测量学
lesson 4:
距离测量是确定地面点位时的基本测量工作之一。距离测量的方法有钢尺量距、视距测量和电磁波测距等。
距离测量
钢尺量距:
利用卷钢尺直接沿地面丈量距离。(受地形影响较大,仅用于平坦地区的近距离测量)
地面上两点之间距离较远时,用卷尺一次不能量完,就需要在直线方向上在地面标定若干点,以便卷尺能沿此直线丈量,这项工作称为“直线定线”。方法有目估定线和经纬仪定线。
目估定线:
经纬仪定线: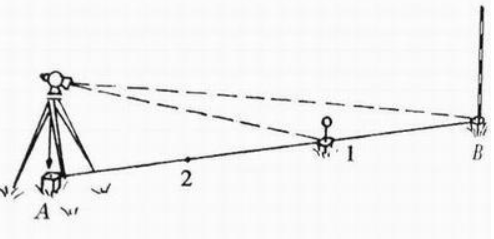
精密钢尺量距:(需要标杆、测钎、垂球、弹簧秤、温度计等)
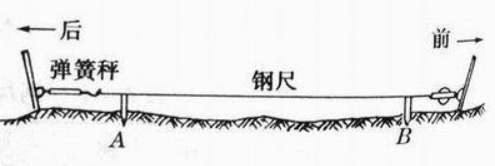
钢尺两端点分划线之间的标准长度称为钢尺的实际长度,端点分划的注记长度称为名义长度。实际长度往往不等于名义长度,存在一个差值。另外,钢尺丈量时的拉力和温度对尺长也有影响,因此需要进行改正。
钢尺丈量的实际长度用尺长方程式表示: l = l 0 + Δ k + α l 0 ( t − t 0 ) l = l_0 + \Delta k + \alpha l_0 (t - t_0) l=l0+Δk+αl0(t−t0)
式中:
l 0 l_0 l0——钢尺的名义长度(m)
Δ k \Delta k Δk——尺长的改正值(mm)
α \alpha α——钢的膨胀系数,其值约为0.0115~0.0125mm /(m ⋅ \cdot ⋅ ℃)
t 0 t_0 t0——标准温度,一般取20℃
t t t——丈量时温度(℃)
精密钢尺量距时必须对所量距离施加尺长改正、温度改正,倾斜改正等。
设钢尺量距时量得的长度为 D ′ D' D′:
-
尺长改正: Δ D k = D ′ Δ k l 0 \Delta D_k = D' \frac{\Delta k}{l_0} ΔDk=D′l0Δk
-
温度改正(测量时温度t): Δ D t = D ′ α ( t − t 0 ) \Delta D_t = D' \alpha (t - t_0) ΔDt=D′α(t−t0)
-
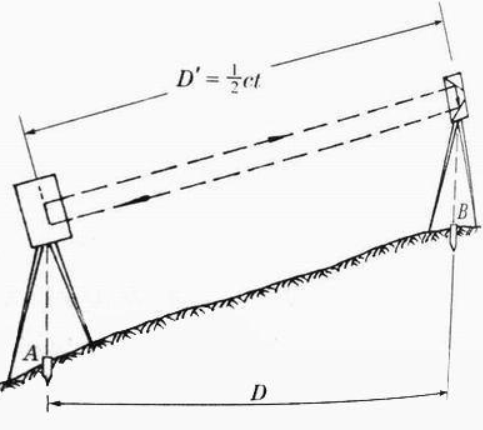
高差改正(高差为h): Δ D h = − h 2 2 D ′ \Delta D_h = -\frac{h^2}{2 D'} ΔDh=−2D′h2
有高差时,测量的是斜距 D ′ , D ′ 2 − D 2 = h 2 D',D'^2 - D^2 = h^2 D′,D′2−D2=h2,所以 ( D ′ − D )( D ′ + D ) = h 2 , (D'-D)(D'+D) = h^2, (D′−D)(D′+D)=h2,有 D ′ − D = h 2 D ′ + D D'-D = \frac{h^2}{D'+D} D′−D=D′+Dh2。当坡度很小的时候,上式分母中 ( D ′ + D ) (D' + D) (D′+D)可以用 2 D ′ 2D' 2D′代替。
改正后的水平距离为: D = D ′ + Δ D k + Δ D t + Δ D h D = D' + \Delta D_k + \Delta D_t + \Delta D_h D=D′+ΔDk+ΔDt+ΔDh
例1:某钢尺的尺长方程为: l = 30 - 0.003 + 1.2 × 1 0 − 5 × 30 × ( t - 20 ℃) l = 30-0.003 + 1.2×10^{-5} × 30 ×(t-20℃) l=30-0.003+1.2×10−5×30×(t-20℃)。现用该钢尺量的AB的距离为100.00m,则距离AB的尺长改正数为(-0.01);
例2:某钢尺的尺长方程式为: L = 30 − 0.003 + 1.25 × 1 0 − 5 × 30 × ( t − 20 ℃) L=30-0.003+1.25×10^{-5}×30×(t-20℃) L=30−0.003+1.25×10−5×30×(t−20℃),若用其在4℃的温度下丈量了60米,则其温度改正数和实际长度分别为(-0.012、59.982)。
距离测量的相对误差:
当测量长度10cm时,中误差为0.5mm;当测量距离5m时,中误差等于0.5mm。 哪种测量较精确?
