到底什么是“IO Block”
很多人说BIO不好,会“block”,但到底什么是IO的Block呢?考虑下面两种情况:
- 用系统调用
read从socket里读取一段数据 - 用系统调用
read从一个磁盘文件读取一段数据到内存
如果你的直觉告诉你,这两种都算“Block”,那么很遗憾,你的理解与Linux不同。Linux认为:
-
对于第一种情况,算作block,因为Linux无法知道网络上对方是否会发数据。如果没数据发过来,对于调用
read的程序来说,就只能“等”。 -
对于第二种情况,不算做block。
是的,对于磁盘文件IO,Linux总是不视作Block。
你可能会说,这不科学啊,磁盘读写偶尔也会因为硬件而卡壳啊,怎么能不算Block呢?但实际就是不算。
一个解释是,所谓“Block”是指操作系统可以预见这个Block会发生才会主动Block。例如当读取TCP连接的数据时,如果发现Socket buffer里没有数据就可以确定定对方还没有发过来,于是Block;而对于普通磁盘文件的读写,也许磁盘运作期间会抖动,会短暂暂停,但是操作系统无法预见这种情况,只能视作不会Block,照样执行。
基于这个基本的设定,在讨论IO时,一定要严格区分网络IO和磁盘文件IO。NIO和后文讲到的IO多路复用只对网络IO有意义。
严格的说,O_NONBLOCK和IO多路复用,对标准输入输出描述符、管道和FIFO也都是有效的。但本文侧重于讨论高性能网络服务器下各种IO的含义和关系,所以本文做了简化,只提及网络IO和磁盘文件IO两种情况。
本文先着重讲一下网络IO。
BIO
有了Block的定义,就可以讨论BIO和NIO了。BIO是Blocking IO的意思。在类似于网络中进行read, write, connect一类的系统调用时会被卡住。
举个例子,当用read去读取网络的数据时,是无法预知对方是否已经发送数据的。因此在收到数据之前,能做的只有等待,直到对方把数据发过来,或者等到网络超时。
对于单线程的网络服务,这样做就会有卡死的问题。因为当等待时,整个线程会被挂起,无法执行,也无法做其他的工作。
