四轴飞行器姿态控制
一、姿态解算相关概念
1.欧拉角
用来表示三维空间中运动物体绕坐标轴旋转的情况,即物体每时每秒的姿态可以由欧拉角表示。
2.四元数
四元数用于物体的旋转,是一种复杂但是效率较高的旋转方式。
对于一个物体的旋转,我们只需要知道四个值:一个旋转向量+一个旋转角度,而四元素也正是
这样设计的:q = (x, y, z, w).其中x,y,z代表向量的三维坐标,w代表角度。
二、欧拉角
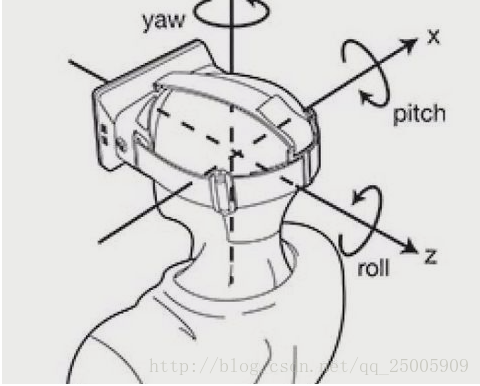
Z轴正方向为前进方向
pitch : 俯仰,将物体绕X轴旋转(localRotationX)
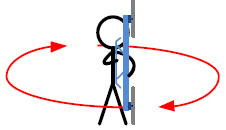
yaw : 航向,将物体绕Y轴旋转(localRotationY)
roll: 横滚,将物体Z轴旋转(localRotationZ)
头模型的姿态角,标注
三、运动状态
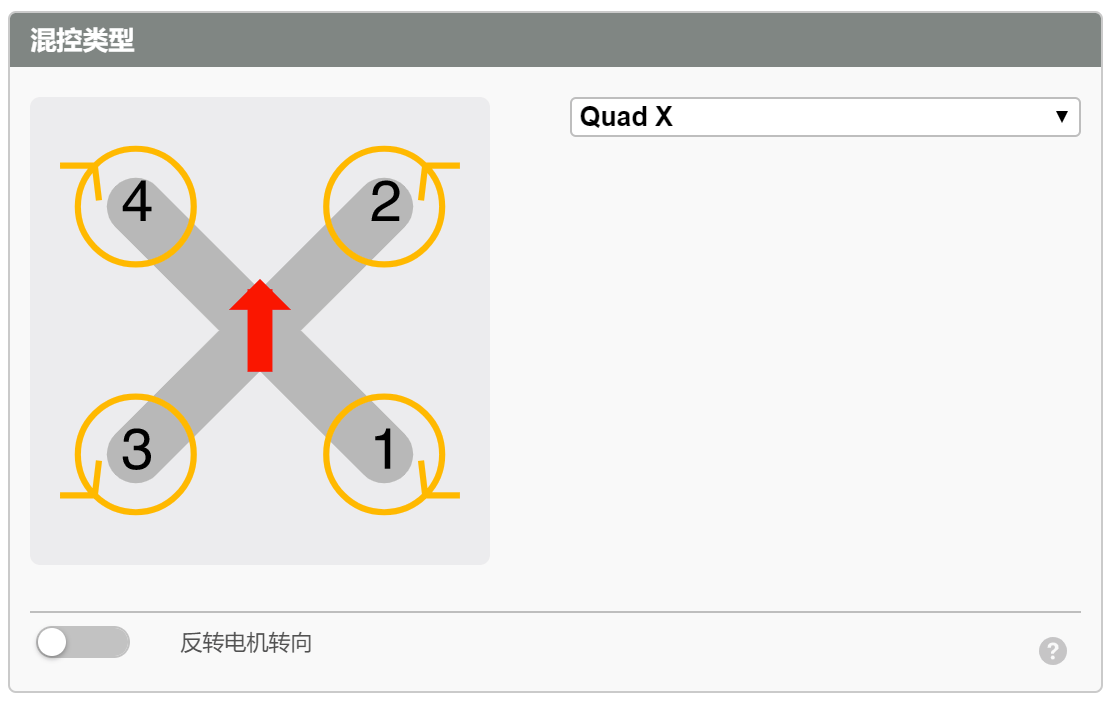
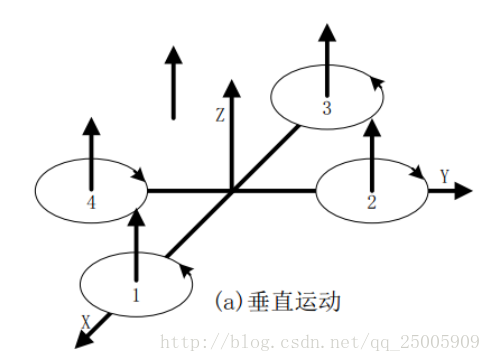
