SetTimer2Baudrate(u16 dat) // 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
{AUXR &= ~(1<<4); //Timer stopAUXR &= ~(1<<3); //Timer2 set As TimerAUXR |= (1<<2); //Timer2 set as 1T modeTH2 = dat / 256;TL2 = dat % 256;IE2 &= ~(1<<2); //禁止中断AUXR |= (1<<4); //Timer run enable
}//========================================================================
// 函数: void UART1_config(u8 brt)
// 描述: UART1初始化函数。
// 参数: brt: 选择波特率, 2: 使用Timer2做波特率, 其它值: 使用Timer1做波特率.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void UART1_config(void)
{/*********** 波特率使用定时器2 *****************/AUXR |= 0x01; //S1 BRT Use Timer2;SetTimer2Baudrate(65536UL - (MAIN_Fosc / 4) / Baudrate1);/*********** 波特率使用定时器1 *****************/
/* TR1 = 0;AUXR &= ~0x01; //S1 BRT Use Timer1;AUXR |= (1<<6); //Timer1 set as 1T modeTMOD &= ~(1<<6); //Timer1 set As TimerTMOD &= ~0x30; //Timer1_16bitAutoReload;TH1 = (u8)((65536UL - (MAIN_Fosc / 4) / Baudrate1) / 256);TL1 = (u8)((65536UL - (MAIN_Fosc / 4) / Baudrate1) % 256);ET1 = 0; //禁止中断INT_CLKO &= ~0x02; //不输出时钟TR1 = 1;
*/ //========================================================================SCON = (SCON & 0x3f) | 0x40; //UART1模式, 0x00: 同步移位输出, 0x40: 8位数据,可变波特率, 0x80: 9位数据,固定波特率, 0xc0: 9位数据,可变波特率PS = 1; //高优先级中断ES = 1; //允许中断REN = 1; //允许接收P_SW1 &= 0x3f;P_SW1 |= 0x00; //UART1 switch to, 0x00: P3.0 P3.1, 0x40: P3.6 P3.7, 0x80: P1.6 P1.7 (必须使用内部时钟)
// PCON2 |= (1<<4); //内部短路RXD与TXD, 做中继, ENABLE,DISABLEB_TX1_Busy = 0;TX1_Read = 0;TX1_Write = 0;UART1_cmd = 0;TX1_cnt = 0;
}//========================================================================
// 函数: void UART1_int (void) interrupt UART1_VECTOR
// 描述: UART1中断函数。
// 参数: nine.
// 返回: none.
// 版本: VER1.0
// 日期: 2014-11-28
// 备注:
//========================================================================
void UART1_int (void) interrupt 4
{if(RI){RI = 0;UART1_cmd = SBUF;}if(TI){TI = 0;B_TX1_Busy = 0;}
}void PCA_config(void)
{PPM1_Rise_TimeOut = 0;PPM2_Rise_TimeOut = 0;PPM3_Rise_TimeOut = 0;PPM4_Rise_TimeOut = 0;CR = 0;CH = 0;CL = 0;AUXR1 = (AUXR1 & ~(3<<4)) | PCA_P12_P17_P16_P15_P14; //切换IO口CMOD = (CMOD & ~(7<<1)) | PCA_Clock_12T; //选择时钟源 STC8F8K D版本
// CMOD = (CMOD & ~1) | 1; //ECFPPCA = 1; //高优先级中断CCAPM0 = PCA_Mode_Capture | PCA_Rise_Active | PCA_Fall_Active | ENABLE; //工作模式, 中断模式PCA_PWM0 = PCA_PWM_8bit; //PWM宽度
// CCAP0L = (u8)CCAP0_tmp; //将影射寄存器写入捕获寄存器,先写CCAPnL
// CCAP0H = (u8)(CCAP0_tmp >> 8); //后写CCAPnHCCAPM1 = PCA_Mode_Capture | PCA_Rise_Active | PCA_Fall_Active | ENABLE; //工作模式, 中断模式PCA_PWM1 = PCA_PWM_8bit; //PWM宽度
// CCAP1L = (u8)CCAP1_tmp; //将影射寄存器写入捕获寄存器,先写CCAPnL
// CCAP1H = (u8)(CCAP1_tmp >> 8); //后写CCAPnHCCAPM2 = PCA_Mode_Capture | PCA_Rise_Active | PCA_Fall_Active | ENABLE; //工作模式, 中断模式PCA_PWM2 = PCA_PWM_8bit; //PWM宽度
// CCAP2L = (u8)CCAP2_tmp; //将影射寄存器写入捕获寄存器,先写CCAPnL
// CCAP2H = (u8)(CCAP2_tmp >> 8); //后写CCAPnHCCAPM3 = PCA_Mode_Capture | PCA_Rise_Active | PCA_Fall_Active | ENABLE; //工作模式, 中断模式PCA_PWM3 = PCA_PWM_8bit; //PWM宽度
// CCAP3L = (u8)CCAP3_tmp; //将影射寄存器写入捕获寄存器,先写CCAPnL
// CCAP3H = (u8)(CCAP3_tmp >> 8); //后写CCAPnHCR = 1;
}//========================================================================
// 函数: void PCA_Handler (void) interrupt PCA_VECTOR
// 描述: PCA中断处理程序.
