Linux文件权限
Linux下一切皆文件
Linux中所有内容都是以文件的形式保存和管理,即:一切皆文件。
普通文件是文件。
目录(在win下称为文件夹)是文件。
硬件设备(键盘、硬盘、打印机)是文件。
Linux下有两种用户:超级用户(root)、普通用户。
超级用户:可以再linux系统下做任何事情,不受限制
普通用户:在linux下做有限的事情
超级用户的命令提示符是“#”,普通用户的命令提示符是“$”
命令:su [用户名]
功能:切换用户。
例如,要从root用户切换到普通用户user,则使用 su user。 要从普通用户user切换到root用户则使用 su root(root可以省略),此时系统会提示输入root用户的口令
文件访问者的分类
文件和文件目录的所有者:u—User
文件和文件目录的所有者所在的组的用户:g—Group
其它用户:o—Others
文件类型和访问权限
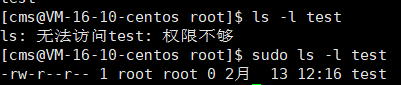
使用ls -l 指令查看test文件的信息
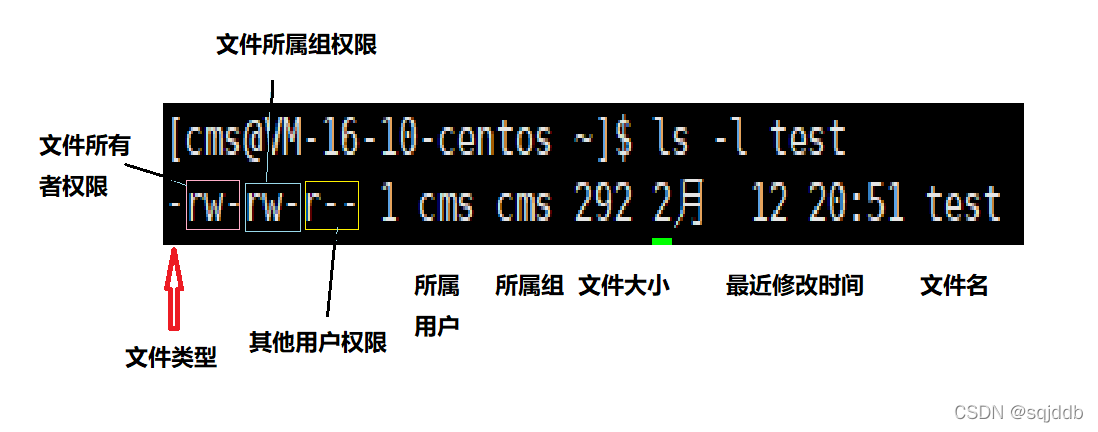
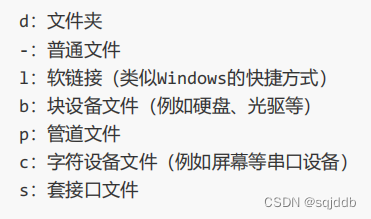
文件类型:
权限:
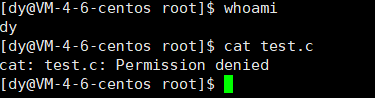
i.读(r):Read对文件而言,具有读取文件内容的权限;对目录来说,具有浏览该目录信息的权限
ii.写(w):Write对文件而言,具有修改文件内容的权限;对目录来说具有删除移动目录内文件的权限
iii.执行(x):execute对文件而言,具有执行文件的权限;对目录来说,具有进入目录的权限
iv.“—”表示不具有该项权限
文件权限值的表示方法
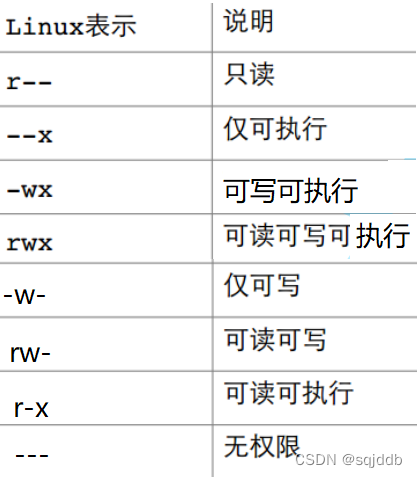
