【ENVI入门系列】15.遥感动态监测
目录
遥感动态监测
- 动态检测概述
- ENVI中的动态检测工具
- 详细操作步骤
3.1 图像直接比较法
3.2 分类后比较法
3.3 流程化动态监测工具
3.3.1 Image Change Workflow直接比较法工具
3.3.2 Thematic Change Workflow分类后比较法工具**
1、 动态检测概述
很多人对动态监测和动态检测两个名词有疑惑。我们可以这样理解,动态监测是一个广义的名词,泛指数据预处理、变化信息发现与提取、变化信息挖掘与应用等,以对整个流程的叙述。动态检测是一个狭义的名词,主要指部分数据预处理、变化信息发现与提取。在一定的意义和场合上讲,两个词的意思是一样的。当然很多地方把这两个词说成变化监测和变化检测。
遥感动态检测就是从不同时期的遥感数据中,定量地分析和确定地表变化的特征与过程。它涉及到变化的类型、分布状况与变化量,即需要确定变化前后的地面类型、界线及变化趋势,能提供地物的空间分布及其变化的定性和定量信息。
目前,遥感变化检测技术大多是针对两个时相的遥感影像进行操作。根据处理过程来分,遥感变化检测方法可分为三类:
图像直接比较法
图像直接比较法是最为常见的方法,它是对经过配准的两个时相遥感影像中像元值直接进行运算和变换处理,找出变化的区域。目前常用的光谱数据直接比较法包括图像差值法、图像比值法、植被指数比较法、主成分分析法、光谱特征变异法、假彩色合成法、波段替换法、变化矢量分析法、波段交叉相关分析以及混合检测法等。
分类后比较法
分类后结果比较法是将经过配准的两个时相遥感影像分别进行分类,然后比较分类结果得到变化检测信息。虽然该方法的精度依赖于分别分类时的精度和分类标准的一致性,但在实际应用中仍然非常有效;
直接分类法
结合了图像直接比较法和分类后结果比较法的思想,常见的方法有:多时相主成分分析后分类法、多时相组合后分类法等。