**四旋翼飞行器 结构形式为,电机1和电机3逆时针旋转的同时,电机2 和电机4顺时针旋转,这样陀螺效应和空气动力扭矩效应均被抵消。
在图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。**
1. 垂直运动
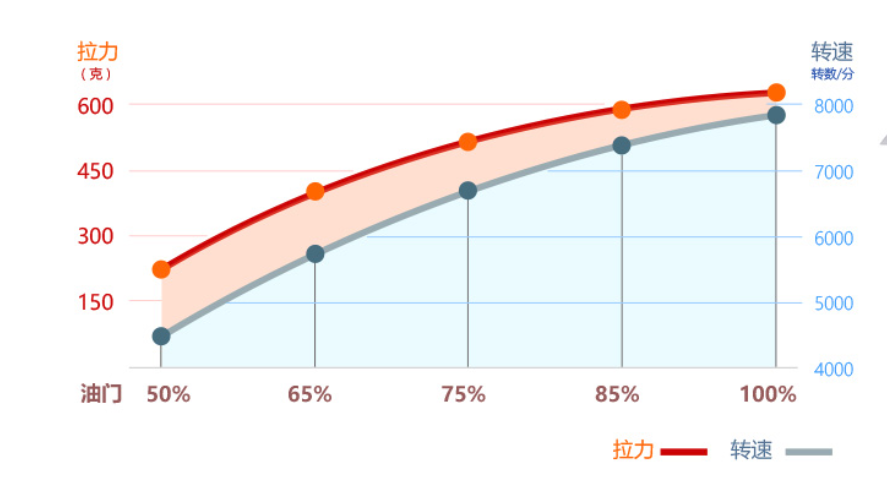
垂直运动相对来说比较容易。在图a所示,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
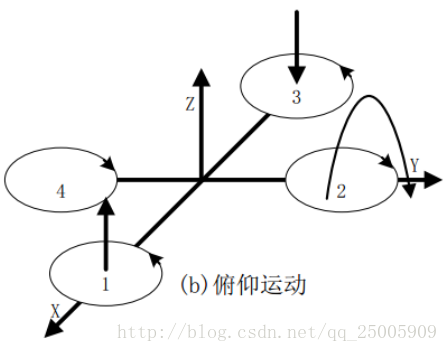
2.俯仰运动
如图b所示,保持1,3电机转速不变,改变2,4电机转速可以实现俯仰运动。
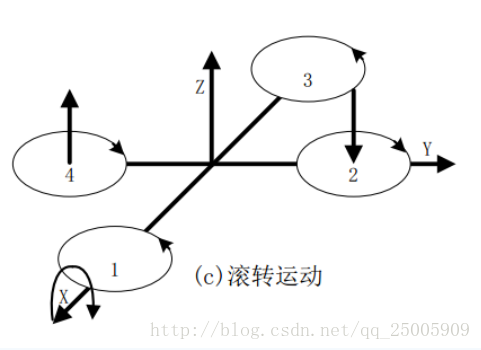
3.滚转运动
滚转运动:与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
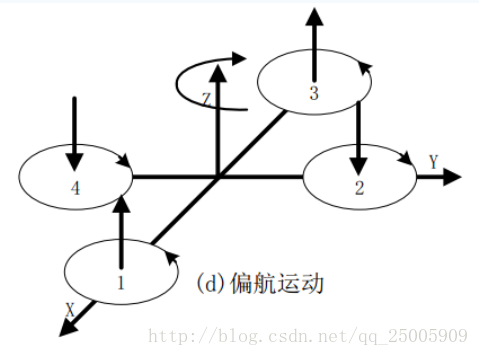
4.偏航运动
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的来年各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图d中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