★★可以用二进制和八进制表示文件权限,拥有该权限该为为1,比如rwx权限用二进制表示是111,八进制表示为7
文件访问权限的相关设置方法
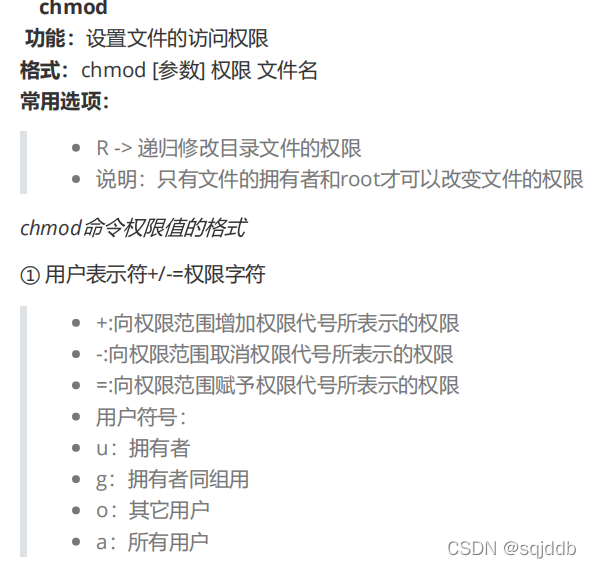



chown指令
功能:修改文件的拥有者
格式:chown [参数] 用户名 文件名

chgrp指令
功能:修改文件或目录的所属组
格式:chgrp [参数] 用户组名 文件名
常用选项:-R 递归修改文件或目录的所属组
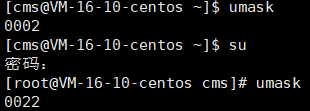
umask指令
功能:
查看或修改文件掩码

新建文件夹默认权限 666
新建目录默认权限 777
但实际上你所创建的文件和目录,看到的权限往往不是上面这个值。原因就是创建文件或目录的时候还要受到,umask的影响
umask的作用
超级用户默认掩码值为0022,普通用户默认为0002
此时你建立的文件默认权限是644(6-0,6-2,6-2),建立的目录的默认权限是755(7-0,7-2,7-2)
umask的用途
它是为了控制默认权限,不要使默认的文件和目录具有全权而设的
修改umask值
例如:umask 024则以后建立的文件和目录的默认权限就为642,753了
file指令
功能:辨识文件类型
语法:file [选项] 文件或目录
常用选项:
-c 详细显示指令执行过程,便于排错或分析程序执行的情形。
-z 尝试去解读压缩文件的内容
sudo指令
功能:sudo用于普通用户可以使用root权限来执行命令
但是如果不事先配置会出现这种情况
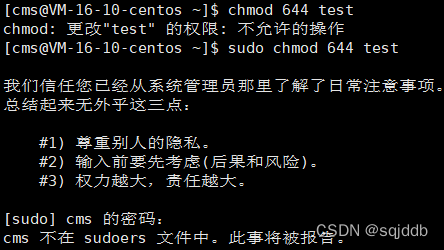
解决方案🔗
将用户cms添加到sudoers文件后,cms可以使用sudo执行root权限
目录的权限
可执行权限: 如果目录没有可执行权限, 则无法cd到目录中.
可读权限: 如果目录没有可读权限, 则无法用ls等命令查看目录中的文件内容.