顺便说一句,这种Block是不会影响同时运行的其他程序(进程)的,因为现代操作系统都是多任务的,任务之间的切换是抢占式的。这里Block只是指Block当前的进程。
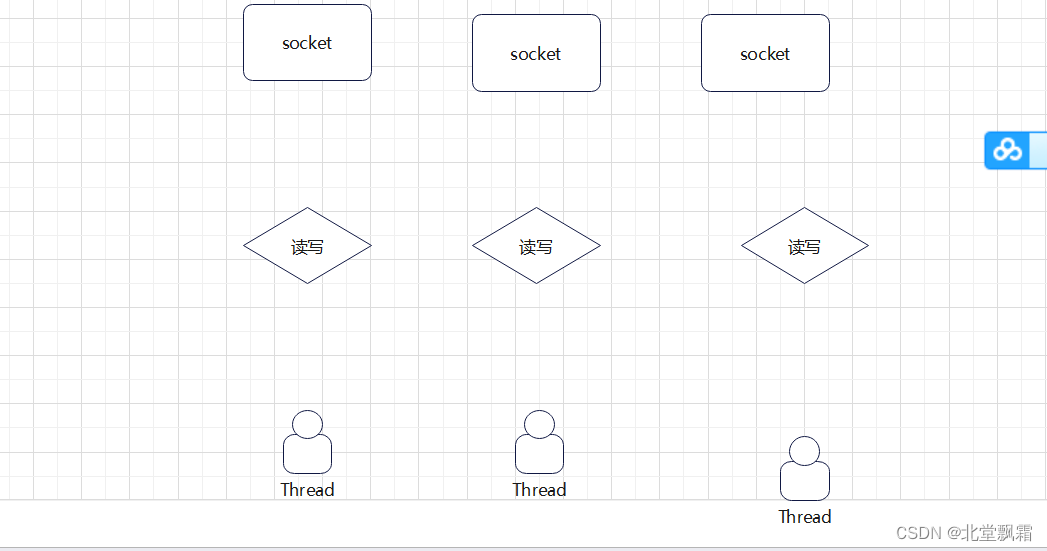
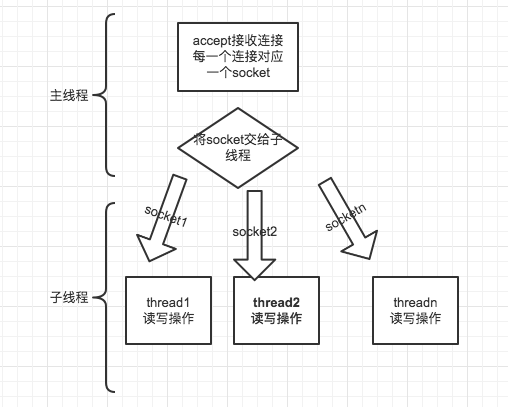
于是,网络服务为了同时响应多个并发的网络请求,必须实现为多线程的。每个线程处理一个网络请求。线程数随着并发连接数线性增长。这的确能奏效。实际上2000年之前很多网络服务器就是这么实现的。但这带来两个问题:
- 线程越多,Context Switch就越多,而Context Switch是一个比较重的操作,会无谓浪费大量的CPU。
- 每个线程会占用一定的内存作为线程的栈。比如有1000个线程同时运行,每个占用1MB内存,就占用了1个G的内存。
也许现在看来1GB内存不算什么,现在服务器上百G内存的配置现在司空见惯了。但是倒退20年,1G内存是很金贵的。并且,尽管现在通过使用大内存,可以轻易实现并发1万甚至10万的连接。但是水涨船高,如果是要单机撑1千万的连接呢?
问题的关键在于,当调用read接受网络请求时,有数据到了就用,没数据到时,实际上是可以干别的。使用大量线程,仅仅是因为Block发生,没有其他办法。
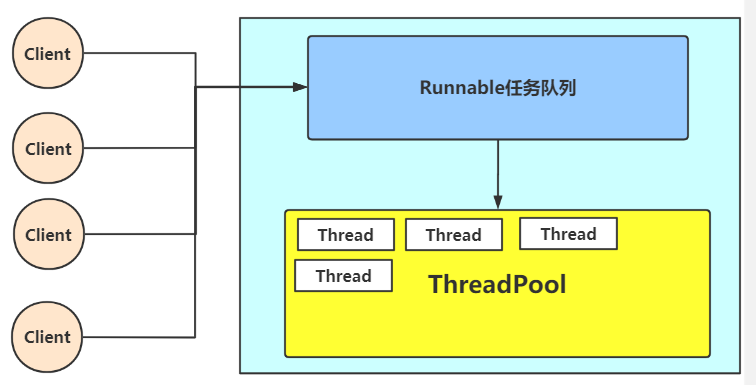
当然你可能会说,是不是可以弄个线程池呢?这样既能并发的处理请求,又不会产生大量线程。但这样会限制最大并发的连接数。比如你弄4个线程,那么最大4个线程都Block了就没法响应更多请求了。
要是操作IO接口时,操作系统能够总是直接告诉有没有数据,而不是Block去等就好了。于是,NIO登场。
NIO
NIO是指将IO模式设为“Non-Blocking”模式。在Linux下,一般是这样:
void setnonblocking(int fd) {int flags = fcntl(fd, F_GETFL, 0);fcntl(fd, F_SETFL, flags | O_NONBLOCK);
}
再强调一下,以上操作只对socket对应的文件描述符有意义;对磁盘文件的文件描述符做此设置总会成功,但是会直接被忽略。
这时,BIO和NIO的区别是什么呢?