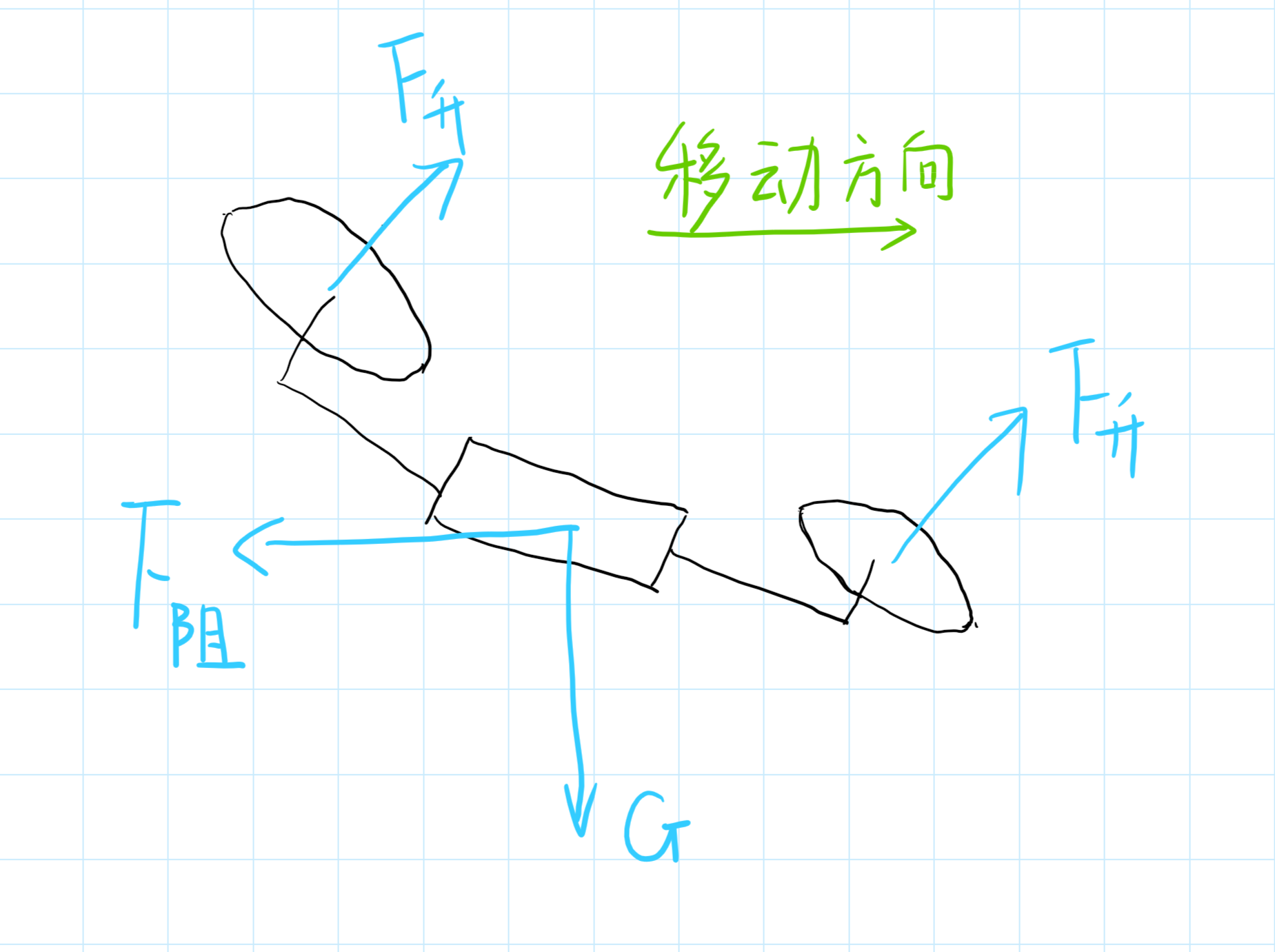
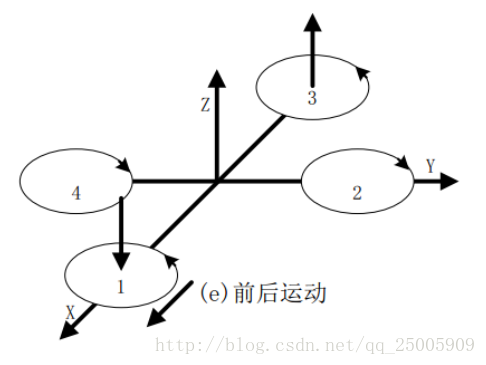
5.前后运动
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图e中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。当然在图b图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
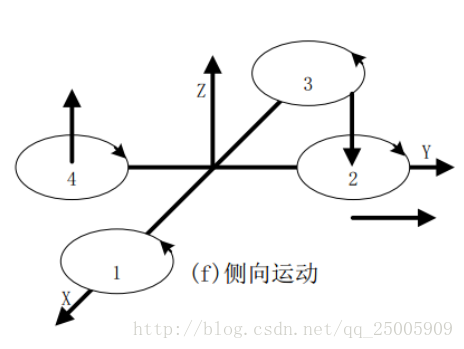
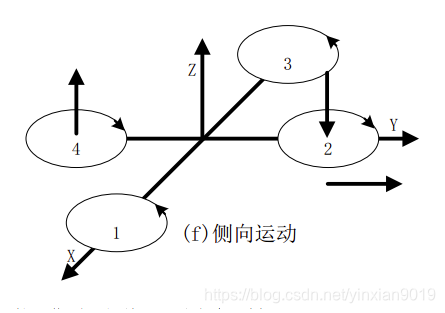
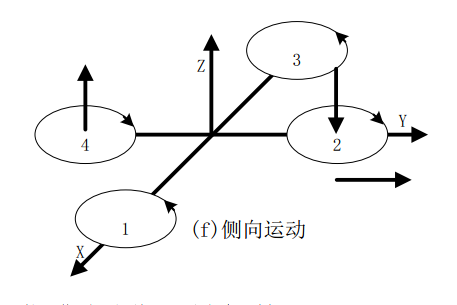
6.侧向运动
在图f中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。 总得来说就是控制四个电机的速度了。然后相应的提高速度和减慢速度就可以让四轴动起来了。