舵机控制
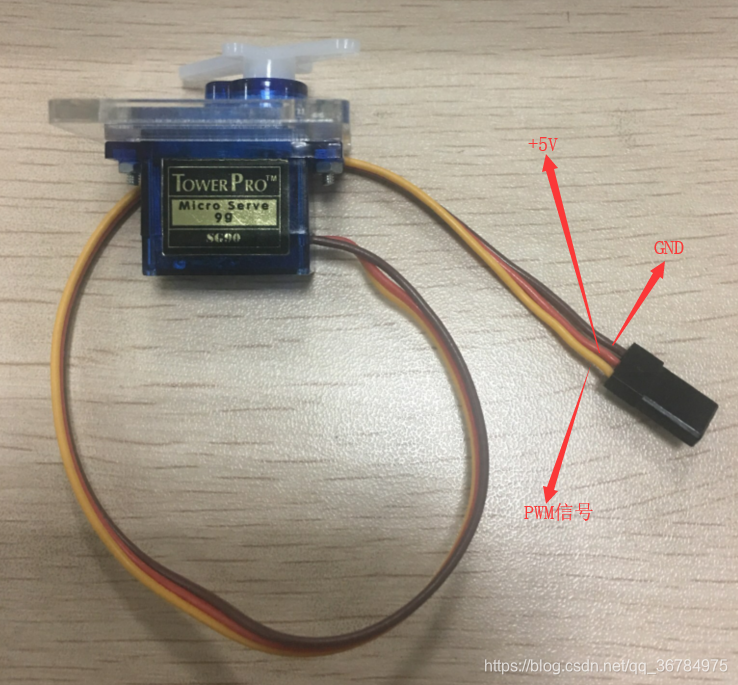
型号:SG90

接线
黄线:信号线
红线:电源线
棕线:地线
PWM周期
需要通过信号线往舵机输入PWM波,才能驱动舵机转动
PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
以下是一个周期内高电平所占的时间:
0.5ms————0度; 2.5% 对应函数中占空比为250
1.0ms————45度; 5.0% 对应函数中占空比为500
1.5ms————90度; 7.5% 对应函数中占空比为750
2.0ms————135度; 10.0% 对应函数中占空比为1000
2.5ms————180度; 12.5% 对应函数中占空比为1250
定时器可设置为500us,即0.5ms,通过中断处理函数的count++可以得到0.5ms倍数的周期时间,那么定时20ms = 0.5ms*40,count ==40即一个周期,再通过设置比较值得到不同的占空比
程序
#include <REGX52.H>
#include "Timer0.h"
sbit Sg90_com = P1^0;
unsigned char compare,count; //compare比较值控制占空比大小,控制舵机转动的角度void Delay1ms(unsigned int num) //@11.0592MHz
{unsigned char i, j;while(num--){i = 2;j = 199;do{while (--j);} while (--i);}
}
void main()
{Timer0Init();while(1){compare = 1; //0度Delay1ms(2000);compare = 2; //45度Delay1ms(2000);compare = 3; //90度Delay1ms(2000); compare = 4; //135度Delay1ms(2000); compare = 5; //180度Delay1ms(2000); }
}void Timer0_Rountine() interrupt 1 //每次定时器溢出时是0.5ms
{TL0 = 0x33;TH0 = 0xFE;count++;//PWM控制if(count < 40) //每一个0.5mscount都会++,加了40次就20ms,是舵机控制的一个周期{if(count < compare) //通过比较值控制高电平占据周期的时间,也就是占空比大小{Sg90_com = 1;}else{Sg90_com = 0;}}else //count加到40后清零{count = 0;Sg90_com = 1;}
}
注意
定时器的的中断处理函数不一定要放到main.c文件中,也可以放到其他的文件,处理函数要用到变量可以在对应文件中声明,如果该变量要在main函数中改变的,如PWM控制的compare比较值,可以在main.c文件的开头声明该变量,用extern关键字,告诉编译器compare变量虽然在main.c文件中被改变了,但不是在main.c文件中定义的,该定义在别的文件中,去别的文件找
extern unsigned char compare;