在BIO模式下,调用read,如果发现没数据已经到达,就会Block住。
在NIO模式下,调用read,如果发现没数据已经到达,就会立刻返回-1, 并且errno被设为EAGAIN。
在有些文档中写的是会返回
EWOULDBLOCK。实际上,在Linux下EAGAIN和EWOULDBLOCK是一样的,即#define EWOULDBLOCK EAGAIN
于是,一段NIO的代码,大概就可以写成这个样子。
struct timespec sleep_interval{.tv_sec = 0, .tv_nsec = 1000};
ssize_t nbytes;
while (1) {/* 尝试读取 */if ((nbytes = read(fd, buf, sizeof(buf))) < 0) {if (errno == EAGAIN) { // 没数据到perror("nothing can be read");} else {perror("fatal error");exit(EXIT_FAILURE);}} else { // 有数据process_data(buf, nbytes);}// 处理其他事情,做完了就等一会,再尝试nanosleep(sleep_interval, NULL);
}
这段代码很容易理解,就是轮询,不断的尝试有没有数据到达,有了就处理,没有(得到EWOULDBLOCK或者EAGAIN)就等一小会再试。这比之前BIO好多了,起码程序不会被卡死了。
但这样会带来两个新问题:
- 如果有大量文件描述符都要等,那么就得一个一个的read。这会带来大量的Context Switch(
read是系统调用,每调用一次就得在用户态和核心态切换一次) - 休息一会的时间不好把握。这里是要猜多久之后数据才能到。等待时间设的太长,程序响应延迟就过大;设的太短,就会造成过于频繁的重试,干耗CPU而已。
要是操作系统能一口气告诉程序,哪些数据到了就好了。
于是IO多路复用被搞出来解决这个问题。
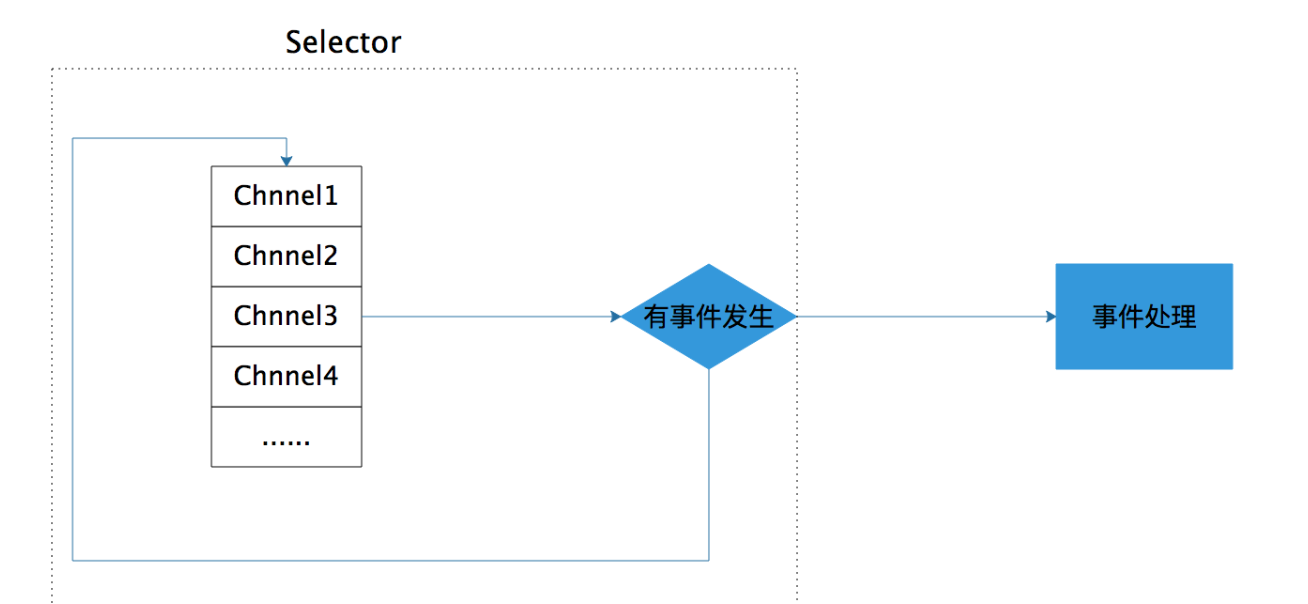
IO多路复用
IO多路复用(IO Multiplexing) 是这么一种机制:程序注册一组socket文件描述符给操作系统,表示“我要监视这些fd是否有IO事件发生,有了就告诉程序处理”。
IO多路复用是要和NIO一起使用的。尽管在操作系统级别,NIO和IO多路复用是两个相对独立的事情。NIO仅仅是指IO API总是能立刻返回,不会被Blocking;而IO多路复用仅仅是操作系统提供的一种便利的通知机制。操作系统并不会强制这俩必须得一起用——你可以用NIO,但不用IO多路复用,就像上一节中的代码;也可以只用IO多路复用 + BIO,这时效果还是当前线程被卡住。但是,IO多路复用和NIO是要配合一起使用才有实际意义。因此,在使用IO多路复用之前,请总是先把fd设为O_NONBLOCK。
对IO多路复用,还存在一些常见的误解,比如:
-
❌IO多路复用是指多个数据流共享同一个Socket。其实IO多路复用说的是多个Socket,只不过操作系统是一起监听他们的事件而已。
多个数据流共享同一个TCP连接的场景的确是有,比如Http2 Multiplexing就是指Http2通讯中中多个逻辑的数据流共享同一个TCP连接。但这与IO多路复用是完全不同的问题。
-
❌IO多路复用是NIO,所以总是不Block的。其实IO多路复用的关键API调用(
select,poll,epoll_wait)总是Block的,正如下文的例子所讲。 -
❌IO多路复用和NIO一起减少了IO。实际上,IO本身(网络数据的收发)无论用不用IO多路复用和NIO,都没有变化。请求的数据该是多少还是多少;网络上该传输多少数据还是多少数据。IO多路复用和NIO一起仅仅是解决了调度的问题,避免CPU在这个过程中的浪费,使系统的瓶颈更容易触达到网络带宽,而非CPU或者内存。要提高IO吞吐,还是提高硬件的容量(例如,用支持更大带宽的网线、网卡和交换机)和依靠并发传输(例如HDFS的数据多副本并发传输)。
