雅可比矩阵:一个多元函数的一阶偏导数以一定方式排列成的矩阵
黑塞矩阵:一个多元函数的二阶偏导数以一定方式排列成的矩阵
-
雅可比矩阵
在向量微积分中,雅可比 矩阵是一阶 偏导数以一定方式排列成的矩阵,其行列式称为 雅可比行列式。雅可比矩阵的重要性在于它体现了一个可微 方程与给出点的最优线性逼近。因此,雅可比矩阵类似于多元函数的导数。
定义
在向量分析中,雅可比矩阵是函数的一阶偏导数以一定方式排列成的矩阵,其行列式称为雅可比行列式。
在代数几何中,代数曲线的雅可比行列式表示雅可比簇:伴随该曲线的一个代数群,曲线可以嵌入其中。
它们全部都以数学家卡尔·雅可比命名;英文雅可比行列式"Jacobian"可以发音为[ja ˈko bi ən]或者[ʤə ˈko bi ən]。
假设某函数从  映到
映到  , 其雅可比矩阵是从 到 的线性映射,其重要意义在于它表现了一个多变数向量函数的最佳线性逼近。因此,雅可比矩阵类似于单变数函数的导数。 假设
, 其雅可比矩阵是从 到 的线性映射,其重要意义在于它表现了一个多变数向量函数的最佳线性逼近。因此,雅可比矩阵类似于单变数函数的导数。 假设  是一个从n维欧氏空间映射到到m维欧氏空间的函数。这个函数由m个实函数组成:
是一个从n维欧氏空间映射到到m维欧氏空间的函数。这个函数由m个实函数组成:  。这些函数的偏导数(如果存在)可以组成一个m行n列的矩阵,这个矩阵就是所谓的雅可比矩阵:
。这些函数的偏导数(如果存在)可以组成一个m行n列的矩阵,这个矩阵就是所谓的雅可比矩阵:

此矩阵用符号表示为:  ,或者
,或者 
如果p是 中的一点,F在 p点可微分,根据高等微积分,  是在这点的 导数 。在此情况下, 这个线性映射即F在点p附近的最优线性逼近,也就是说当x足够靠近点p时,我们有:
是在这点的 导数 。在此情况下, 这个线性映射即F在点p附近的最优线性逼近,也就是说当x足够靠近点p时,我们有:
实例
由 球坐标系到直角坐标系的转化由F函数给出︰ 
此坐标变换的雅可比矩阵是

其雅可比矩阵为:

此例子说明雅可比矩阵不一定为方阵。
逆矩阵
根据 反函数定理,一个可逆函数(存在 反函数的函数)的雅可比 矩阵的 逆矩阵即为该函数的 反函数的雅可比矩阵。 若函数  在点
在点  的雅可比矩阵是连续且可逆的,则F在点 p的某一邻域内也是可逆的,且有
的雅可比矩阵是连续且可逆的,则F在点 p的某一邻域内也是可逆的,且有
成立。相反,倘若雅可比行列式在某一个点 不为零,那么该函数在这个点的某一邻域内可逆(存在 反函数)。
一个 多项式函数的可逆性与非经证明的雅可比猜想有关。其断言,如果函数的雅可比行列式为一个非零实数(相当于其不存在 复零点),则该函数可逆且其反函数也为一个多项式。
黑塞矩阵
黑塞矩阵(Hessian Matrix),又译作海森矩阵、海瑟矩阵、海塞矩阵等,是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。黑塞矩阵最早于19世纪由德国数学家Ludwig Otto Hesse提出,并以其名字命名。黑塞矩阵常用于牛顿法解决优化问题,利用黑塞矩阵可判定多元函数的极值问题。在工程实际问题的优化设计中,所列的目标函数往往很复杂,为了使问题简化,常常将目标函数在某点邻域展开成泰勒多项式来逼近原函数,此时函数在某点泰勒展开式的矩阵形式中会涉及到黑塞矩阵。
定义
在工程实际问题的优化设计中,所列的目标函数往往很复杂,为了使问题简化,常常将目标函数在某点邻域展开成泰勒多项式来逼近原函数。
二元函数的黑塞矩阵
由高等数学知识可知,若 一元函数在  在
在  点的某个 邻域 内具有任意阶导数 ,则
点的某个 邻域 内具有任意阶导数 ,则  在
在  点处的泰勒展开式 :
点处的泰勒展开式 :  ,其中
,其中  ,
,  。 二元函数
。 二元函数  在
在  点处的泰勒展开式为:
点处的泰勒展开式为:

其中,  。 将上述展开式写成矩阵形式,则有:
。 将上述展开式写成矩阵形式,则有:

即:
其中:

多元函数的黑塞矩阵
将二元函数的泰勒展开式推广到 多元函数, 则  在
在  点处的泰勒展开式的矩阵形式为:
点处的泰勒展开式的矩阵形式为:
其中:
(1)  ,它是
,它是  在 点处的梯度。
在 点处的梯度。
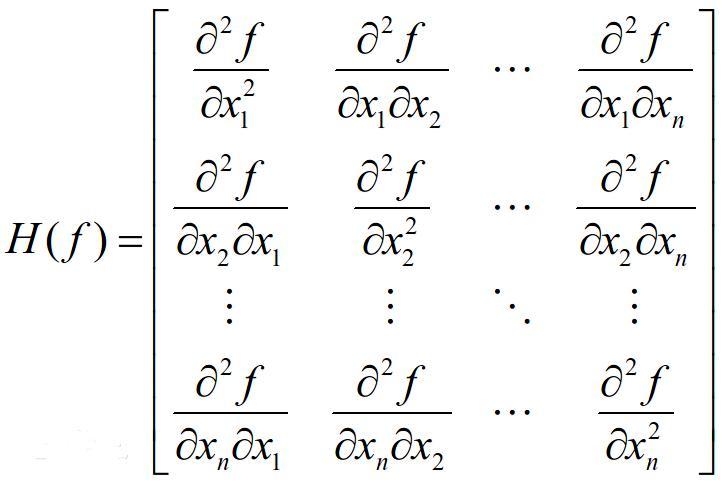
(2)  为函数 在 点处的黑塞矩阵
为函数 在 点处的黑塞矩阵
黑塞矩阵是由目标函数  在点X处的二阶偏导数组成的
在点X处的二阶偏导数组成的  阶 对称矩阵 。
阶 对称矩阵 。
对称性
如果函数  在
在  区域内二阶 连续 可导 ,那么 黑塞矩阵
区域内二阶 连续 可导 ,那么 黑塞矩阵  在 内为 对称矩阵
在 内为 对称矩阵
原因:如果函数 的二阶偏导数连续,则二阶偏导数的求导顺序没有区别,即