当然,检测方法远不止这些。以上变换检测方法大多只是变化信息的发现,还有一个过程是变化信息的提取,由以下方法供选择:
手工数字化法
屏幕数字化
区域生长法
图像自动分类
监督分类
非监督分类
面向对象的特征提取法
图像分割
手工阈值分割
自动阈值分割
组合法
值得我们注意的是,上述检测方法和信息提取方法不能说哪个绝对的好与坏,只能是根据不同的数据源和不同的应用需求选用适合的方法。
-
ENVI中的动态检测工具
ENVI集成了部分动态检测方法,包括图像直接比较法、分类后比较法、PCA变换、Two-Color Multiview、MNF变换法、ICA变换法、波谱角检测方法。当然还可以自定义方法。ENVI5.1中变化监测工具放在/Change Detection中,包括五个工具:
(1) /Change Detection/Change Detection Difference:使用图像直接比较法对两时相影像做差值或者比值运算,对差值或者比值结果划分为若干类。整合了一些预处理功能,如数据值归一化和单位的统一。
(2) /Change Detection/Change Detection Statistics:使用分类后比较法比较两时相影像分类结果,获得变化类型、面积、百分比等变化矩阵信息,同时可得到一个多波段的变化图像,每个波段表示一种土地类型的变化情况。
(3) /SPEAR/SPEAR Change Detection:包括很多的变化监测方法和预处理功能。提供了四大类方法,包括Two-Color Multiview、图像变换( PCA、MNF和ICA变换)、图像波段直接比较法和波谱角检测方法。
(4) /Change Detection/Image Change Workflow:包括很多的变化监测方法和预处理功能。主要有波段差值、特征差值、波谱角、PCA /MNF/ICA。
