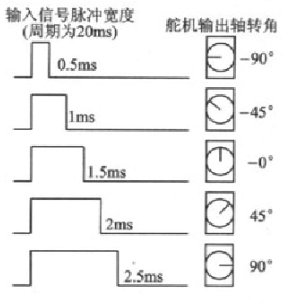
本次分享stm32对多个舵机的控制,之前讲解过单个舵机的控制。以及控制原理,定时器的使用和pwm的输出来控制一个舵机的角度转向。这次就和大家分享一下多个舵机的控制以及调速。利用单片机实现对 8 个舵机的同时控制,掌握多个舵机控制程序实现方法。从单个舵机控制到多个舵机控制,理解定时器的分时复用。为扩展控制 16 路,24 路舵机打下坚实的基础。
多个舵机控制如下图所示
16路舵机控制板子(维特智能)

多个舵机控制方案
利用单个定时器中断法。该方案的实现方法是将舵机 20ms 的周期分解成若干份(由于舵机控制信号的最大高电平时间为 2.5 毫秒,故一般分成 8 份以上), 每一份时间完成一个舵机的控制。以将 20ms 平均分解成 8 份为例进行说明:单片机上电初始化时,先将所有的 IO 端口电平拉低;当定时器产生第一次溢出中断时,在中断服务程序中对定时器计数寄存器重新赋值,所赋值为第一个受控舵机控制信号的高电平时间值,并将 IO 口拉高;当定时器产生第二次中断时,继续给寄存器重新赋值,此次所赋值为 2.5ms 减去高电平所得时间值;剩下的17.5ms 时间内重复七次上述操作,这样即可同时完成 8 个舵机的控制。
每20mm的周期,把每个周期分为8分,每份2.5mm 控制一个舵机,总共控制8个舵机
参考demo 本次使用stm32f103 c8t6
主函数
int main(void)
{ SysTick_Init(); //系统滴答定时器初始化 Servor_GPIO_Config();Timer_Init();Timer_ON();while (1){ for(i=0;i<8;i++) //每个舵机到0度{CPWM[i]=500; //给PWM舵机一个0.5ms的高电平脉冲,传入到定时器2 }Delay_ms(1000); for(i=0;i<8;i++) //每个舵机到180度{CPWM[i]=2500;//给PWM舵机一个2.5ms的高电平脉冲,传入到定时器2 } Delay_ms(1000); }
}
初始化i/o口
void Servor_GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOA, ENABLE);GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE);GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable , ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOA, &GPIO_InitStructure);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB,ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOB, &GPIO_InitStructure);}
GPIO电平反转函数
//整个周期20ms,把每个周期分为8分,每份2.5mm 控制一个舵机,总共控制8个舵机,2.5mm 分为两个动作去做,每两个动作控制一个舵机一共16个动作,就是分时复用法,把时间分成几份去做单独的控制。
void Flip_GPIO_One(void)
{switch(count1) //将20ms的舵机控制周期分成8份,每2.5ms控制一个舵机运转{ //每个定时器控制8路舵机运转,3个定时器控制24路舵机运转case 1: TIM2->ARR=CPWM[1]; //0.5ms //将第一个舵机脉冲宽度值赋值给定时器2 GPIO_SetBits(GPIOB,GPIO_Pin_15); //同时拉高控制舵机1的引脚的电break;case 2:TIM2->ARR=MAXPWM-CPWM[1]; //2ms //将2.5ms减去PWM脉宽值的数据赋值定时器2GPIO_ResetBits(GPIOB,GPIO_Pin_15);//同时拉低控制舵机1引脚的电平 break; //控制舵机1的引脚在剩下20ms-CPM[0]时间内将一直保持低电平,舵机1按照CPWM值转动case 3: TIM2->ARR=CPWM[2]; GPIO_SetBits(GPIOA,GPIO_Pin_8);break;case 4: TIM2->ARR=MAXPWM-CPWM[2]; GPIO_ResetBits(GPIOA,GPIO_Pin_8); break;case 5: TIM2->ARR=CPWM[3]; GPIO_SetBits(GPIOB,GPIO_Pin_5); break;case 6: TIM2->ARR=MAXPWM-CPWM[3]; GPIO_ResetBits(GPIOB,GPIO_Pin_5); break;case 7: TIM2->ARR=CPWM[4]; GPIO_SetBits(GPIOB,GPIO_Pin_4); break;case 8: TIM2->ARR=MAXPWM-CPWM[4]; GPIO_ResetBits(GPIOB,GPIO_Pin_4);break;case 9: