文章目录
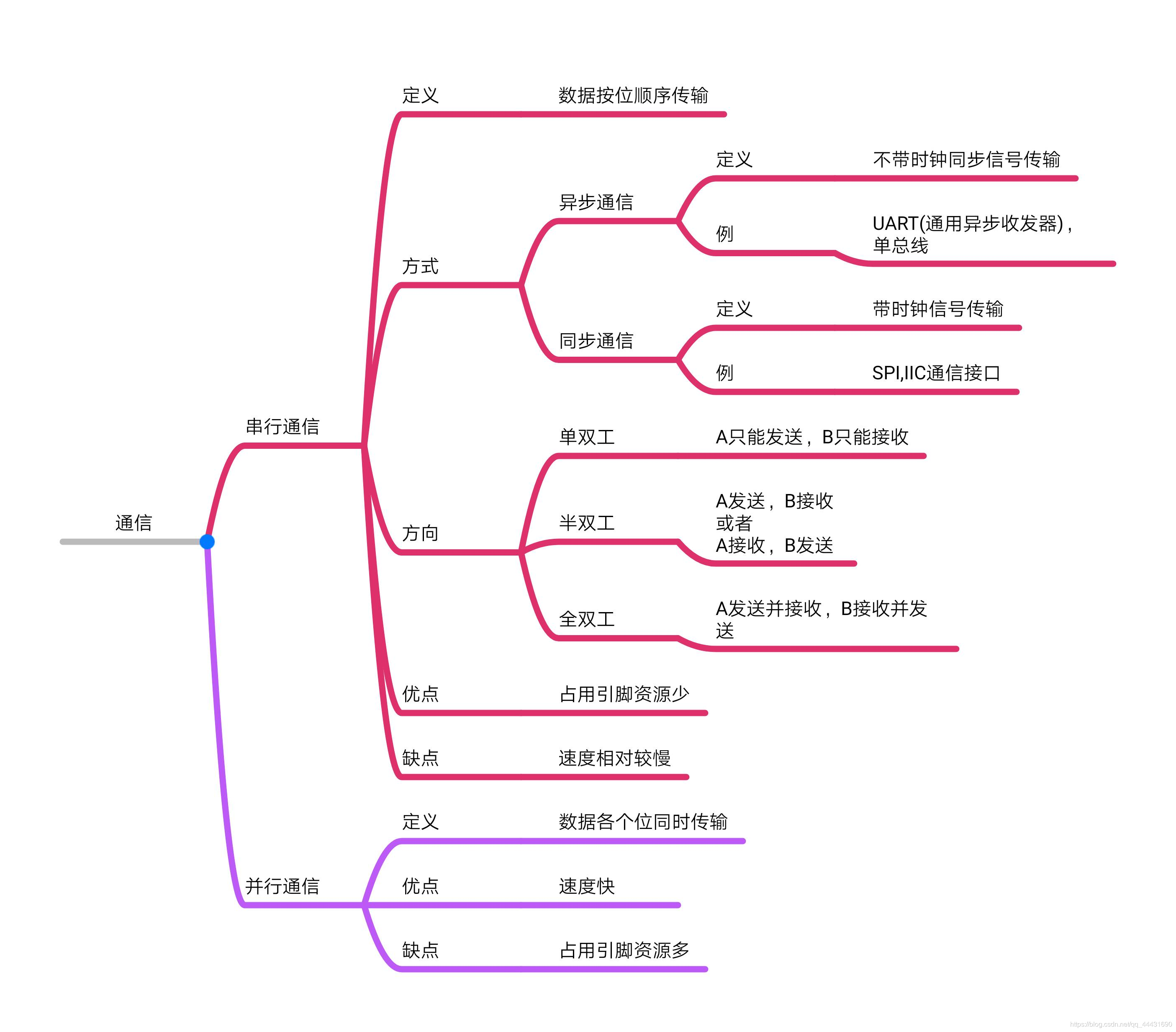
- 【 1. 概述 】
- 【 2. 原理 】
- 1. 全双工特征下的传输特点
- 2. 二线式、三线式的SPI
- 3. SPI 模式
- CPOL(Clock Polarity),时钟极性
- CPHA (Clock Phase),时钟相位
- 通信模式_时序
- 4. 通信过程
- 5. 底层数据传输演示
- 【 3. SPI底层驱动 】
【 1. 概述 】
- SPI ( Serial Peripheral interface),串行外围设备接口。由摩托罗拉公司设计并实现。
- 特点
SPI 是一种 高速、全双工、同步、串行 的通信总线,采用主机(Master)-从机(Slave)的通信方式。 - SPI 接口
-
- MISO (Master Input Slave Output):主设备数据输入,从设备数据输出。
-
- MOSI (Master Output Slave Input):主设备数据输出,从设备数据输入。
-
- SCLK (Serial Clock),也叫做SCK:串行时钟信号。SPI规定只能由主设备产生,并根据此时钟信号一位一位地传输。
-
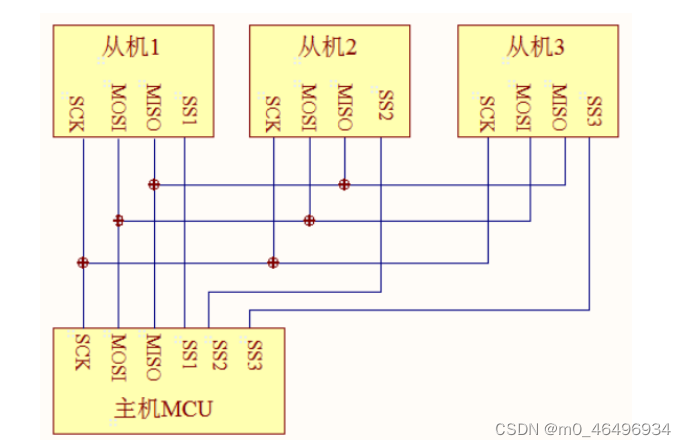
- SS (Slave Select),也叫做NSS、CS、SSEL:从设备片选信号,由主设备控制,为一个主设备连接多个从设备提供了可能。
【 2. 原理 】
1. 全双工特征下的传输特点
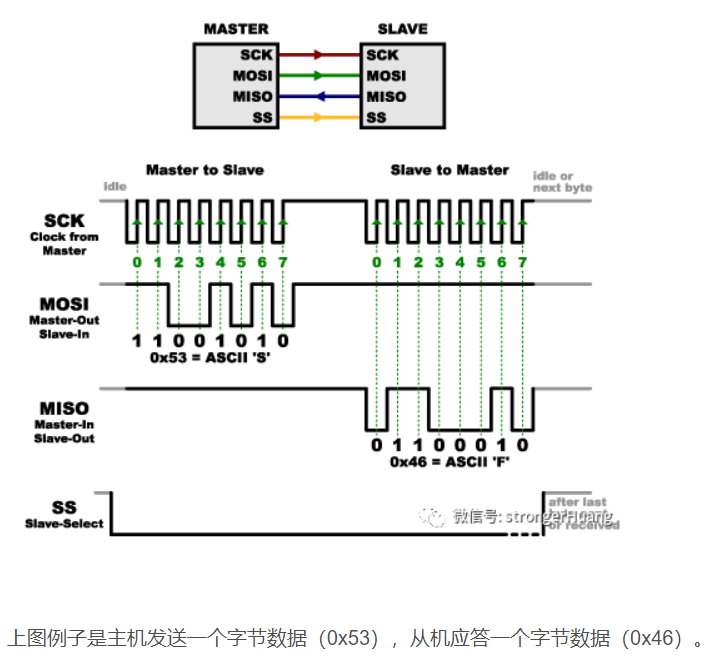
- 没有只进行读操作或者只进行写操作的说法,因为是全双工的传输方式:写操作和读操作是同步完成的。每次SPI传输数据时,主从设备都是在互相交换信息,即主/从机发一个数据必然会收到一个数据。

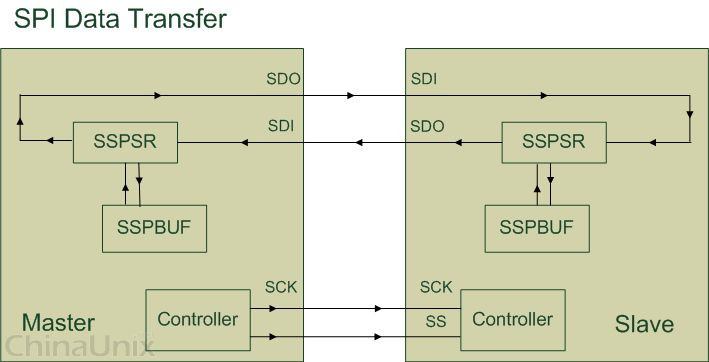
- 数据交换与移位寄存器