(5) /Change Detection/Thematic Change Workflow:使用分类后比较法比较两时相影像分类结果,获得变化类型、面积、百分比等变化矩阵信息,同时可得到一个单波段的变化分类图像和变化矢量结果。
本课程以两个例子数据,学习直接比较法和分类后比较法的基本流程,同时学习ENVI中的四个主要的变化监测工具。
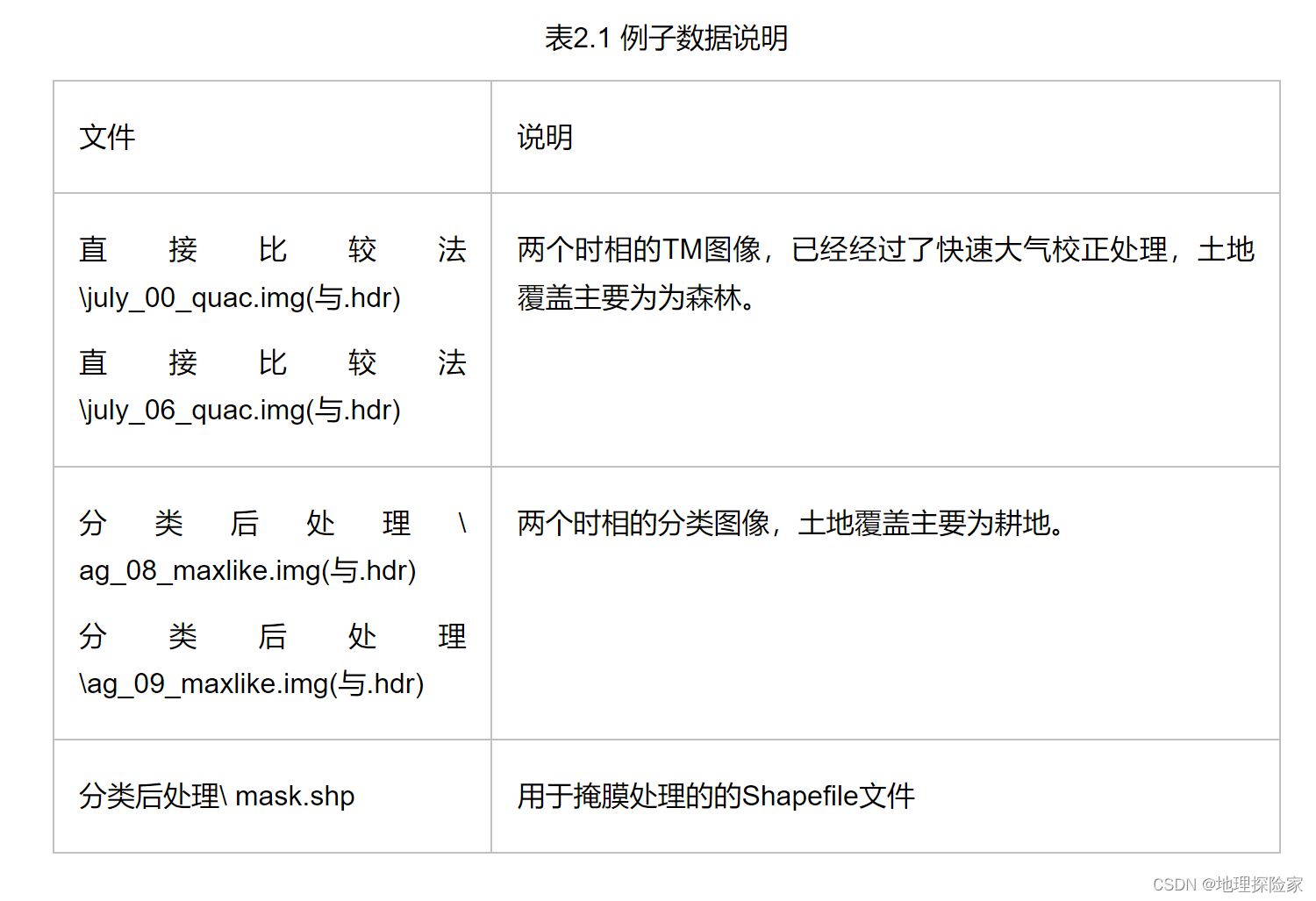
例子数据情况如下表:
-
详细操作步骤
3.1 图像直接比较法
ENVI中的图像直接比较法就是对两时相影像做差值或者比值运算,整合了一些预处理功能,如数据值归一化和单位的统一。下面以经过配准的两时相影像为例介绍这个功能的使用。
(1) 将两时相影像同时打开,july_00_quac.img和july_06_quac.img。
(2) 在Toolbox中,单击/Change Detection/Change Detection Difference Map,分别选择前一时相影像july_00_quac.img一个波段,这里选择第四波段,选择后一时相影像july_06_quac.img的一个波段,这里选择第四波段。
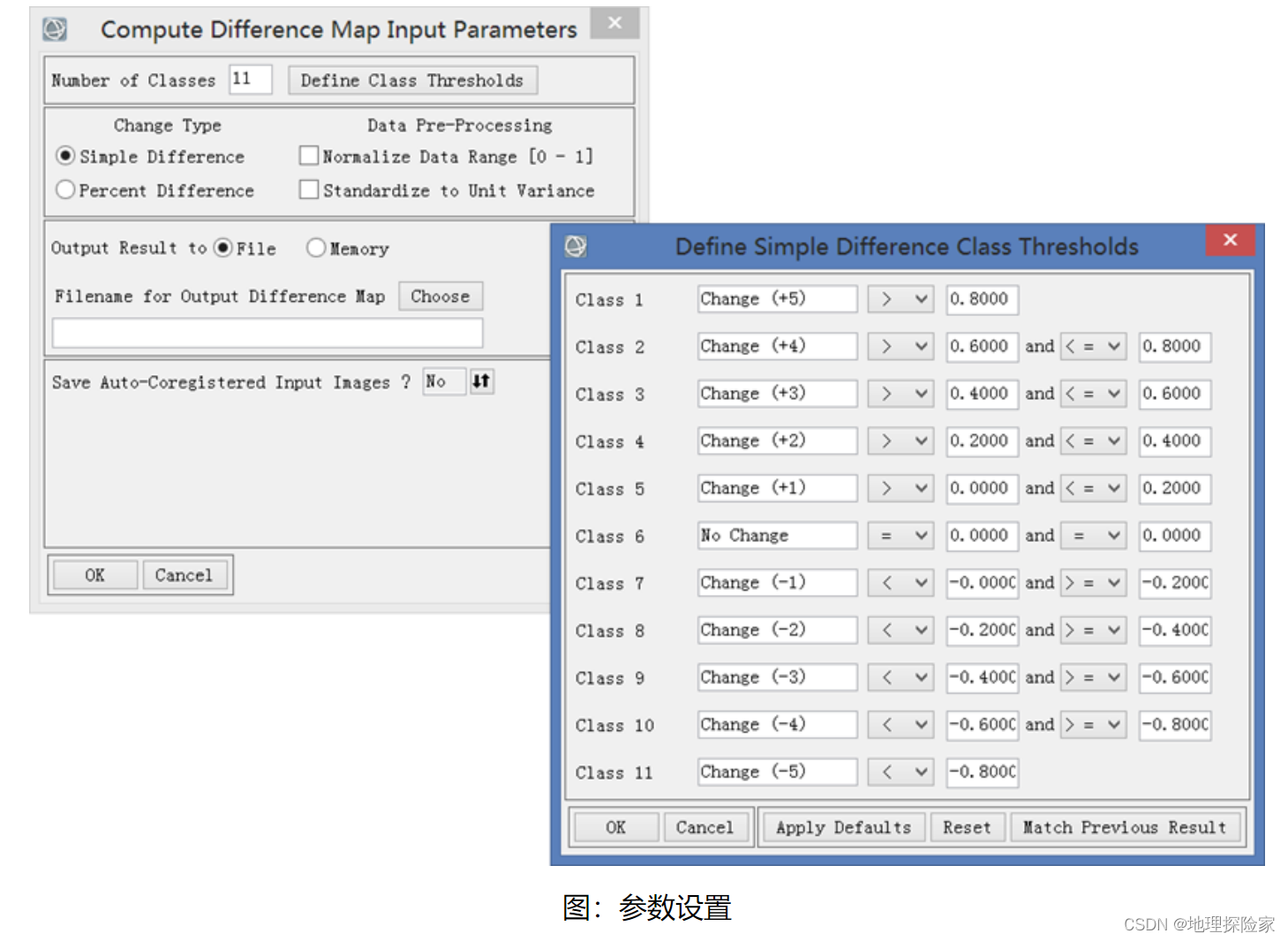
(3) 在Compute Difference Map Input Parameters面板中。
计算方法(Change Type):求差(Simple Difference)和百分比(Percent Difference)。
数据归一化(0-1)(Normalization)和单位统一(Standardization)。
设置变化等级,单击Define Class Thresholds按钮,可以对每一个变化范围进行划分以及设置变化等级划分阈值。
(4) 选择一个路径输出。
(5) 结果查看和统计。显示结果,在ToolBox中,打开/Classification/Post Classification/Class Statistics,统计各个变化。