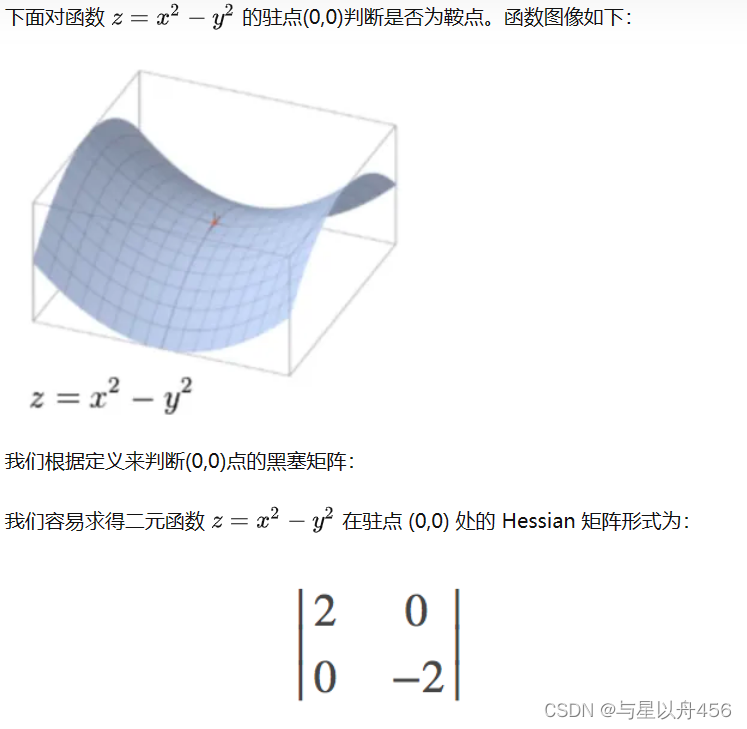
利用黑塞矩阵判定多元函数的极值
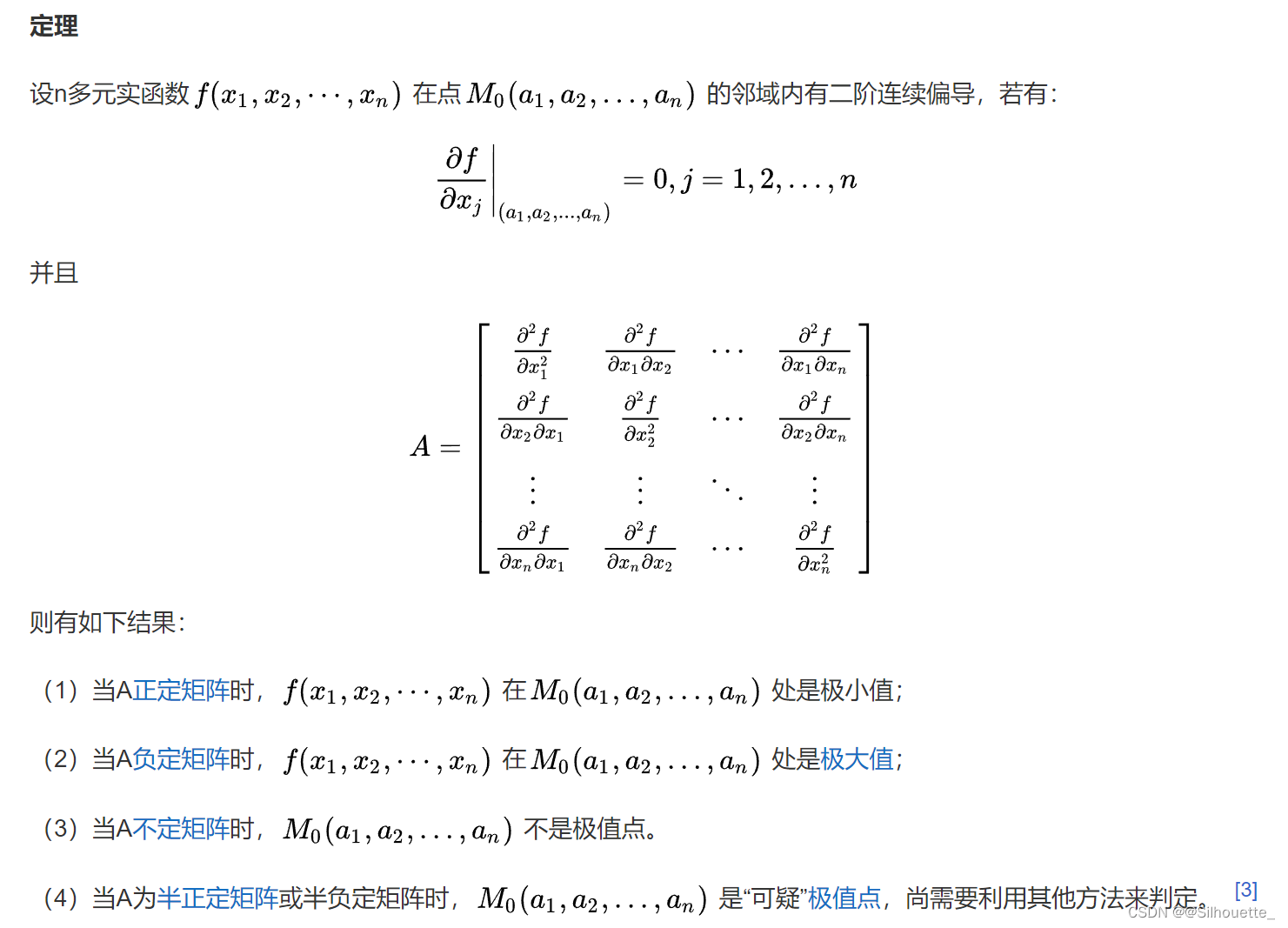
定理
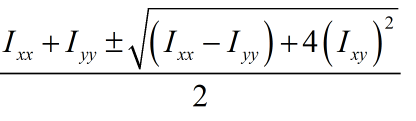
设n多元实函数 在点  的邻域内有二阶连续偏导,若有:
的邻域内有二阶连续偏导,若有:

并且

则有如下结果:
(1) 当A 正定矩阵 时, 在 处是极小值;
(3) 当A 不定矩阵 时, 不是极值点。
(4) 当A为 半正定矩阵 或半负定矩阵时, 是“可疑” 极值点 ,尚需要利用其他方法来判定。
实例
求三元函数  的极值。
的极值。
解:因为  ,故该三元函数的驻点是
,故该三元函数的驻点是  。
。
又因为  ,
,
故有:  因为A是正定矩阵,故 是极小值点,且极小值
因为A是正定矩阵,故 是极小值点,且极小值  。
。
因为A是正定矩阵,故