SPI总线的主机和从机都有一个移位寄存器。当主机向自己的移位寄存器写入数据时,数据会通过MOSI信号线进入到从机的移位寄存器;类似地,从机移位寄存器里的数据,通过MISO信号线进入到主机的移位寄存器。这样,主机和从机就完成了一次数据交换。下面这张图,是SPI通信的简明原理图:

- 如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的发送。
2. 二线式、三线式的SPI
- 如果主机只给从机发送命令,从机不需要回复数据的时候,那MISO就可以不要。
- 而在主机只读取从机的数据,不需要给从机发送指令的时候,那MOSI可以不要。
- 当一个主机一个从机的时候,从机的片选有时可以固定为有效电平而一直处于使能状态,那么CS可以不要;此时如果再加上主机只给从机发送数据,那么CS和MISO都可以不要;如果主机只读取从机送来的数据,CS和MOSI都可以不要。
3. SPI 模式
SPI共有4种通信模式,主机和从机需要工作在相同的模式下才能正常通信。
这4种模式是基于CPOL和CPHA进行划分:


CPOL(Clock Polarity),时钟极性
用于决定空闲时刻的电平状态。
- 通信的整个过程分为空闲状态和通信状态,SCLK在数据发送之前和数据发送之后的状态为 空闲状态 。
- 如果CPOL=0,那么空闲状态SCLK是低电平。
- 如果CPOL=1,那么空闲状态SCLK是高电平。
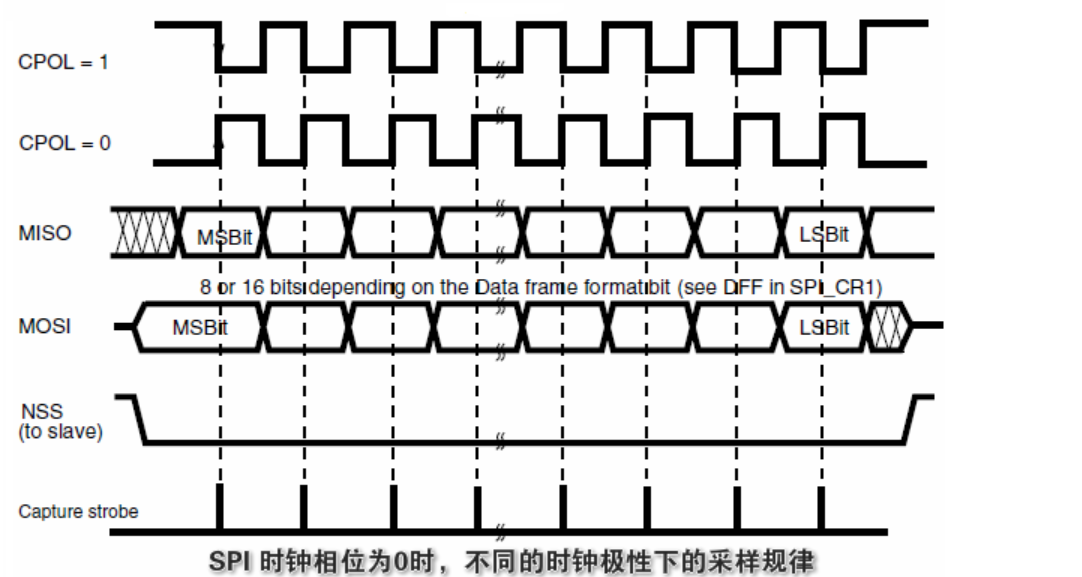
CPHA (Clock Phase),时钟相位
用于决定何时进行信号采样。
- 主机和从机要交换数据,就牵涉到一个问题,即主机在什么时刻输出数据到MOSI上而从机在什么时刻采样这个数据,或者从机在什么时刻输出数据到MISO上而主机什么时刻采样这个数据。同步通信的特点就是所有数据的变化和采样都是伴随着时钟沿进行的,也就是说数据总是在时钟的边沿附近变化或被采样。那么,如果一方在上升沿输出数据到MOSI上,另一方就只能在下降沿去采样这个数据;反之如果一方在下降沿输出数据,那么另一方就必须在上升沿采样这个数据。