3.2 分类后比较法
ENVI中的分类后比较法是通过比较两时相影像分类结果,获得变化类型、面积、百分比等。下面介绍这个工具的使用。
(1) 打开两个时相的分类结果图ag_08_maxlike.img和ag_09_maxlike.img。
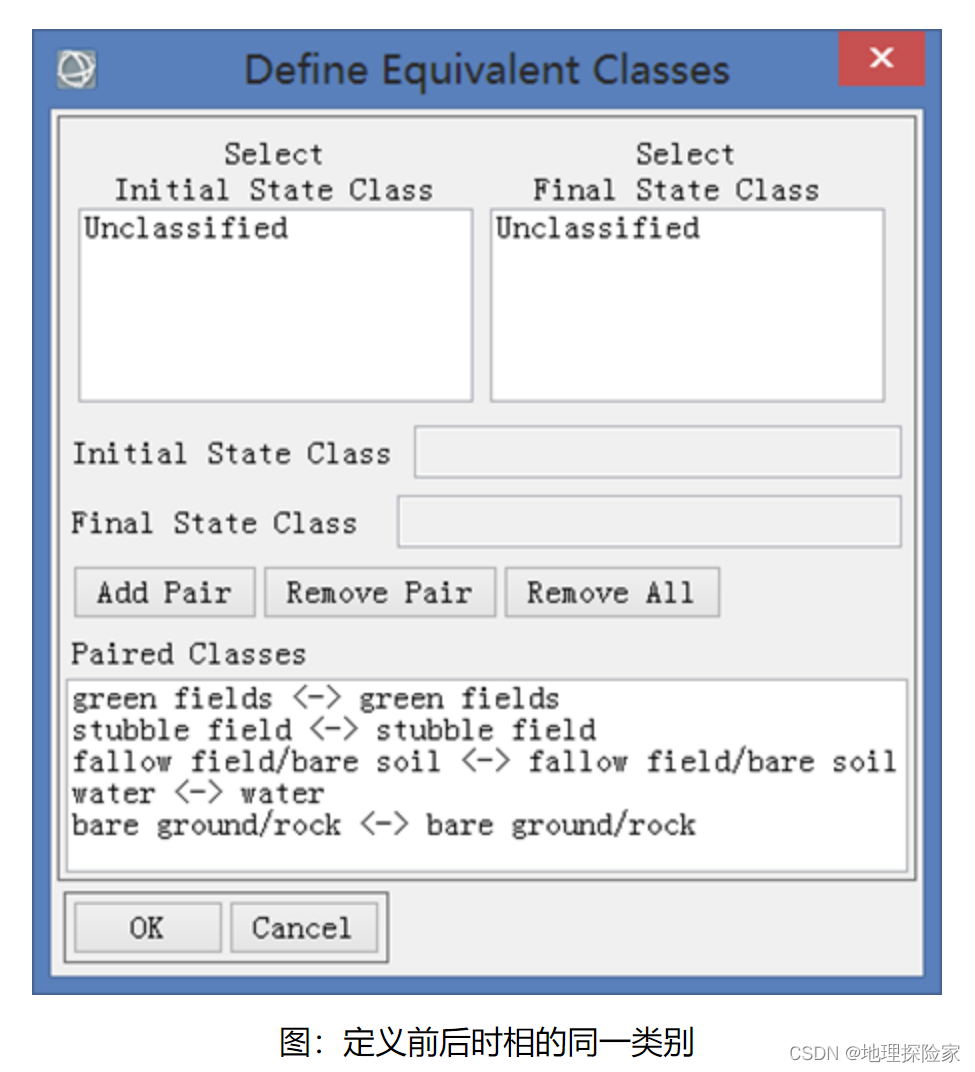
(2) 在Toolbox中,打开/Change Detection/Change Detection Statistics,选择ag_08_maxlike.img作为前时相分类图(Initial State),ag_09_maxlike.img作为后时相分类图(Final State)。
(3) 在Define Equivalent Class面板中,如果两个时相的分类图命名规则一致,则会自动将两时相上的类别关联;否则需要在Initial State Class和Final State Class列表中手动选择相对应的类别,点击Ok按钮。
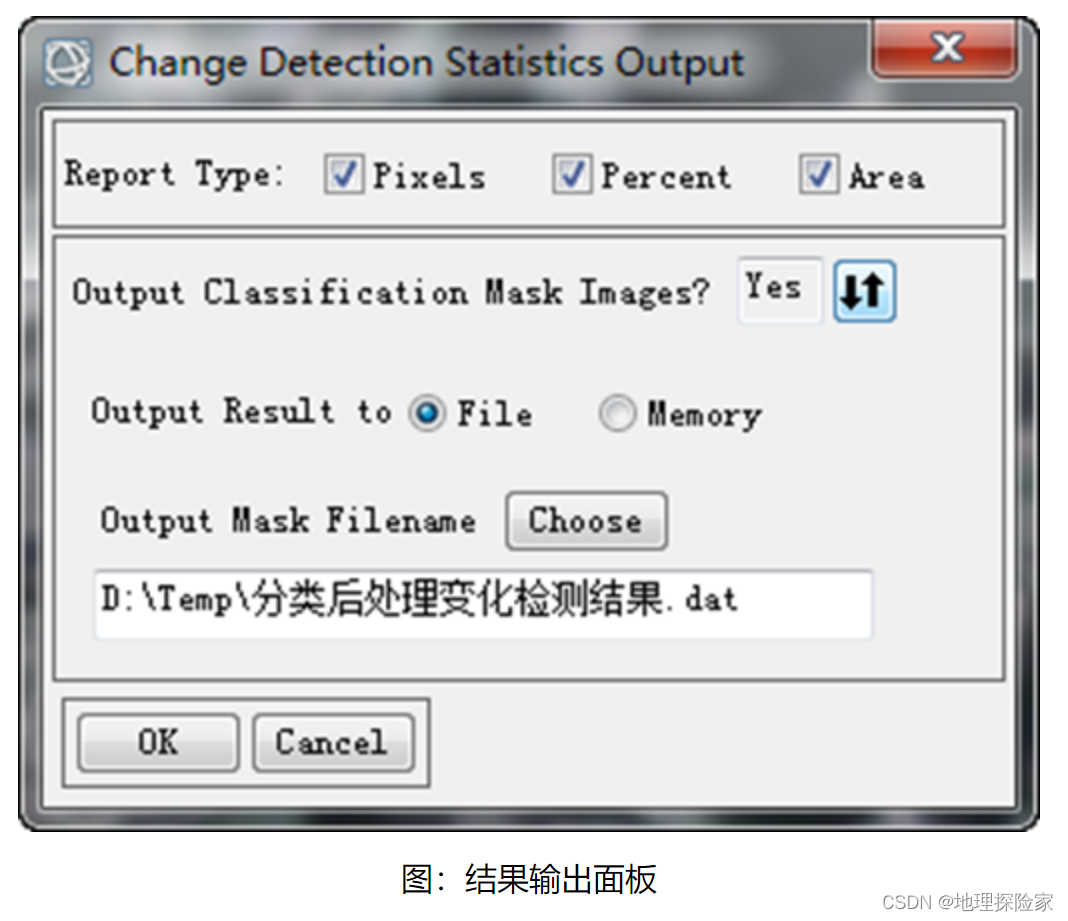
(4) 在结果输出面板中,选择统计类型:像素(Pixels)、百分比(Percent)和面积(Area),选择路径输出结果。
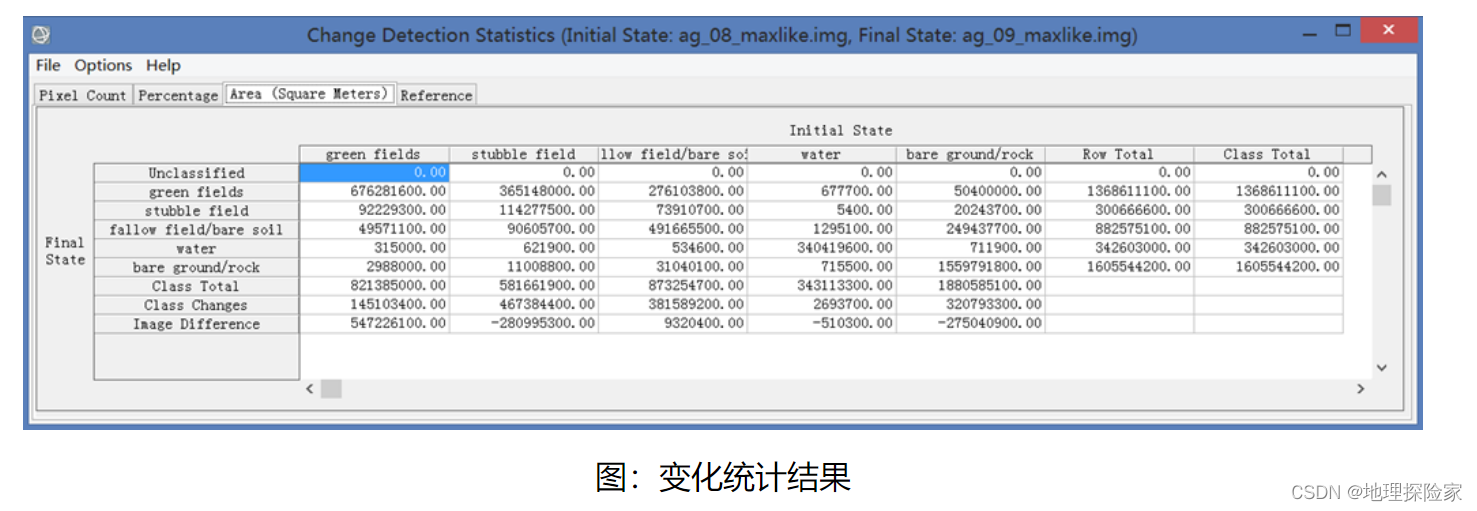
(5) 结果以二维表格和图像形式展现,如下图所示。
3.3 流程化动态监测工具
ENVI包含两个流程化的动态监测工具,集成了影像配准和变化信息发现过程等,分为直接比较法流程化工具Image Change Workflow和分类后比较法流程化工具Thematic Change Workflow。
3.3.1 Image Change Workflow直接比较法工具
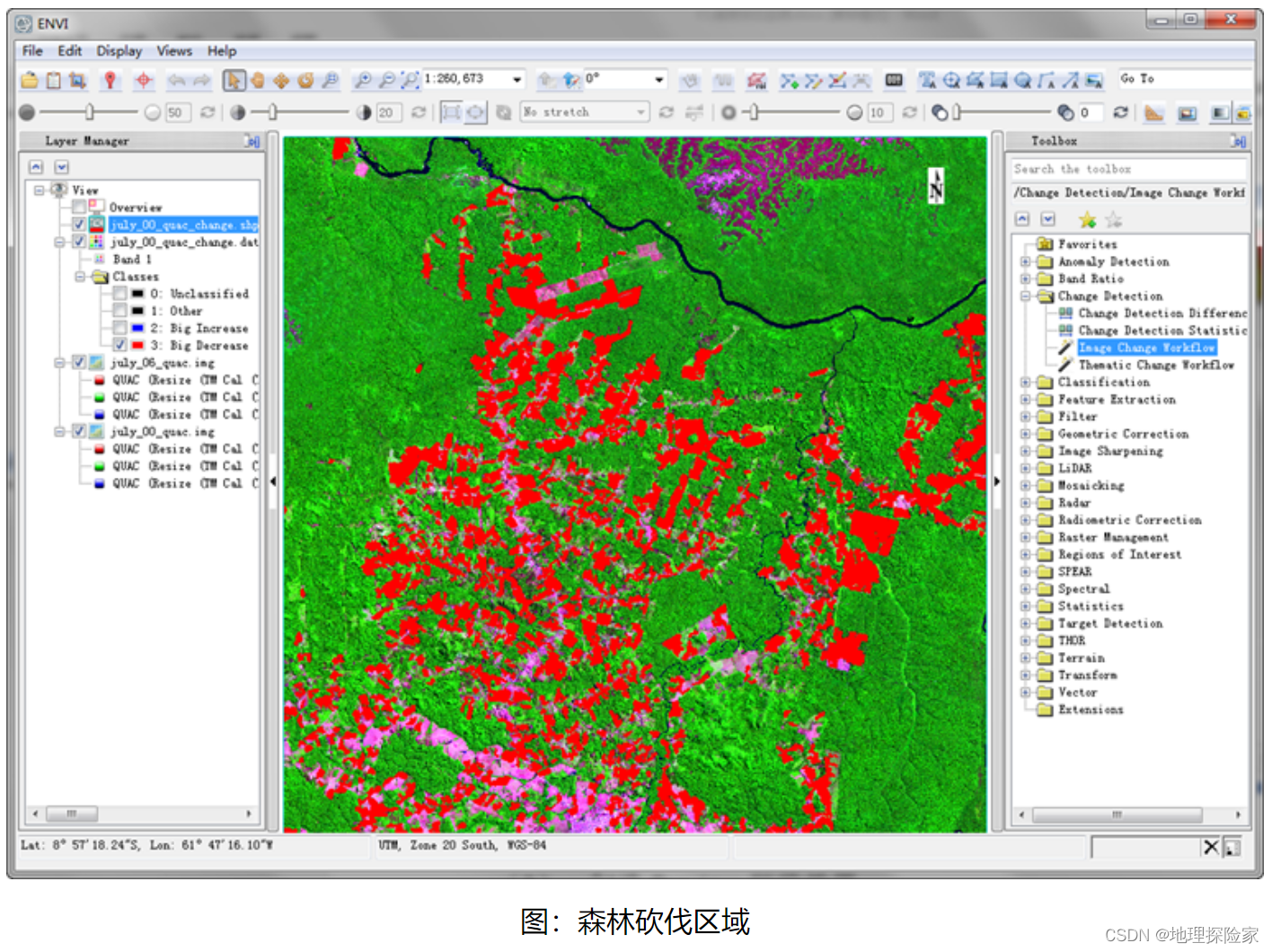