操作系统级别提供了一些接口来支持IO多路复用,最老掉牙的是select和poll。
select
select长这样:
int select(int nfds, fd_set *readfds, fd_set *writefds, fd_set *exceptfds, struct timeval *timeout);
它接受3个文件描述符的数组,分别监听读取(readfds),写入(writefds)和异常(expectfds)事件。那么一个 IO多路复用的代码大概是这样:
struct timeval tv = {.tv_sec = 1, .tv_usec = 0};ssize_t nbytes;
while(1) {FD_ZERO(&read_fds);setnonblocking(fd1);setnonblocking(fd2);FD_SET(fd1, &read_fds);FD_SET(fd2, &read_fds);// 把要监听的fd拼到一个数组里,而且每次循环都得重来一次...if (select(FD_SETSIZE, &read_fds, NULL, NULL, &tv) < 0) { // block住,直到有事件到达perror("select出错了");exit(EXIT_FAILURE);}for (int i = 0; i < FD_SETSIZE; i++) {if (FD_ISSET(i, &read_fds)) {/* 检测到第[i]个读取fd已经收到了,这里假设buf总是大于到达的数据,所以可以一次read完 */if ((nbytes = read(i, buf, sizeof(buf))) >= 0) {process_data(nbytes, buf);} else {perror("读取出错了");exit(EXIT_FAILURE);}}}
}
首先,为了select需要构造一个fd数组(这里为了简化,没有构造要监听写入和异常事件的fd数组)。之后,用select监听了read_fds中的多个socket的读取时间。调用select后,程序会Block住,直到一个事件发生了,或者等到最大1秒钟(tv定义了这个时间长度)就返回。之后,需要遍历所有注册的fd,挨个检查哪个fd有事件到达(FD_ISSET返回true)。如果是,就说明数据已经到达了,可以读取fd了。读取后就可以进行数据的处理。
select有一些发指的缺点:
select能够支持的最大的fd数组的长度是1024。这对要处理高并发的web服务器是不可接受的。- fd数组按照监听的事件分为了3个数组,为了这3个数组要分配3段内存去构造,而且每次调用
select前都要重设它们(因为select会改这3个数组);调用select后,这3数组要从用户态复制一份到内核态;事件到达后,要遍历这3数组。很不爽。 select返回后要挨个遍历fd,找到被“SET”的那些进行处理。这样比较低效。select是无状态的,即每次调用select,内核都要重新检查所有被注册的fd的状态。select返回后,这些状态就被返回了,内核不会记住它们;到了下一次调用,内核依然要重新检查一遍。于是查询的效率很低。
poll
poll与select类似于。它大概长这样:
int poll(struct pollfd *fds, nfds_t nfds, int timeout);
poll的代码例子和select差不多,因此也就不赘述了。有意思的是poll这个单词的意思是“轮询”,所以很多中文资料都会提到对IO进行“轮询”。
上面说的select和下文说的epoll本质上都是轮询。
poll优化了select的一些问题。比如不再有3个数组,而是1个polldfd结构的数组了,并且也不需要每次重设了。数组的个数也没有了1024的限制。但其他的问题依旧:
- 依然是无状态的,性能的问题与