- CPHA=1,就表示数据的输出是在一个时钟周期的第一个沿上,至于这个沿是上升沿还是下降沿,这要是CPOL的值而定,CPOL=1那就是下降沿,CPOL=0就是上升沿。那么数据的采样自然就是在第二个沿上了。
- CPHA=0,就表示数据的采样是在一个时钟周期的第一个沿上,如果CPHA=1就取下降沿,CPHA=0就取上升沿。那么数据的输出自然就在第二个沿上了。
仔细想一下,当CPHA=0时,这里会有一个问题:就是当一帧数据开始传输第一bit时,在第一个时钟沿上就采样该数据了,那么它是在什么时候输出来的呢?有两种情况:一是SSEL使能的边沿,二是上一帧数据的最后一个时钟沿,有时两种情况还会同时生效。
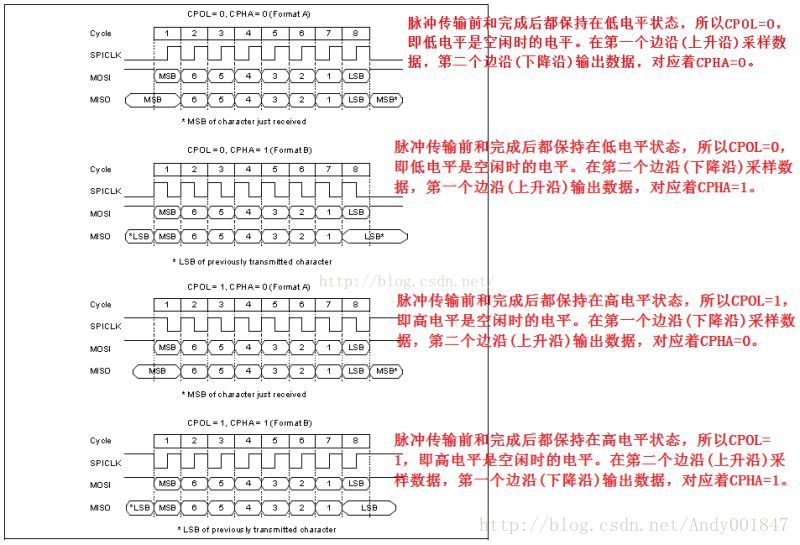
通信模式_时序
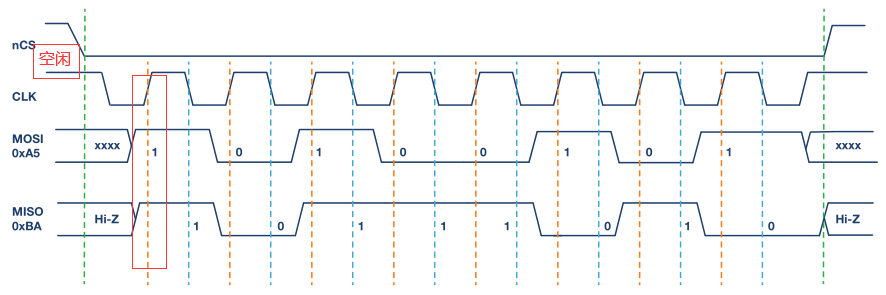
我们对CPOL=1,CPHA=1即 SPI 模式3进行讲解:

- 当数据发送前以及发送后,SCK都是高电平,因此也可以直接通过时序图推出CPOL=1。
- 可以看出,在SCK第一个沿的时候,MOSI和MISO的数据会发生变化,而在SCK第二个沿的时候,MOSI和MISO的数据是稳定的。又因为 SPI 只能在数据稳定时进行采样,数据不稳定时输出,所以图中是在第一个边沿输出第二个边沿采样,即CPHA=1。
- 注意最后最隐蔽的SSEL片选,一般情况下,这个引脚通常用来决定是哪个从机和主机进行通信。
4 种 SPI 通信模式的部分时序


4. 通信过程
- 主机先将NSS信号拉低,这样保证开始接收数据。
- 当从机接收端检测到时钟的边沿信号时,它将立即读取数据线上的信号,这样就得到了一位数据(1bit);
-
由于时钟是随数据一起发送的,因此指定数据的传输速度并不重要,尽管设备将具有可以运行的最高速度。