// 参数: None
// 返回: none.
// 版本: V1.0, 2012-11-22
//========================================================================
void PCA_Handler (void) interrupt PCA_VECTOR
{if(CCF0) //PCA模块0中断{CCF0 = 0; //清PCA模块0中断标志if(P17) //上升沿{CCAP0_RiseTime = ((u16)CCAP0H << 8) + CCAP0L; //读CCAP0PPM1_Rise_TimeOut = 1; //收到上升沿, 高电平限时}else //下降沿{CCAP_FallTime = ((u16)CCAP0H << 8) + CCAP0L; //读CCAP0if((PPM1_Rise_TimeOut != 0) && (PPM1_Rise_TimeOut < 3)) //收到过上升沿, 高电平也没有溢出{CCAP_FallTime = (CCAP_FallTime - CCAP0_RiseTime) >> 1; //为了好处理, 转成单位为usif((CCAP_FallTime >= 800) && (CCAP_FallTime <= 2500)){if(++PPM1_RxCnt >= 5) PPM1_RxCnt = 5; //连续接收到5个脉冲if(PPM1_RxCnt == 5){if(!B_PPM1_OK){PPM1_Cap = CCAP_FallTime;B_PPM1_OK = 1; //标志收到一个脉冲PPM1_Rx_TimerOut = 12; //限时收不到脉冲}}}}PPM1_Rise_TimeOut = 0;}}if(CCF1) //PCA模块1中断{CCF1 = 0; //清PCA模块1中断标志if(P16) //上升沿{CCAP1_RiseTime = ((u16)CCAP1H << 8) + CCAP1L; //读CCAP1PPM2_Rise_TimeOut = 1; //收到上升沿, 高电平限时}else //下降沿{CCAP_FallTime = ((u16)CCAP1H << 8) + CCAP1L; //读CCAP1if((PPM2_Rise_TimeOut != 0) && (PPM2_Rise_TimeOut < 3)) //收到过上升沿, 高电平也没有溢出{CCAP_FallTime = (CCAP_FallTime - CCAP1_RiseTime) >> 1; //为了好处理, 转成单位为usif((CCAP_FallTime >= 800) && (CCAP_FallTime <= 2500)){if(++PPM2_RxCnt >= 5) PPM2_RxCnt = 5;if(PPM2_RxCnt == 5){if(!B_PPM2_OK){PPM2_Cap = CCAP_FallTime;B_PPM2_OK = 1; //标志收到一个脉冲PPM2_Rx_TimerOut = 12; //限时收不到脉冲}}}}PPM2_Rise_TimeOut = 0;}}if(CCF2) //PCA模块2中断{CCF2 = 0; //清PCA模块1中断标志if(P15) //上升沿{CCAP2_RiseTime = ((u16)CCAP2H << 8) + CCAP2L; //读CCAP2PPM3_Rise_TimeOut = 1; //收到上升沿, 高电平限时}else //下降沿{CCAP_FallTime = ((u16)CCAP2H << 8) + CCAP2L; //读CCAP2if((PPM3_Rise_TimeOut != 0) && (PPM3_Rise_TimeOut < 3)) //收到过上升沿, 高电平也没有溢出{CCAP_FallTime = (CCAP_FallTime - CCAP2_RiseTime) >> 1; //为了好处理, 转成单位为usif((CCAP_FallTime >= 800) && (CCAP_FallTime <= 2500)){if(++PPM3_RxCnt >= 5) PPM3_RxCnt = 5;if(PPM3_RxCnt == 5){if(!B_PPM3_OK){PPM3_Cap = CCAP_FallTime;B_PPM3_OK = 1; //标志收到一个脉冲PPM3_Rx_TimerOut = 25; //限时收不到脉冲YM_LostCnt = 0;Lost16S = 0;}}}}PPM3_Rise_TimeOut = 0;}}if(CCF3) //PCA模块3中断{CCF3 = 0; //清PCA模块1中断标志if(P14) //上升沿{CCAP3_RiseTime = ((u16)CCAP3H << 8) + CCAP3L; //读CCAP3PPM4_Rise_TimeOut = 1; //收到上升沿, 高电平限时}else //下降沿{CCAP_FallTime = ((u16)CCAP3H << 8) + CCAP3L; //读CCAP3if((PPM4_Rise_TimeOut != 0) && (PPM4_Rise_TimeOut < 3)) //收到过上升沿, 高电平也没有溢出{CCAP_FallTime = (CCAP_FallTime - CCAP3_RiseTime) >> 1; //为了好处理, 转成单位为usif((CCAP_FallTime >= 800) && (CCAP_FallTime <= 2500)){if(++PPM4_RxCnt >= 5) PPM4_RxCnt = 5;if(PPM4_RxCnt == 5){if(!B_PPM4_OK){PPM4_Cap = CCAP_FallTime;B_PPM4_OK = 1; //标志收到一个脉冲PPM4_Rx_TimerOut = 12; //限时收不到脉冲}}}}PPM4_Rise_TimeOut = 0;}}// if(CF) //PCA溢出中断
// {
// CF = 0; //清PCA溢出中断标志
// }}
六、完整工程、原理图文件获取
点击下载:基于STC51:四轴飞控开源项目原理图与源码(入门级DIY).rar