可写权限: 如果目录没有可写权限, 则无法在目录中创建文件, 也无法在目录中删除文件
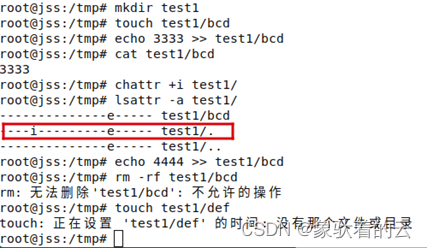
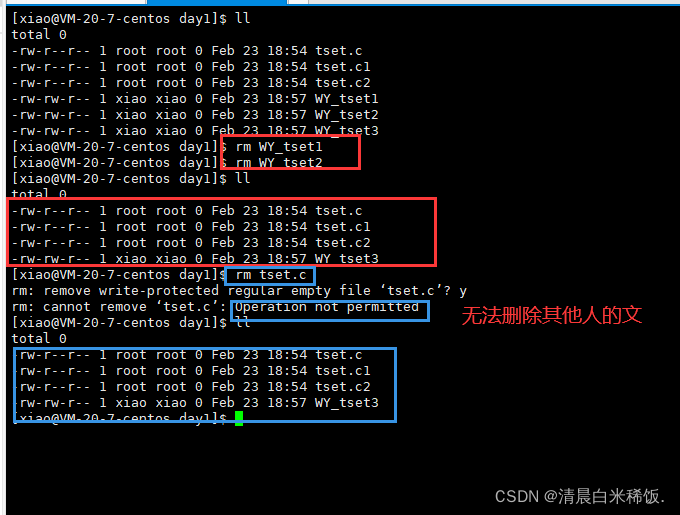
只要用户具有目录的写权限, 用户就可以删除目录中的文件, 而不论这个用户是否有这个文件的写权限,为解决这个问题,粘滞位应运而生。
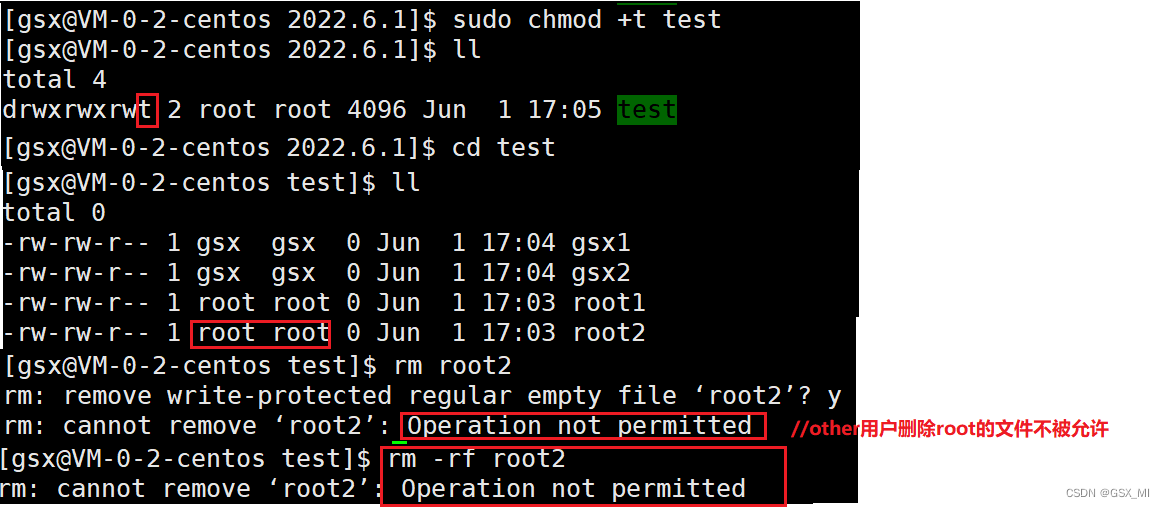
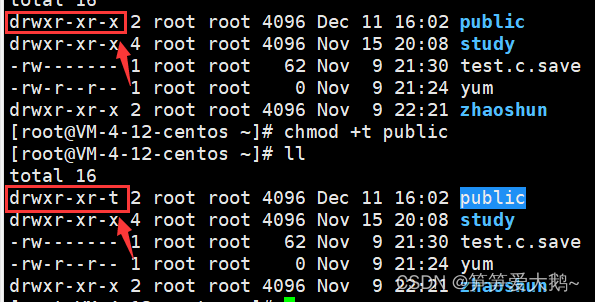
当一个目录被设置为"粘滞位"(用chmod +t),则该目录下的文件只能由
一、超级管理员删除
二、该目录的所有者删除
三、该文件的所有者删除
粘滞位设置示例🔗
一些误区:
目录的可执行权限是表示你可否在目录下执行命令。
如果目录没有-x权限,则无法对目录执行任何命令,甚至无法cd 进入目, 即使目录仍然有-r 读权限(这个地方很容易犯错,认为有读权限就可以进入目录读取目录下的文件)而如果目录具有-x权限,但没有-r权限,则用户可以执行命令,可以cd进入目录。但由于没有目录的读所以在目录下,即使可以执行ls命令,但仍然没有权限读出目录下的文档