Image Change Workflow工具可以检测两个时相影像中增加和减少两种变化信息,适合获取地表绝对变化信息。下面以两个时相的TM影像为数据源,影像覆盖区是林木采伐区,利用Image Change Workflow工具提取森林开采区域。两个TM影像已经经过大气校正(快速大气校正——QUAC)和精确几何配准。
第一步、启动Image Change Workflow
(1) 在ENVI中,选择File->Open打开 “july_00_quac.img” 和 “july_06_quac.img” 两个影像。工具条上的透视窗
提供了几种透视查看多景影像的方式,选择任一种,查看两景影像的配准情况及变化信息
(2) 在Toolbox列表中,双击/Change Detection/Image Change Workflow,打开File Selection对话框,分别为Time1 File选择july_00_quac.img和Time File2选择july_06_quac.img。单击Next按钮打开Image Co-Registration 面板。
(3) 直接单击Next,跳过图像配准步骤。
注:切换Input Mask面板,可以选择一个掩膜文件提高精度,如这里可以制作一个林区的掩膜文件,排除非林区的干扰。掩膜文件可以是单波段栅格图像或者多边形shapefile文件。
第二步、变化信息检测
在Change Method Choice 面板中,提供两种方法:图像差值法和图像变换法。选择Image Difference方法单击Next。
图像插值法又提供了三种方法:
-
波段差值
选择Input Band并选择相应的波段。切换到Advanced,提供辐射归一化(Radiometric Normalization)选项,可以将两个图像近似在一个天气条件下成像(以Time1图像为基准)。
-
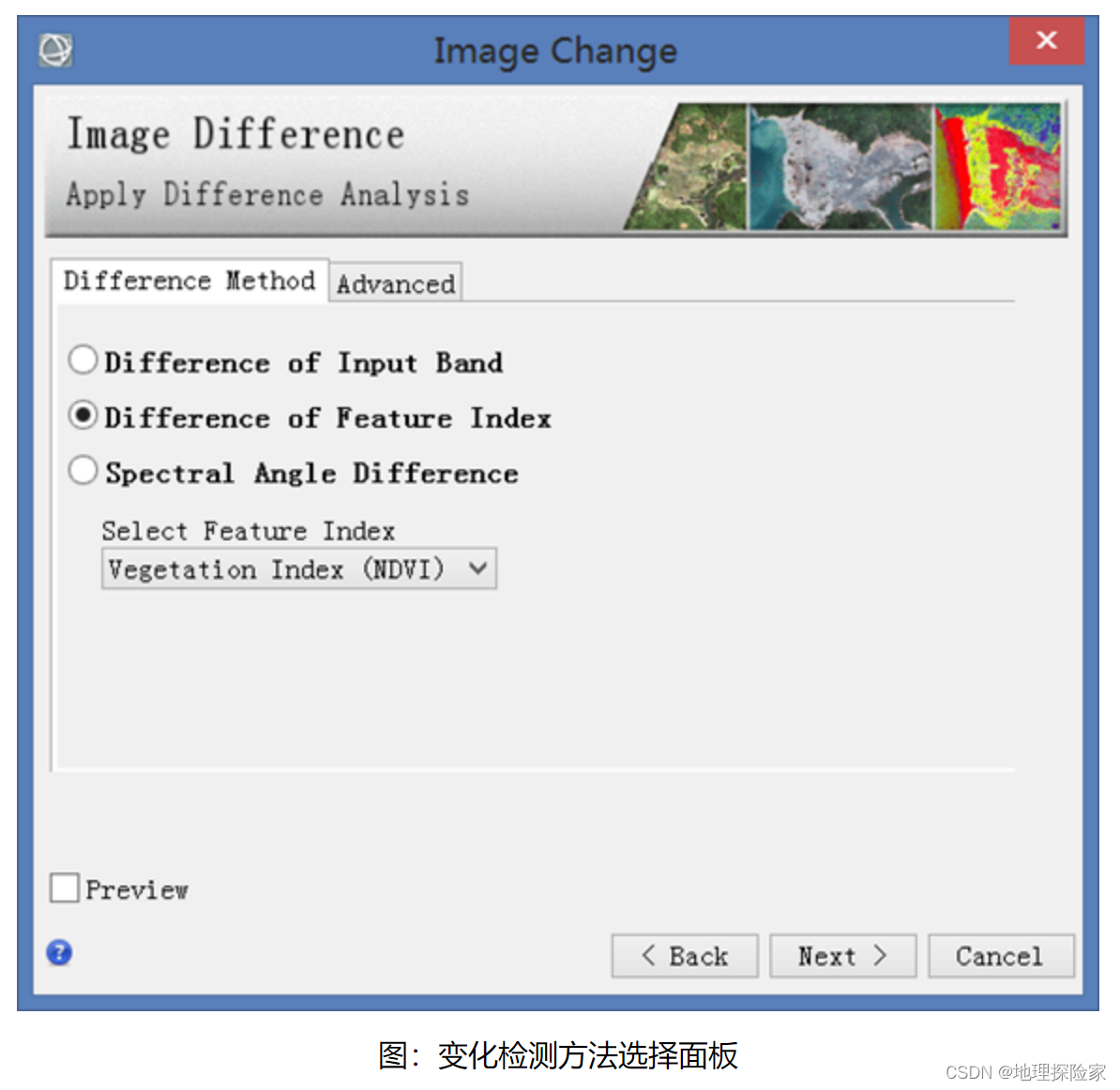
