-
1.astra pro深度摄像头介绍
-
2.astra pro驱动安装
-
3.astra pro获取深度图像 无色彩pointCloud2
-
4.astra pro获取彩色图像 带彩色的pointCloud2
1.astra pro深度摄像头介绍


摄像头有四个镜头,从左到右的镜头分别是1 ir发射源 2 最小距离传感器 3 彩色摄像头 4 ir接收器
2.astra pro驱动安装
2.1下载驱动及依赖
ubuntu16 kinetic及ubuntu18 melodic下载以下驱
OpenNI-Linux-x64-2.3.tar.bz2
$sudo apt-get install build-essential freeglut3 freeglut3-dev
$ldconfig -p | grep libudev.so.1
$cd /lib/x86_64-linux-gnu
$sudo ln -s libudev.so.x.x.x libudev.so.1
2.2编译驱动
解压下载的OpenNI-Linux-x64-2.3驱动
$ cd OpenNI-Linux-x64-2.3
$ sudo chmod a+x install.sh- 安装
$ sudo chmod a+x install.sh
$ sudo ./install.sh插拔摄像头,source环境
$ source OpenNIDevEnvironment
- 编译
$ cd Samples/SimpleViewer
$ make- 连接设备,执行示例
$ cd Bin/x64-Release
$ ./SimpleViewer
编译安装libuvc
$ cd ~
$ git clone https://github.com/ktossell/libuvc
$ cd libuvc
$ mkdir build
$ cd build
$ cmake ..
$ make && sudo make install
$ sudo cp /usr/include/libusb-1.0/libusb.h /usr/local/include/libuvc/
2.3 安装ros的官方astra_launch astra_camera libuvc rgbd包, ubuntu melodic的需要下载源码安装这些包,因为apt-get不到
如果提示源码安装找不到包,到ros wiki上更新一下本地的ros软件源
$ sudo apt-get install ros-kinetic-astra-camera
$ sudo apt-get install ros-kinetic-astra-launch
$ sudo apt-get install ros-kinetic-libuvc-*
$ sudo apt-get install ros-kinetic-rgbd-launch
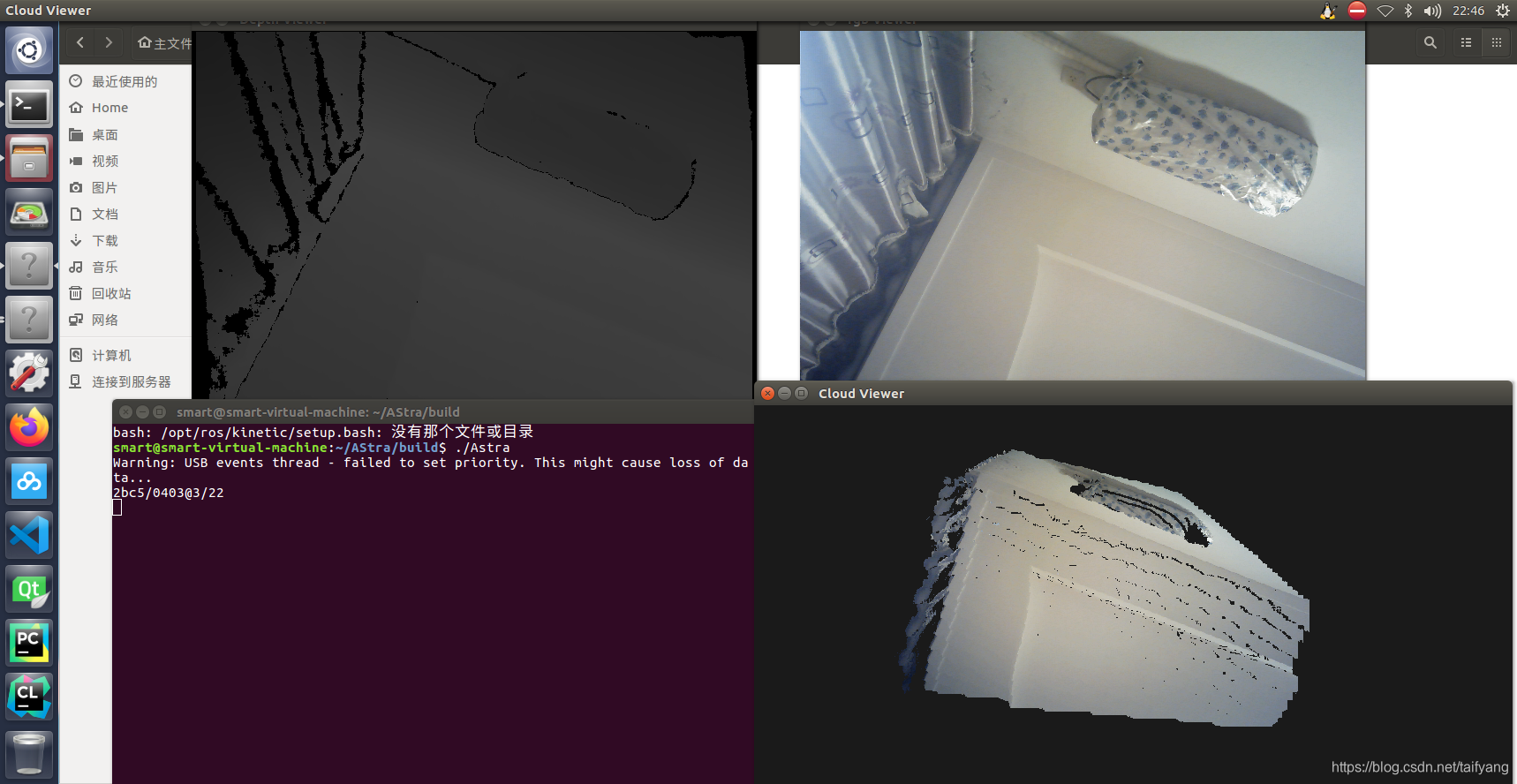
3.astra pro获取深度图像 无色彩pointCloud2
$ roslaunch astra_launch astra.launch 打开rqt_image_view查看图像话题
$ rqt_image_view
打开rviz查看无彩色点云数据
$ rviz
4.astra pro获取彩色图像 带彩色的pointCloud2
因为astra的驱动无发布彩色图像,导致点云数据也无彩色数据.
