1、用winSCP连接弹性服务器,将windows下的gaussDB安装包复制到linux下

2、将GaussDB安装包从root目录下复制一份到/gs目录下
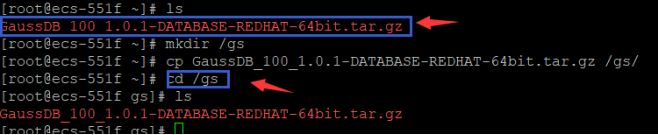
3、在当前目录解压缩
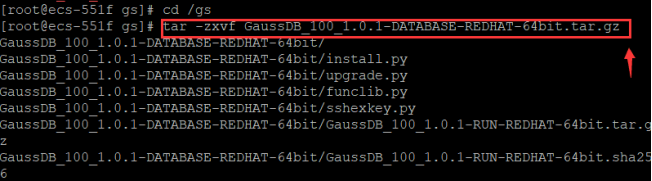
4、打开配置文件
vi /etc/profile
添加如下命令
ulimit -c unlimited

5、打开系统配置文件
vi /etc/sysctl.conf
添加如下命令
kernel.core_pattern=/corefile/core-%e-%p-%t

6、运行如下命令,使得更改后的配置生效
使用ulimit -c验证

7、创建用户omm,并分配到用户组dbgrp
[root@ecs-551f gs]# useradd -g dbgrp -d /home/omm -m -s /bin/bash omm

8、切换目录
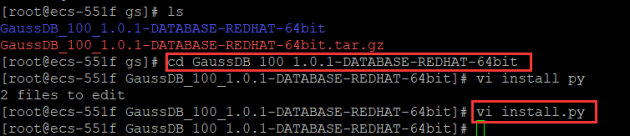
vi install.py
OS版本检测,为了版本兼容性修改-1为-2

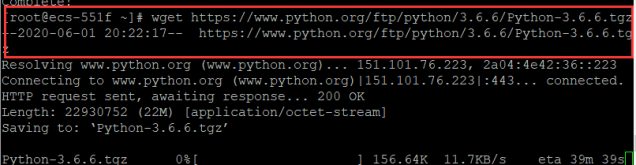
9、安装python环境,wget之前最好准备编译环境,否则可能出错
yum groupinstall ‘Development Tools’
yum install zlib-devel bzip2-devel openssl-devel ncurses-devel
(python安装过程此处省略)
1)下载wget https://www.python.org/ftp/python/3.6.6/Python-3.6.6.tgz
2)解压tar -zxvf Python-3.6.6.tgz
3)进入源码包文件夹cd Python-3.6.6
4)指定安装目录为/opt/python36./configure --prefix=/opt/python36
5)make && make install
6)打开/etc/profile
更改linux的path变量,添加python3
10、在第一次安装时,遇到如下问题,输出日志显示,数据库实例启动失败:


11、安装过程中可以再次连接一个PUTTY,测试发现正在创建文件

12、安装完成后,切换用户到OMM,本虚拟机.bashrc配置如下:

13、安装gaussDB
python3 install.py -U omm:dbgrp -R /gs/app -D /gs/gaussdb100 -C LSNR_ADDR=127.0.0.1,192.168.0.107 -C LSNR_PORT=1888

删除文件,并注释如图所示

14、安装成功

15、查看数据库

16、建立链接
su -gsdb
至此,guassDB安装完毕!