参考资料:
http://www.orbbec.com.cn/sys/list/11.html
https://blog.csdn.net/weixin_43489667/article/details/107244318
https://blog.csdn.net/qq_36711448/article/details/100120939
https://blog.csdn.net/qq_41951923/article/details/108175449
调试文件:
https://3dclub.orbbec3d.com/

摄像头有四个镜头,从左到右的镜头分别是1 ir发射源 2 最小距离传感器 3 彩色摄像头 4 ir接收器
1 安装相关依赖软件
查看ROS版本
echo ${ROS_DISTRO}
安装相应依赖
ubuntu18 melodic下载以下驱
OpenNI-Linux-x64-2.3.tar.bz2```bash
$sudo apt-get install build-essential freeglut3 freeglut3-dev
$ldconfig -p | grep libudev.so.1
$cd /lib/x86_64-linux-gnu
$sudo ln -s libudev.so.x.x.x libudev.so.1
sudo apt install ros- R O S D I S T R O − r g b d − l a u n c h r o s − ROS_DISTRO-rgbd-launch ros- ROSDISTRO−rgbd−launchros−ROS_DISTRO-libuvc ros- R O S D I S T R O − l i b u v c − c a m e r a r o s − ROS_DISTRO-libuvc-camera ros- ROSDISTRO−libuvc−cameraros−ROS_DISTRO-libuvc-ros
2 **下载功能包源码**
编译和安装驱动
```bashcd OpenNI-Linux-x64-2.3sudo chmod a+x install.shsudo ./install.sh
source OpenNIDevEnvironment
cd Samples/SimpleViewer
make
连接设备
$ cd Bin/x64-Release
$ ./SimpleViewer
编译安装libuvc
$ cd ~
$ git clone https://github.com/ktossell/libuvc
$ cd libuvc
$ mkdir build
$ cd build
$ cmake ..
$ make && sudo make install
$ sudo cp /usr/include/libusb-1.0/libusb.h /usr/local/include/libuvc/
cd ~/catkin_ws/src
git clone https://github.com/orbbec/ros_astra_camera
git clone https://github.com/LFZ1994/astrapro_launch
3 创建 udev 规则
roscd astra_camera
./scripts/create_udev_rules
4 编译功能包
cd ~/catkin_ws
catkin_make --pkg astra_camera astrapro_launch
5 启动摄像头
roslaunch astrapro_launch astrapro.launch
6 查看图像
rqt_image_view
以下是
相关原文链接:https://blog.csdn.net/qq_30263737/article/details/106245001
1.下载 https://orbbec3d.com/develop/ 这个官网的驱动
# 下载驱动文件:OpenNI_2.3.0.63(里面包含linux和windows的驱动)# 下载SDK文件(linux):AstraSDK-v2.1.1-24f74b8b15-Ubuntu-x86_64# 下载SDK文件(windows):当时没有下载# 下载用户手册:Doc_SDK_AstraSDK-v2.1.0-9bced77c41.chm
2.驱动安装方法
参考:/OpenNI_2.3.0.63/Linux/Readme
# There are two zip files, one is for 32bit machine, the other one is for 64bit# We choose 64bit(x64) and make the example as follows:# To run visual samples(e.g., SimpleViewer), you will need freeglut3 header and libaries, please install:$ sudo apt-get install build-essential freeglut3 freeglut3-dev#check udev version, Orbbec Driver need libudev.so.1, if can't find it, can make symbolic link from libudev.so.x.x,
#which usually locate in /lib/x86_64-linux-gnu or /lib/i386-linux-gnu
$ldconfig -p | grep libudev.so.1
$cd /lib/x86_64-linux-gnu
$sudo ln -s libudev.so.x.x.x libudev.so.1# copy tgz file to any place you want(e.g., Home)# unzip tgz file
$ tar zxvf OpenNI-Linux-x64-2.2-0118.tgz
$ cd OpenNI-Linux-x64-2.2# run install.sh to generate OpenNIDevEnvironment, which contains OpenNI development environment$ sudo sh ./install.sh# please replug in the device for usb-register# add environment variables
$ source OpenNIDevEnvironment# build sample(e.g., SimpleViewer)
$ cd Samples/SimpleViewer
$ make# run sample
# connect sensor
$ cd Bin/x64-Release
$ ./SimpleViewer 这会报错,深度和那个尺寸大小不一样# now you should be able to see a GUI window showing the depth stream video测试和查看
./SimpleViewer
./ClosestPointViewerldd SimpleViewer
3.SDK安装方法参考:
# 解压AstraSDK-v2.0.18-05cfa52534-20191108T074013Z-ubuntu1604.tar.gz,并修改文件夹名为AstraSDK-v2.0.18-Linux# 里面主要有
/AstraSDK-v2.0.18-Linux/samples/cmake/FindSFML.cmake
/AstraSDK-v2.0.18-Linux/samples/cmake/FindAstra.cmake
/AstraSDK-v2.0.18-Linux/samples/cmake/cpp-api 里面都是cpp文件
/AstraSDK-v2.0.18-Linux/samples/cmake/sfml 里面都是cpp文件# 如果运行不了程序,就按下面的方法,自己编译安装一下
# 安装方法参考:乐视深度相机使用记录(2).md
测试和查看
# 进入AstraSDK-v2.0.18-Linux文件夹:
./bin/SimpleStreamViewer-SFMLldd bin/SimpleStreamViewer-SFML
------------------------------------------
使用USB连接摄像头后,查看设备是否存在:
> ls /dev/video*
/dev/video0
[台式机没有内置摄像头,所以0号设备就是外接摄像头设备]
简单查看相机正常图像:
> cheese
[cheese 是Ubuntu内置的开启摄像头设备的工具,然后就可以看到来自相机的RGB图像]
lsusb
liuhao@liuhao-Lenovo:~$ lsusb
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 001 Device 003: ID 04ca:7070 Lite-On Technology Corp.