- 主机发送到从机时:主机产生相应的时钟信号,然后数据一位一位地将从MOSI信号线上进行发送到从机;
- 主机接收从机数据:如果从机需要将数据发送回主机,则主机将继续生成预定数量的时钟信号,并且从机会将数据通过MISO信号线发送;

5. 底层数据传输演示
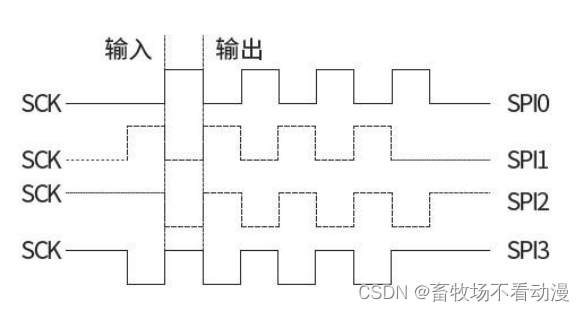
- SPI是一个环形总线结构,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
- 假设下面主机的8位寄存器装的是待发送的数据10101010,上升沿发送、下降沿接收、高位先发送。那么第一个上升沿来的时候 MOSI 数据将=1,主机寄存器=0101010x。下降沿到来的时候,MISO上的电平将锁存到从机寄存器中去,那么这时从机寄存器=0101010+MISO,这样在 8个时钟脉冲以后,两个寄存器的内容互相交换一次。这样就完成里一个 SPI 时序。

【 3. SPI底层驱动 】
/以下是SPI模块的初始化代码,配置成主机模式
//SPI口初始化
//这里是对SPI1的初始化
void SPI1_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure;SPI_InitTypeDef SPI_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOB时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟//GPIOFB3,4,5初始化设置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//PB3~5复用功能输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHzGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_SPI1); //PB3复用为 SPI1GPIO_PinAFConfig(GPIOB,GPIO_PinSource4,GPIO_AF_SPI1); //PB4复用为 SPI1GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_SPI1); //PB5复用为 SPI1//这里只针对SPI口初始化RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPISPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器SPI_Cmd(SPI1, ENABLE); //使能SPI外设SPI1_ReadWriteByte(0xff);//启动传输
}
//SPI1速度设置函数
//SPI速度=fAPB2/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
//fAPB2时钟一般为84Mhz:
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性SPI1->CR1&=0XFFC7;//位3-5清零,用来设置波特率SPI1->CR1|=SPI_BaudRatePrescaler; //设置SPI1速度 SPI_Cmd(SPI1,ENABLE); //使能SPI1
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{ while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空 SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个byte 数据while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据 }