特征指数差
这个方法要求数据是多光谱或者高光谱,自动根据图像信息(波段数和中心波长信息)在Select Feature Index列表中可以选择的特征指数。提供四种特征指数:
Vegetation Index (NDVI): 归一化植被指数。
Water Index (NDWI): 归一化水指数,水体区域NDWI值大。
Built-up Index (NDBI): 归一化建筑物指数。建筑物区域NDBI值大。
Burn Index: 燃烧指数。燃烧区域值大。
切换到Advanced,自动为Band1和Band2选择相应的波段(前提是有中心波长信息),否则手动选择。
(1) 选择Feature Index,在Select Feature Index列表中选择Vegetation Index (NDVI)。
(2) 勾选Preview选项,可以预览变化信息检测的结果,红色区域表示为NDVI减少,蓝色区域表示NDVI增加。
(3) 单击Next打开Choose Thresholding or Export面板,提供两种方法:
Apply Thresholding:设置阈值细分变化信息图像。
Export Image Change Only:直接输出变化信息图像。
选择Apply Thresholding,单击Next打开Change Thresholding面板。
第三步、变化信息提取
选择Apply Thresholding,点击Next,可以从变化信息检测结果中提取三种变化信息:
Increase and Decrease:增加 (蓝色) 和减少(红色)变化信息
Increase Only:增加 (蓝色)变化信息
Decrease Only:减少(红色)变化信息
提供两种阈值设置方法:
-
Auto-Thresholding
提供四种算法自动获取分割阈值:
Otsu’s: 基于直方图形状的方法。使用直方图积累区间来划分阈值。