select差不多一样; - 应用程序仍然无法很方便的拿到那些“有事件发生的fd“,还是需要遍历所有注册的fd。
目前来看,高性能的web服务器都不会使用select和poll。他们俩存在的意义仅仅是“兼容性”,因为很多操作系统都实现了这两个系统调用。
如果是追求性能的话,在BSD/macOS上提供了kqueue api;在Salorias中提供了/dev/poll(可惜该操作系统已经凉凉);而在Linux上提供了epoll api。它们的出现彻底解决了select和poll的问题。Java NIO,nginx等在对应的平台的上都是使用这些api实现。
因为大部分情况下我会用Linux做服务器,所以下文以Linux epoll为例子来解释多路复用是怎么工作的。
用epoll实现的IO多路复用
epoll是Linux下的IO多路复用的实现。这里单开一章是因为它非常有代表性,并且Linux也是目前最广泛被作为服务器的操作系统。细致的了解epoll对整个IO多路复用的工作原理非常有帮助。
与select和poll不同,要使用epoll是需要先创建一下的。
int epfd = epoll_create(10);
epoll_create在内核层创建了一个数据表,接口会返回一个“epoll的文件描述符”指向这个表。注意,接口参数是一个表达要监听事件列表的长度的数值。但不用太在意,因为epoll内部随后会根据事件注册和事件注销动态调整epoll中表格的大小。

epoll创建
为什么epoll要创建一个用文件描述符来指向的表呢?这里有两个好处:
- epoll是有状态的,不像
select和poll那样每次都要重新传入所有要监听的fd,这避免了很多无谓的数据复制。epoll的数据是用接口epoll_ctl来管理的(增、删、改)。 - epoll文件描述符在进程被fork时,子进程是可以继承的。这可以给对多进程共享一份epoll数据,实现并行监听网络请求带来便利。但这超过了本文的讨论范围,就此打住。
epoll创建后,第二步是使用epoll_ctl接口来注册要监听的事件。
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
其中第一个参数就是上面创建的epfd。第二个参数op表示如何对文件名进行操作,共有3种。
EPOLL_CTL_ADD- 注册一个事件EPOLL_CTL_DEL- 取消一个事件的注册EPOLL_CTL_MOD- 修改一个事件的注册
第三个参数是要操作的fd,这里必须是支持NIO的fd(比如socket)。
第四个参数是一个epoll_event的类型的数据,表达了注册的事件的具体信息。
typedef union epoll_data {void *ptr;int fd;uint32_t u32;uint64_t u64;
} epoll_data_t;struct epoll_event {uint32_t events; /* Epoll events */epoll_data_t data; /* User data variable */
};
比方说,想关注一个fd1的读取事件事件,并采用边缘触发(下文会解释什么是边缘触发),大概要这么写:
struct epoll_data ev;
ev.events = EPOLLIN | EPOLLET; // EPOLLIN表示读事件;EPOLLET表示边缘触发
ev.data.fd = fd1;
通过epoll_ctl就可以灵活的注册/取消注册/修改注册某个fd的某些事件。

管理fd事件注册
第三步,使用epoll_wait来等待事件的发生。
int epoll_wait(int epfd, struct epoll_event *evlist, int maxevents, int timeout);
特别留意,这一步是"block"的。只有当注册的事件至少有一个发生,或者timeout达到时,该调用才会返回。这与select和poll几乎一致。但不一样的地方是evlist,它是epoll_wait的返回数组,里面只包含那些被触发的事件对应的fd,而不是像select和poll那样返回所有注册的fd。