TIM2->ARR=CPWM[5]; GPIO_SetBits(GPIOB,GPIO_Pin_3); break;case 10:TIM2->ARR=MAXPWM-CPWM[5]; GPIO_ResetBits(GPIOB,GPIO_Pin_3);break;case 11:TIM2->ARR=CPWM[6]; GPIO_SetBits(GPIOA,GPIO_Pin_15); break;case 12:TIM2->ARR=MAXPWM-CPWM[6]; GPIO_ResetBits(GPIOA,GPIO_Pin_15);break;case 13:TIM2->ARR=CPWM[7]; break;case 14:TIM2->ARR=MAXPWM-CPWM[7]; break;case 15:TIM2->ARR=CPWM[8]; break;case 16:TIM2->ARR=MAXPWM-CPWM[8]; count1=0; break;default:break;} //count1++;
}
舵机控制函数1
void Servo1(void) //time2 中断里面去调用
{ count1++; Flip_GPIO_One(); //反转IO电平}
控制舵机速度方案
脉冲细分法。改方案的具体实现操作位:将预期 PWM 值分解成若干 PWM 值,每个 PWM 值对应舵机一个角度,即让舵机从起始位置转动若干次后到达预期位置。由于舵机控制信号的周期为 20ms,忽略舵机的实际转动时间,每产生一次预期 PWM 值,舵机将转动 N 次,将需要 20*Nms 的时间,如此可达到调速的目的。
控制舵机从500-2500之间运行
每次脉宽控制到(2500-500)/n次=脉宽值
通过调整脉宽值进行平滑运行。
/***************************************************************************************************************
函 数 名:作业初位置,末尾置更新函数
功能描述:从缓存中取一个新的目标位置替换原来的目标位置,原来的目标位置变为新的初位置,一次更替:有效的数据是插补增量,和插补次数,知道这两个量,和当前初位置即可
备 注: 先进先出,循环访问
****************************************************************************************************************/ void change(void)
{ unsigned char s;if(point_aim==1){point_aim=0;point_now=1;}else{point_aim=1;point_now=0;}n=pos[point_aim][0]/20; //计算新的插补次数 for(s=1;s<9;s++) //计算新的插补增量{if(pos[point_aim][s]>pos[point_now][s]){dp=pos[point_aim][s]-pos[point_now][s];dp0[s]=dp/n;}if(pos[point_aim][s]<=pos[point_now][s]){dp=pos[point_now][s]-pos[point_aim][s];dp0[s]=dp/n;dp0[s]=-dp0[s];}}m=0; //m清0}
/***************************************************************************************************************
函 数 名:vpwm()
功能描述:数据插补,插补时间间隔为20/12ms,由timer0控制,使舵机平滑实现速度控制:另一个功能是执行完一行后去更新下一行数据,即调用change()
备 注:
****************************************************************************************************************/
void vpwm(void)
{unsigned char j=0;static unsigned char flag_Tover;m++; //用来累加插补过的次数if(m==n) //n是本行作业要插补的总次数{flag_Tover=1; //一行数据的执行时间已经完成}for(j=1;j<9;j++){if(abs(CPWM[j]-pos[point_aim][j])<5){ //检测靠近终点位置// how++; //是,则累加一个CPWM[j]=pos[point_aim][j];//并且直接过度到终点位置} else //不靠近终点,继续插补{CPWM[j]=pos[point_now][j]+m*dp0[j];}} if(flag_Tover==1){ //从插补次数,和脉宽宽度两方面都到达终点,本作业行完成flag_Tover=0;change();}//return;}
总结
分时复用法
脉冲细分法
对于stm32针对单个舵机控制的原理上一次已经分享大家可以看一下上一期