Tsai’s: 基于力矩的方法。
Kapur’s: 基于信息熵的方法。
Kittler’s: 基于直方图形状的方法。把直方图近似高斯双峰从而找到拐点。
切换到Manual查看获取的分割阈值,可以手动更改,勾选Preview预览分割效果。
-
Manual(手动设置阈值)
(1) 在Select Change of Interest列表中选择Decrease Only,获取森林减少区域。
(2) 在Select Auto-Thresholding Method列表中选择Otsu’s。
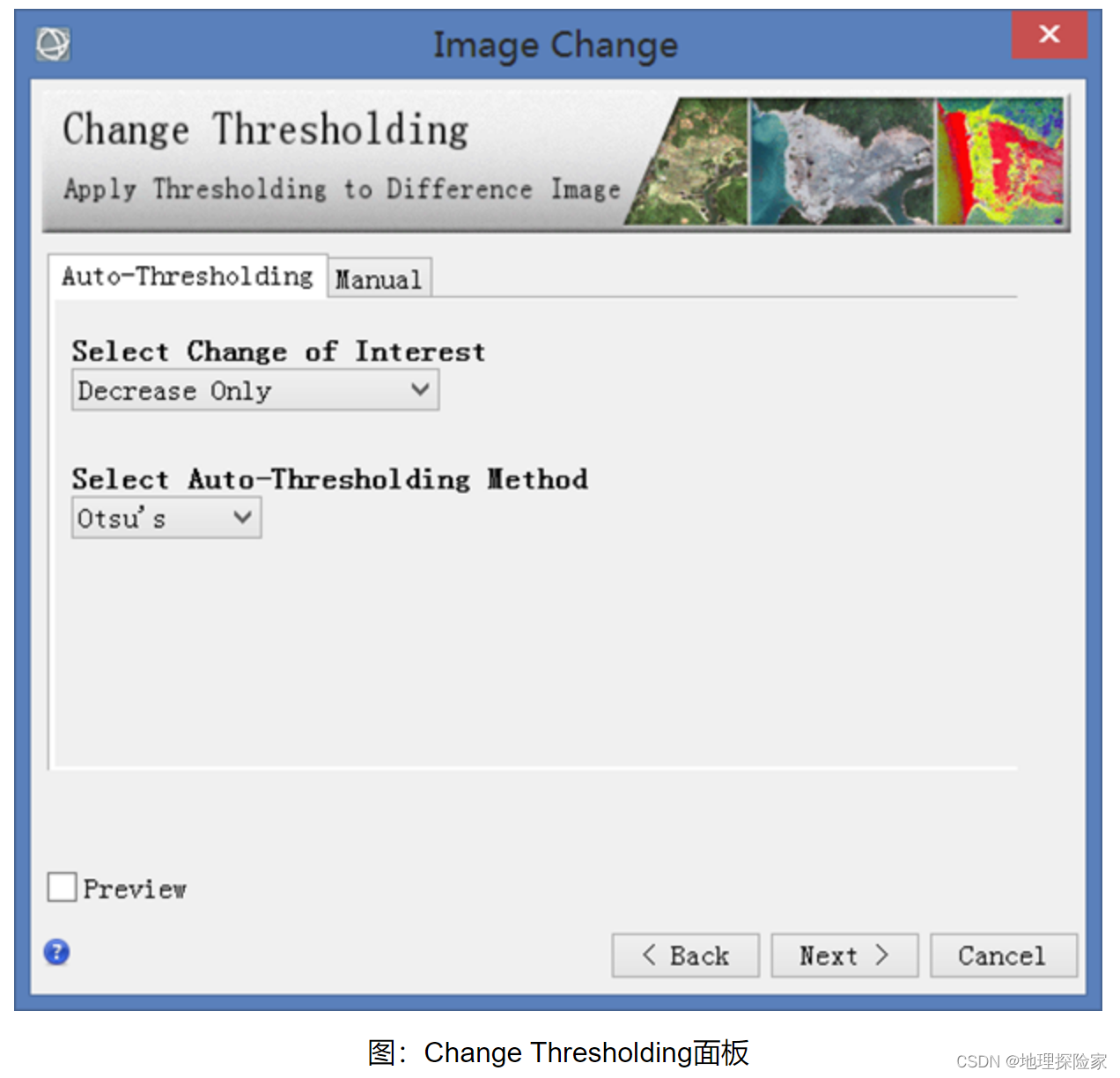
(3) 勾选Preview预览效果。
(4) 单击Next打开Cleaning Up Change Detection Results面板。这个面板的作用是移除椒盐噪声和去除小面积斑块。
勾选Enable Smoothing ,平滑核(Smooth Kernel Size):3,值越大,平滑尺度越大。
勾选Enable Aggregation,最小聚类值(Aggregate Minimum Size):30。
(5) 勾选Preview预览效果,单击Next打开Exporting Image Change Change Detection Results面板。
第四步、输出变化信息
可以输出四种结果或格式:
以图像格式输出变化结果
以矢量格式输出变化结果
变化统计文本文件
输出差值图像
(1) 勾选Export Change Class Vectors,选择输出为Shapefile格式。
(2) 切换到Additional Export,勾选Export Change Class Statistics,输出统计文件。
(3) 单击Finish输出结果。
输出结果自动叠加显示在ENVI中,统计文件中包括了减少面积,即森林采伐面积。
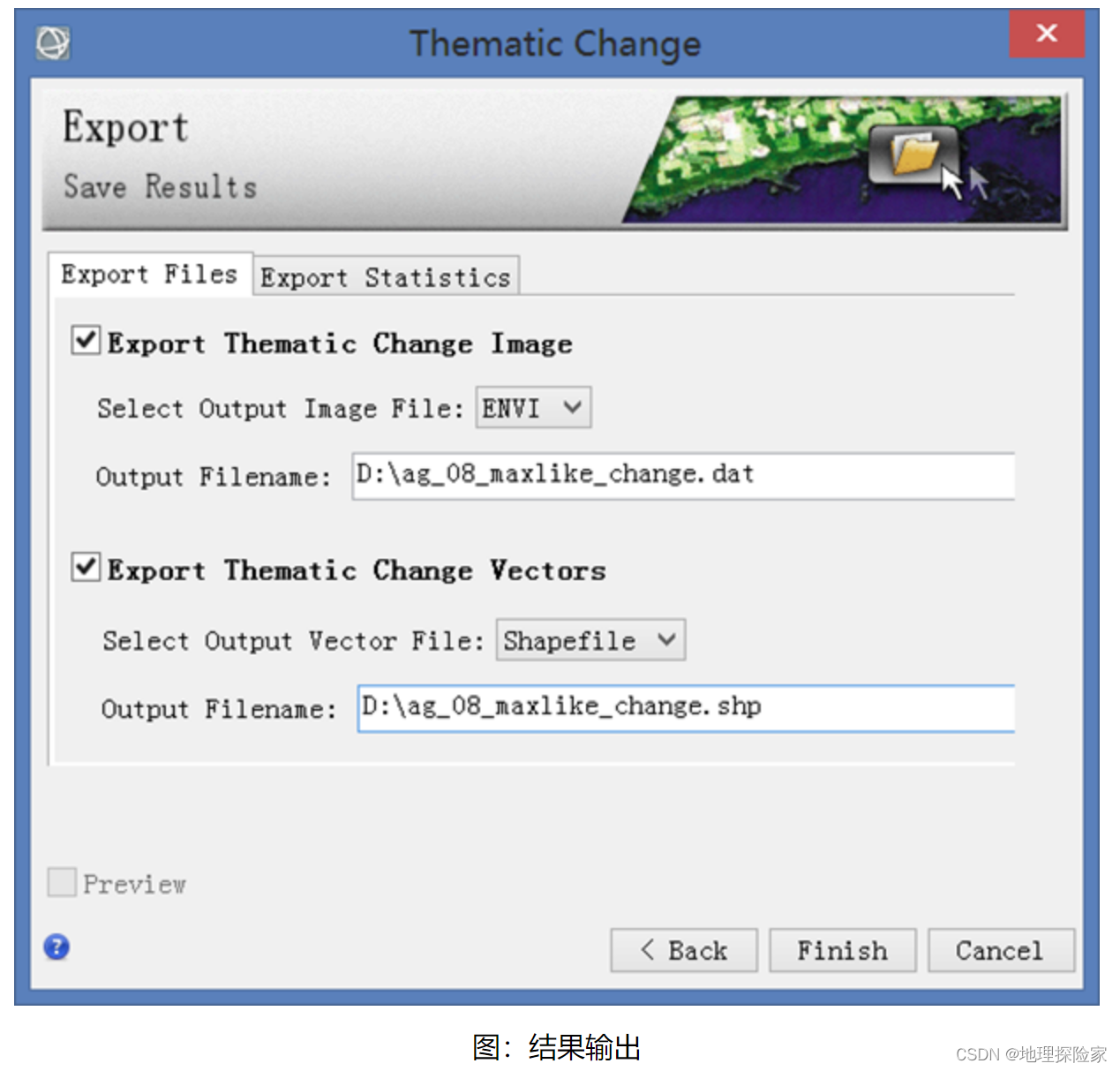