监听fd事件
综合起来,一段比较完整的epoll代码大概是这样的。
#define MAX_EVENTS 10
struct epoll_event ev, events[MAX_EVENTS];
int nfds, epfd, fd1, fd2;// 假设这里有两个socket,fd1和fd2,被初始化好。
// 设置为non blocking
setnonblocking(fd1);
setnonblocking(fd2);// 创建epoll
epfd = epoll_create(MAX_EVENTS);
if (epollfd == -1) {perror("epoll_create1");exit(EXIT_FAILURE);
}//注册事件
ev.events = EPOLLIN | EPOLLET;
ev.data.fd = fd1;
if (epoll_ctl(epollfd, EPOLL_CTL_ADD, fd1, &ev) == -1) {perror("epoll_ctl: error register fd1");exit(EXIT_FAILURE);
}
if (epoll_ctl(epollfd, EPOLL_CTL_ADD, fd2, &ev) == -1) {perror("epoll_ctl: error register fd2");exit(EXIT_FAILURE);
}// 监听事件
for (;;) {nfds = epoll_wait(epdf, events, MAX_EVENTS, -1);if (nfds == -1) {perror("epoll_wait");exit(EXIT_FAILURE);}for (n = 0; n < nfds; ++n) { // 处理所有发生IO事件的fdprocess_event(events[n].data.fd);// 如果有必要,可以利用epoll_ctl继续对本fd注册下一次监听,然后重新epoll_wait}
}
此外,epoll的手册 中也有一个简单的例子。
所有的基于IO多路复用的代码都会遵循这样的写法:注册——监听事件——处理——再注册,无限循环下去。
epoll的优势
为什么epoll的性能比select和poll要强呢? select和poll每次都需要把完成的fd列表传入到内核,迫使内核每次必须从头扫描到尾。而epoll完全是反过来的。epoll在内核的数据被建立好了之后,每次某个被监听的fd一旦有事件发生,内核就直接标记之。epoll_wait调用时,会尝试直接读取到当时已经标记好的fd列表,如果没有就会进入等待状态。
同时,epoll_wait直接只返回了被触发的fd列表,这样上层应用写起来也轻松愉快,再也不用从大量注册的fd中筛选出有事件的fd了。
简单说就是select和poll的代价是"O(所有注册事件fd的数量)",而epoll的代价是"O(发生事件fd的数量)"。于是,高性能网络服务器的场景特别适合用epoll来实现——因为大多数网络服务器都有这样的模式:同时要监听大量(几千,几万,几十万甚至更多)的网络连接,但是短时间内发生的事件非常少。
但是,假设发生事件的fd的数量接近所有注册事件fd的数量,那么epoll的优势就没有了,其性能表现会和poll和select差不多。
epoll除了性能优势,还有一个优点——同时支持水平触发(Level Trigger)和边沿触发(Edge Trigger)。
水平触发和边沿触发
默认情况下,epoll使用水平触发,这与select和poll的行为完全一致。在水平触发下,epoll顶多算是一个“跑得更快的poll”。
而一旦在注册事件时使用了EPOLLET标记(如上文中的例子),那么将其视为边沿触发(或者有地方叫边缘触发,一个意思)。那么到底什么水平触发和边沿触发呢?