有三种思路取解决:
1.修改官方驱动
2.修改ros的底层astra_camera 和 rgbd_launch 的适配
3.另外新开一个节点监听无彩色pointCloud2数据和彩色数据,用彩色数据的rgb通道数值填充pointCloud2的rgbd的通道,在重新发布出来就是彩色的点云数据
这里采用第二种做法,第一做法难度大,第三做法耗电脑资源
4.1获取彩色图像
这里采用ros的uvc_camera包来获取彩色图像
$ sudo apt-get install uvc_camera
新建一个launch文件来启动uvc_camera
<launch><node pkg="uvc_camera" type="uvc_camera_node" name="uvc_camera" output="screen"><param name="device" type="string" value="/dev/video1" /> <param name="width" type="int" value="640" /><param name="height" type="int" value="480" /><param name="fps" type="int" value="30" /><param name="frame_id" type="string" value="camera_rgb_optical_frame" /></node>
</launch>/dev/video1时摄像头的设备号,查看一下摄像头的设备号
$ ls /dev
启动上面的launch文件
$ roslauch uvc.launch
使用rqt_image_view查看

当然也可以采用usb_cam来获取彩色图像,参数ros wiki上有
4.2 校准彩色摄像头和深度摄像头
获取彩色点云数据需要对相机进行校准(个人感觉比kinect校准难,校准了好多遍)
校准深度摄像头
$ roslaunch astra_launch astrapro.launch
$ rosrun camera_calibration cameracalibrator.py image:=/camera/ir/image camera:=/camera/ir --size 8x6 --square 0.024把校准得到的yaml文件的camera_name值设为 camera_name: depth_Astra_Orbbec
校准彩色摄像头
$ rosrun uvc_camera uvc_camera_node device:=/dev/video1
$ rosrun camera_calibration cameracalibrator.py image:=/image_raw camera:=/ --size 8x6 --square 0.024把校准得到的yaml文件的camera_name值设为 camera_name: rgb_Astra_Orbbec
创建launch文件
<launch><!-- "camera" should uniquely identify the device. All topics are pushed downinto the "camera" namespace, and it is prepended to tf frame ids. --><arg name="camera" default="camera" /><arg name="rgb_frame_id" default="$(arg camera)_rgb_optical_frame" /><arg name="depth_frame_id" default="$(arg camera)_depth_optical_frame" /><!-- device_id can have the following formats:"#n" : the nth device found, starts from 1"2@n" : the nth device on USB bus 2, n starts from 1"2bc5/0401@1/6" : uri in format <vendor ID>/<product ID>@<bus number>/<device number>"15120410023" : serial number --><arg name="device_id" default="#1" /><arg name="bootorder" default="0" /><arg name="devnums" default="1" /><!-- By default, calibrations are stored to file://${ROS_HOME}/camera_info/${NAME}.yaml,where ${NAME} is of the form "[rgb|depth]_[serial#]", e.g. "depth_B00367707227042B".See camera_info_manager docs for calibration URL details. --><!--<arg name="rgb_camera_info_url" default="" /><arg name="depth_camera_info_url" default="" />--><arg name="rgb_camera_info_url" default="file://$(find drive)/rgb.yaml" /><arg name="depth_camera_info_url" default="file://$(find drive)/ir.yaml" /><!-- Hardware depth registration --><arg name="depth_registration" default="false" /><!-- Driver parameters --><arg name="color_depth_synchronization" default="false" /><arg name="auto_exposure" default="true" /><arg name="auto_white_balance" default="true" /><!-- Arguments for remapping all device namespaces --><arg name="rgb" default="rgb" /><arg name="ir" default="ir" /><arg name="depth" default="depth" /><!-- Optionally suppress loading the driver nodelet and/or publishing the default tftree. Useful if you are playing back recorded raw data from a bag, or aresupplying a more accurate tf tree from calibration. --><arg name="load_driver" default="true" /><arg name="publish_tf" default="true" /><!-- Processing Modules --><arg name="rgb_processing" default="true" /><arg name="debayer_processing" default="false" /><arg name="ir_processing" default="false" /><arg name="depth_processing" default="true" /><arg name="depth_registered_processing" default="true" /><arg name="disparity_processing" default="false" /><arg name="disparity_registered_processing" default="false" /><arg name="hw_registered_processing" default="true" if="$(arg depth_registration)" /><arg name="sw_registered_processing" default="false" if="$(arg depth_registration)" /><arg name="hw_registered_processing" default="false" unless="$(arg depth_registration)" /><arg name="sw_registered_processing" default="true" unless="$(arg depth_registration)" /><!