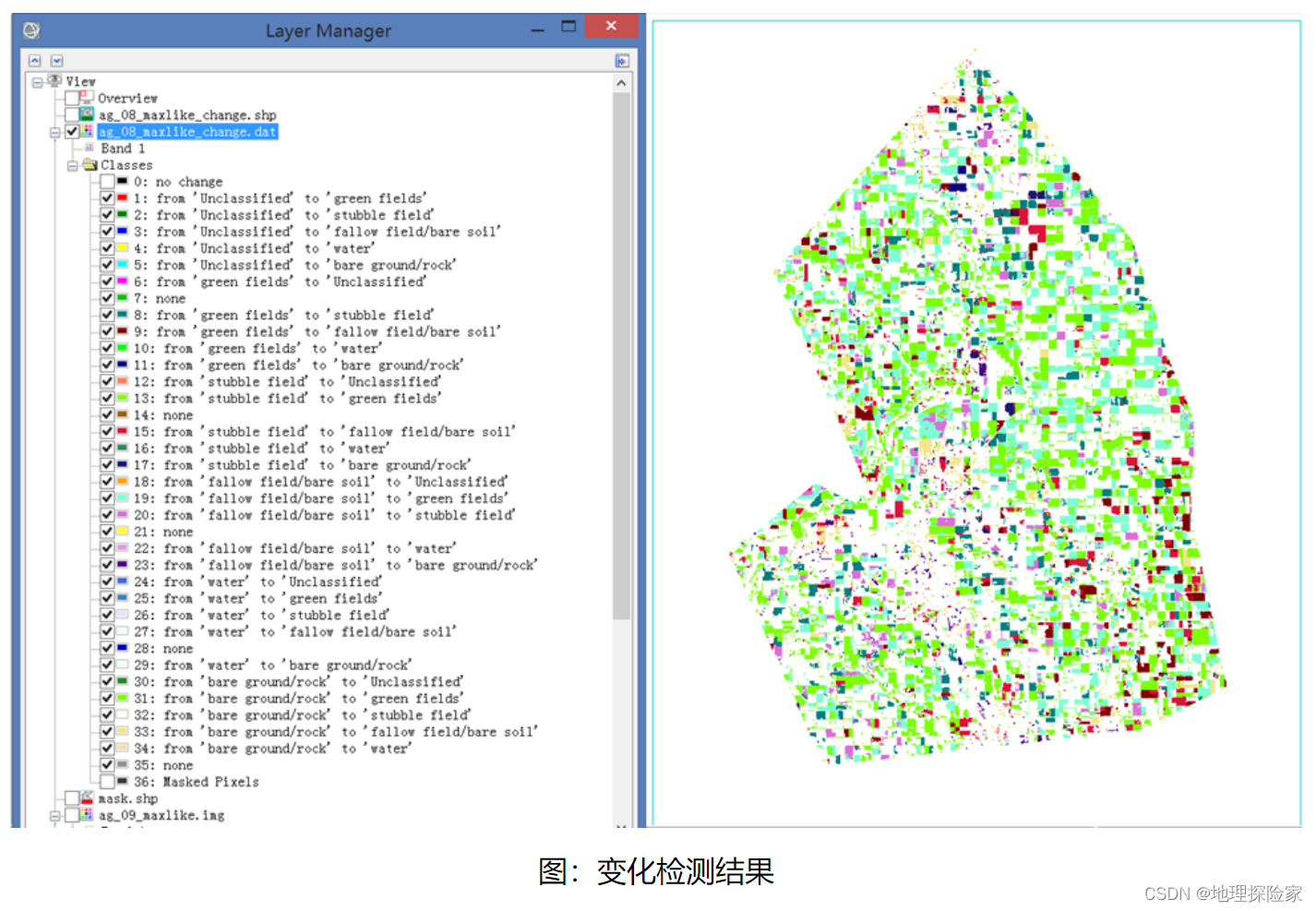
3.3.2 Thematic Change Workflow分类后比较法工具
下面是利用2008年7月和2009年7月的Landsat TM来监测农业用地的利用情况。数据经过精确几何校正、传感器定标和快速大气校正(Quick Atmospheric Correction)、监督分类处理。
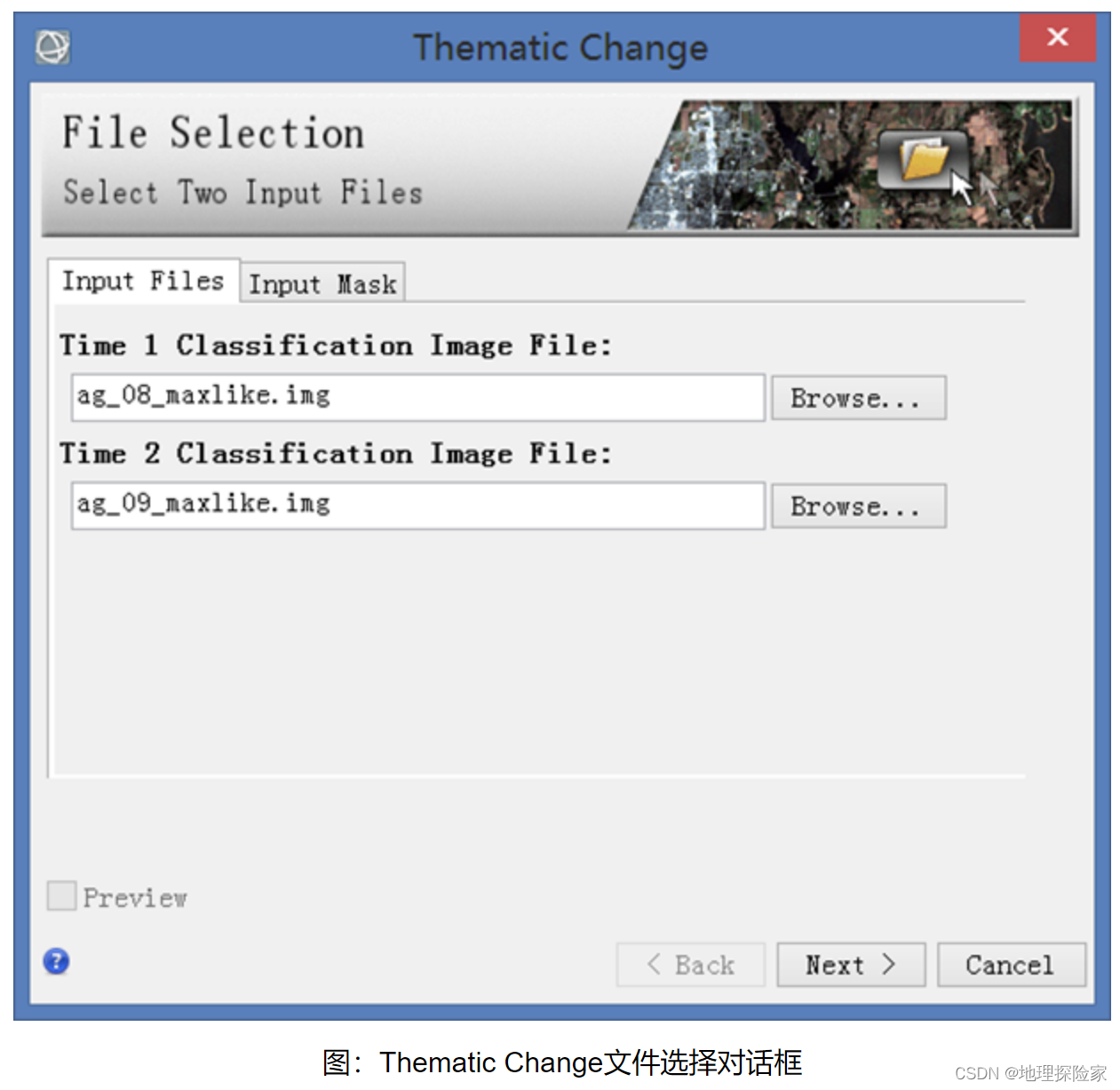
(1) 打开ag_08_maxlike.img和ag_09_maxlike.img。
(2) 在Toolbox中,打开/Change Detection/Thematic Change Workflow,在Thematic Change 面板中,分别为Time1 Classicfication Image File选择ag_08_maxlike.img和Time2 Classicfication Image File选择ag_09_maxlike.img,
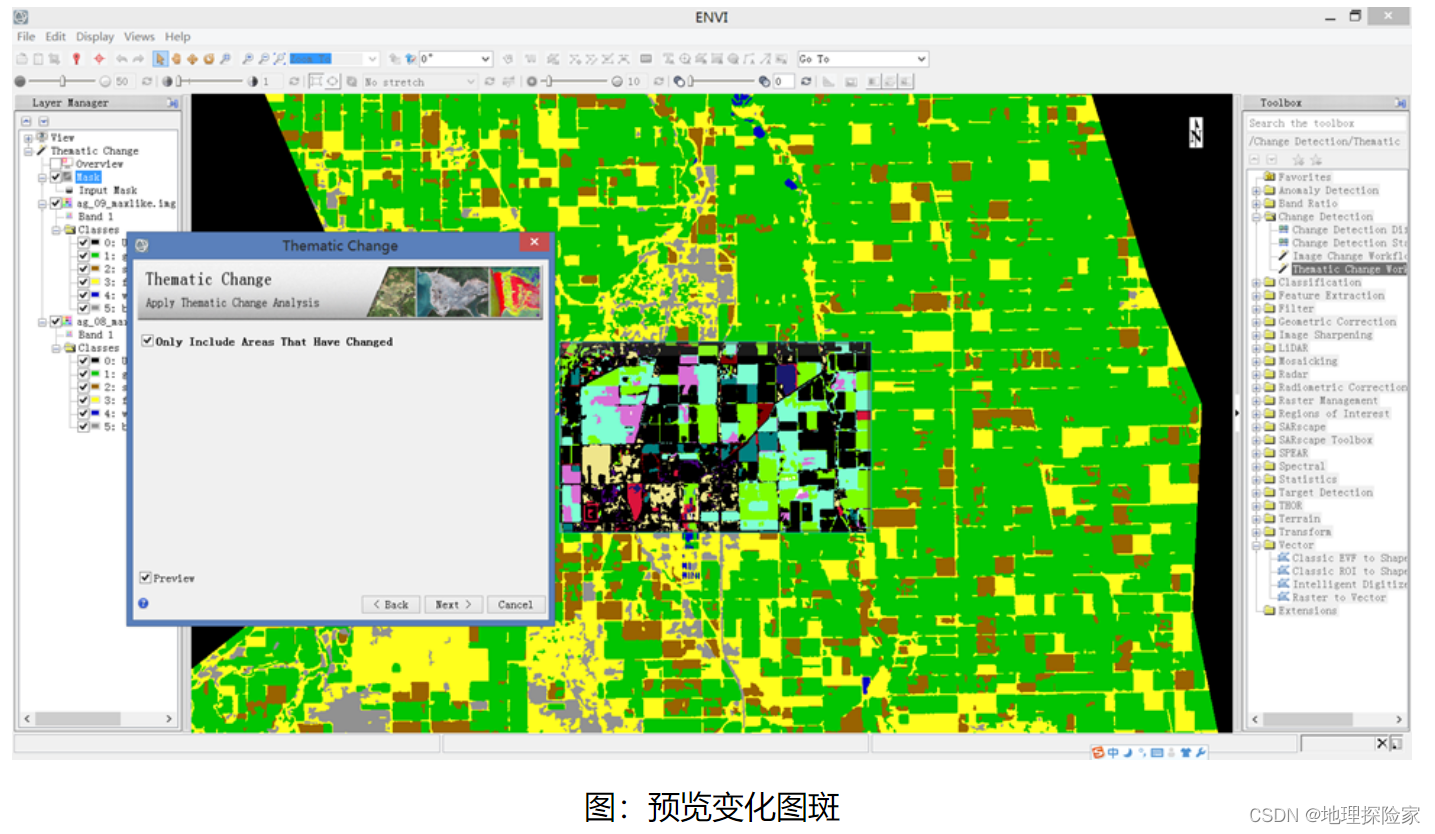
(3) 选择Input Mask选项,在The Thematic Change Mask 对话框中,选择mask.shp文件作为掩膜文件,单击Next按钮。
(4) 在Thematic Change对话框中,只选择"Only Include Areas That Have Changed",只获得变化的区域。选择Preview选项,可以预览结果。单击Next按钮。
(5) 在Smoothing和Aggregation中设置合适的值去除噪声和合并小斑块,在这里按照默认,平滑核为3,最小聚类值为9,单击Next按钮进入下一步。
(6) 在Thematic Change Export对话框中,分别将结果以图像和矢量格式输出,还可以输出变化统计文件。