考虑下图中的例子。有两个socket的fd——fd1和fd2。我们设定监听f1的“水平触发读事件“,监听fd2的”边沿触发读事件“。我们使用在时刻t1,使用epoll_wait监听他们的事件。在时刻t2时,两个fd都到了100bytes数据,于是在时刻t3, epoll_wait返回了两个fd进行处理。在t4,我们故意不读取所有的数据出来,只各自读50bytes。然后在t5重新注册两个事件并监听。在t6时,只有fd1会返回,因为fd1里的数据没有读完,仍然处于“被触发”状态;而fd2不会被返回,因为没有新数据到达。

水平触发和边沿触发
这个例子很明确的显示了水平触发和边沿触发的区别。
-
水平触发只关心文件描述符中是否还有没完成处理的数据,如果有,不管怎样
epoll_wait,总是会被返回。简单说——水平触发代表了一种“状态”。 -
边沿触发只关心文件描述符是否有新的事件产生,如果有,则返回;如果返回过一次,不管程序是否处理了,只要没有新的事件产生,
epoll_wait不会再认为这个fd被“触发”了。简单说——边沿触发代表了一个“事件”。那么边沿触发怎么才能迫使新事件产生呢?一般需要反复调用
read/write这样的IO接口,直到得到了EAGAIN错误码,再去尝试epoll_wait才有可能得到下次事件。
那么为什么需要边沿触发呢?
边沿触发把如何处理数据的控制权完全交给了开发者,提供了巨大的灵活性。比如,读取一个http的请求,开发者可以决定只读取http中的headers数据就停下来,然后根据业务逻辑判断是否要继续读(比如需要调用另外一个服务来决定是否继续读)。而不是次次被socket尚有数据的状态烦扰;写入数据时也是如此。比如希望将一个资源A写入到socket。当socket的buffer充足时,epoll_wait会返回这个fd是准备好的。但是资源A此时不一定准备好。如果使用水平触发,每次经过epoll_wait也总会被打扰。在边沿触发下,开发者有机会更精细的定制这里的控制逻辑。
但不好的一面时,边沿触发也大大的提高了编程的难度。一不留神,可能就会miss掉处理部分socket数据的机会。如果没有很好的根据EAGAIN来“重置”一个fd,就会造成此fd永远没有新事件产生,进而导致饿死相关的处理代码。
再来思考一下什么是“Block”
上面的所有介绍都在围绕如何让网络IO不会被Block。但是网络IO处理仅仅是整个数据处理中的一部分。如果你留意到上文例子中的“处理事件”代码,就会发现这里可能是有问题的。
- 处理代码有可能需要读写文件,可能会很慢,从而干扰整个程序的效率;
- 处理代码有可能是一段复杂的数据计算,计算量很大的话,就会卡住整个执行流程;
- 处理代码有bug,可能直接进入了一段死循环……
这时你会发现,这里的Block和本文之初讲的O_NONBLOCK是不同的事情。在一个网络服务中,如果处理程序的延迟远远小于网络IO,那么这完全不成问题。但是如果处理程序的延迟已经大到无法忽略了,就会对整个程序产生很大的影响。这时IO多路复用已经不是问题的关键。
试分析和比较下面两个场景:
- web proxy。程序通过IO多路复用接收到了请求之后,直接转发给另外一个网络服务。
- web server。程序通过IO多路复用接收到了请求之后,需要读取一个文件,并返回其内容。
它们有什么不同?它们的瓶颈可能出在哪里?
总结
小结一下本文:
- 对于socket的文件描述符才有所谓BIO和NIO。
- 多线程+BIO模式会带来大量的资源浪费,而NIO+IO多路复用可以解决这个问题。
- 在Linux下,基于epoll的IO多路复用是解决这个问题的最佳方案;epoll相比
select和poll有很大的性能优势和功能优势,适合实现高性能网络服务。
但是IO多路复用仅仅是解决了一部分问题,另外一部分问题如何解决呢?且听下回分解。
文章写的通俗易懂,原文转至:
作者:大宽宽
链接:https://www.jianshu.com/p/ef418ccf2f7d
来源:简书