Bus 001 Device 002: ID 17ef:60ca Lenovo
Bus 001 Device 004: ID 0bda:b023 Realtek Semiconductor Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
liuhao@liuhao-Lenovo:~$ lsusb
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 001 Device 003: ID 04ca:7070 Lite-On Technology Corp.
Bus 001 Device 002: ID 17ef:60ca Lenovo
Bus 001 Device 013: ID 2bc5:0502 # 插上相机,多了这个
Bus 001 Device 012: ID 2bc5:0403 # 插上相机,多了这个
Bus 001 Device 011: ID 05e3:0610 Genesys Logic, Inc. 4-port hub # 插上相机,多了这个
Bus 001 Device 004: ID 0bda:b023 Realtek Semiconductor Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
liuhao@liuhao-Lenovo:~$ 查看558-orbbec-usb.rules
liuhao@liuhao-Lenovo:~$ cd /etc/udev/rules.d/liuhao@liuhao-Lenovo:/etc/udev/rules.d$ ls
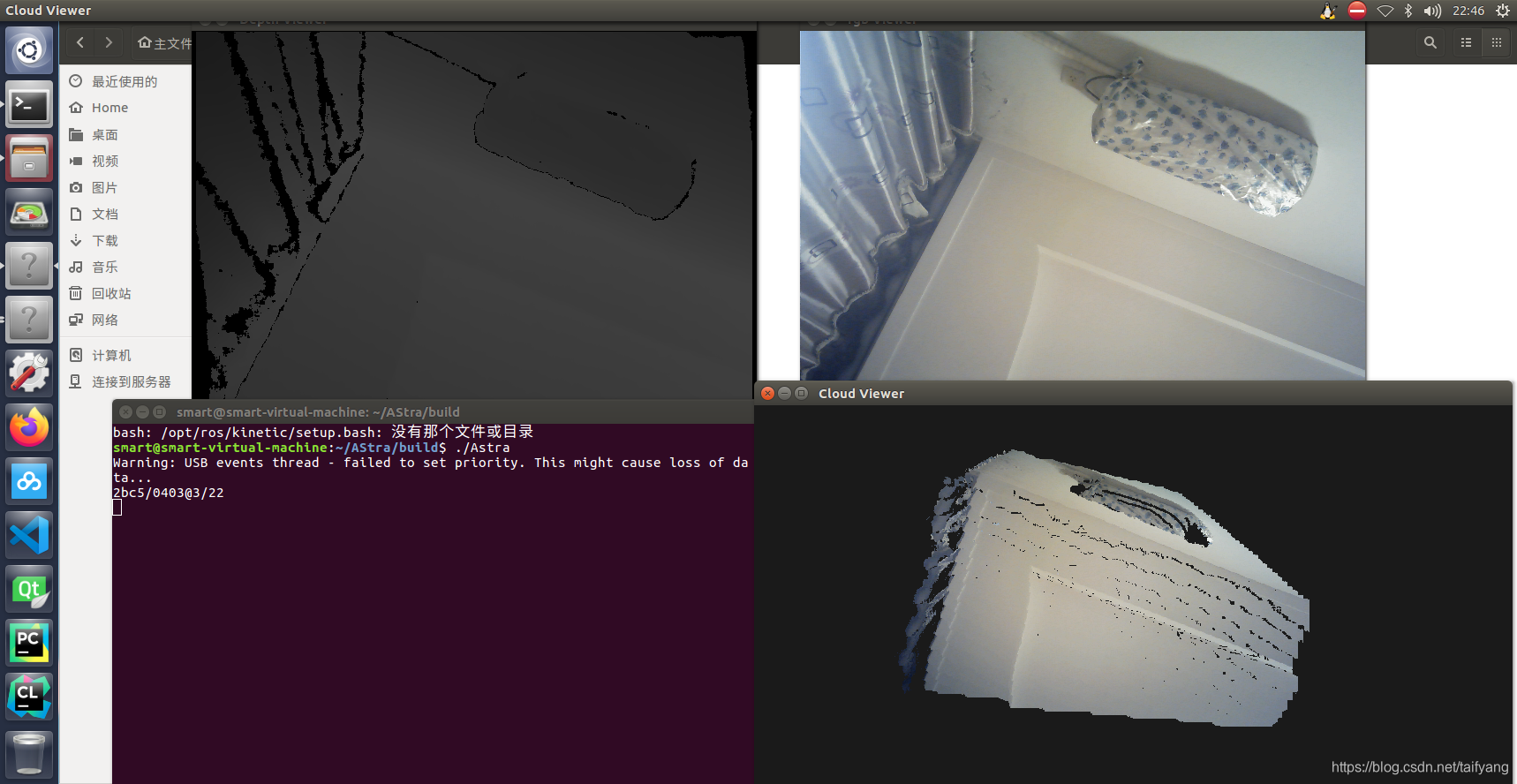
558-orbbec-usb.rules 90-kinect2.rules当前问题
图像输入与灰度云输入不能同时进行。暂时还没能找到原因。