-- Disable bond topics by default --><arg name="respawn" default="false" /><!-- Worker threads for the nodelet manager --><arg name="num_worker_threads" default="4" /><!-- Push down all topics/nodelets into "camera" namespace --><group ns="$(arg camera)"><!-- Start nodelet manager --><arg name="manager" value="$(arg camera)_nodelet_manager" /><arg name="debug" default="false" /> <!-- Run manager in GDB? --><include file="$(find rgbd_launch)/launch/includes/manager.launch.xml"><arg name="name" value="$(arg manager)" /><arg name="debug" value="$(arg debug)" /><arg name="num_worker_threads" value="$(arg num_worker_threads)" /></include><!-- Load driver --><include file="$(find astra_launch)/launch/includes/device.launch.xml" if="$(arg load_driver)"><arg name="manager" value="$(arg manager)" /><arg name="device_id" value="$(arg device_id)" /><arg name="bootorder" value="$(arg bootorder)" /><arg name="devnums" value="$(arg devnums)" /><arg name="rgb_frame_id" value="$(arg rgb_frame_id)" /><arg name="depth_frame_id" value="$(arg depth_frame_id)" /><arg name="rgb_camera_info_url" value="$(arg rgb_camera_info_url)" /><arg name="depth_camera_info_url" value="$(arg depth_camera_info_url)" /><arg name="rgb" value="$(arg rgb)" /><arg name="ir" value="$(arg ir)" /><arg name="depth" value="$(arg depth)" /><arg name="respawn" value="$(arg respawn)" /><arg name="depth_registration" value="$(arg depth_registration)" /><arg name="color_depth_synchronization" value="$(arg color_depth_synchronization)" /><arg name="auto_exposure" value="$(arg auto_exposure)" /><arg name="auto_white_balance" value="$(arg auto_white_balance)" /></include><!-- Load standard constellation of processing nodelets --><include file="$(find rgbd_launch)/launch/includes/processing.launch.xml"><arg name="manager" value="$(arg manager)" /><arg name="rgb" value="$(arg rgb)" /><arg name="ir" value="$(arg ir)" /><arg name="depth" value="$(arg depth)" /><arg name="respawn" value="$(arg respawn)" /><arg name="rgb_processing" value="$(arg rgb_processing)" /><arg name="debayer_processing" value="$(arg debayer_processing)" /><arg name="ir_processing" value="$(arg ir_processing)" /><arg name="depth_processing" value="$(arg depth_processing)" /><arg name="depth_registered_processing" value="$(arg depth_registered_processing)" /><arg name="disparity_processing" value="$(arg disparity_processing)" /><arg name="disparity_registered_processing" value="$(arg disparity_registered_processing)" /><arg name="hw_registered_processing" value="$(arg hw_registered_processing)" /><arg name="sw_registered_processing" value="$(arg sw_registered_processing)" /></include><node pkg="uvc_camera" type="uvc_camera_node" name="uvc_camera" output="screen"><param name="device" value="/dev/video1" /> <param name="camera_info_url" value="$(arg rgb_camera_info_url)" /><param name="camera_name" value="rgb_Astra_Orbbec"/><param name="width" value="640" /><param name="height" value="480" /><param name="fps" value="30" /><param name="frame_id" value="camera_rgb_optical_frame" /><remap from="/camera/camera_info" to="/camera/rgb/camera_info"/><remap from="/camera/image_raw" to="/camera/rgb/image_raw"/></node></group> <!-- camera --><!-- Load reasonable defaults for the relative pose between cameras --><include file="$(find astra_launch)/launch/includes/astra_frames.launch" if="$(arg publish_tf)"><arg name="camera" value="$(arg camera)" /></include></launch>
自行修改ir 和 rgb两个文件的路径,启动这个launch文件打开rviz订阅/camera/depth_registered/points就可以看到彩色点云了

总结:后期可以利用这些数据进行opencv tensorFlow 开发,及move_base的导航