相对误差: 在测量工作中常以相对误差,即m/D,作为衡量距离测量的精度标准,并把m/D化为1/K的形式。
式中:m是中误差,D是距离的真值。
例1:对一距离进行往、返丈量,其值分别为72.365m和72.353m,则其相对误差为()

平均值 = 72.359 m
差值 = 0.012 m
相对误差为:0.012 / 72.359 = 1 72.359 0.012 \frac{1}{\frac{72.359}{0.012}} 0.01272.3591 = 1 / 6029.917 = ?
假如限差是1 / 6030,那么1 / 6029.917是大于限差的,取1 / 6029 没问题,取1 / 6030 可能就把误差算小了。
例2: 往返丈量直线AB的长度为:其DAB=126.72m, DBA=126.76m相对误差为( )
A.K=1/3100; B.K=1/3200;
视距测量:
视线水平时:
水平视距: D = K L = 100 L D = KL = 100L D=KL=100L
高差: h = i − v h = i - v h=i−v
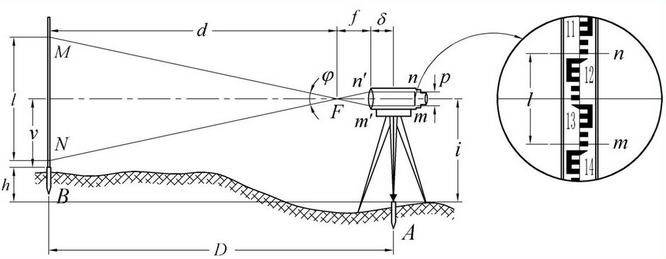
视线倾斜时:
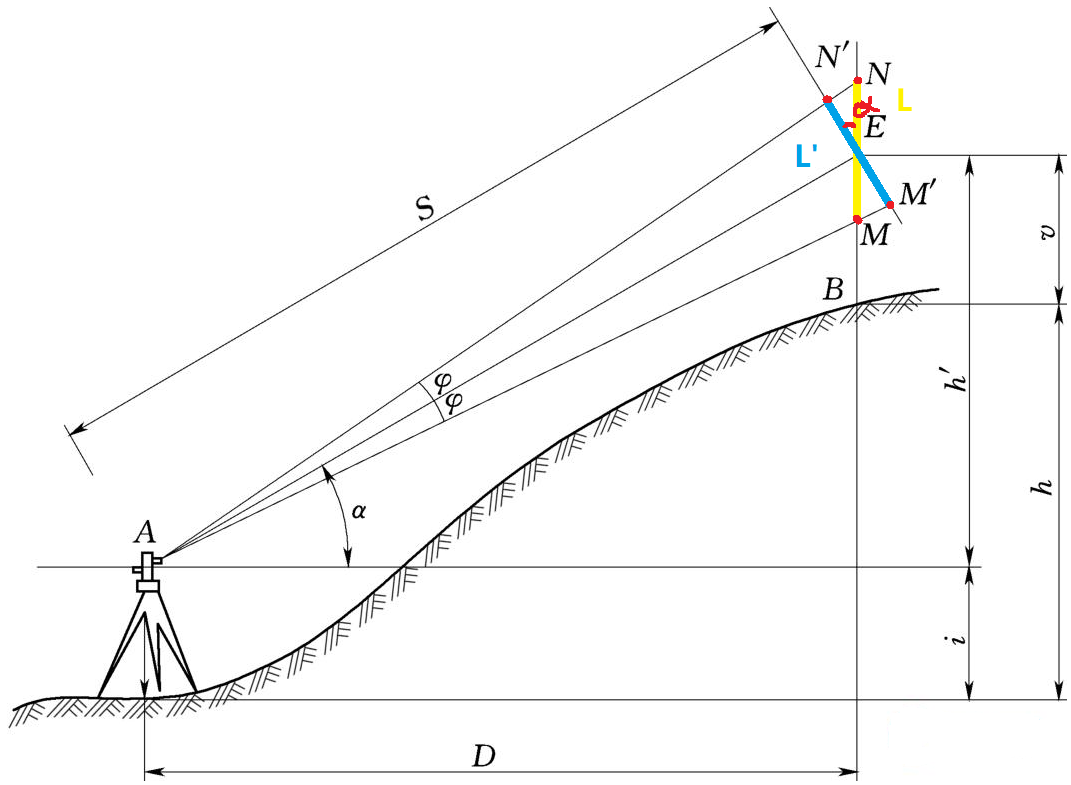
倾斜视距: S = K L ′ S = K L' S=KL′
由于 φ \varphi φ角很小,所以可以把 ∠ N N ′ M ′ ∠NN'M' ∠NN′M′和 ∠ M M ′ N ′ ∠MM'N' ∠MM′N′看做直角,那么 L ′ = L c o s α L' = Lcos \alpha L′=Lcosα
将倾斜视距换成水平视距D: D = S c o s α = K L ′ c o s α = K L c o s 2 α D = S cos \alpha = K L' cos \alpha = K L cos^2 \alpha D=Scosα=KL′cosα=KLcos2α
这时候量取仪器高i和觇标高(中丝读数) v v v,可以求出两点间的高差: h A B = S s i n α + i − v h_{AB} = S sin \alpha + i - v hAB=Ssinα+i−v 或者 h A B = D t a n α + i − v h_{AB} = D tan \alpha + i - v hAB=Dtanα+i−v 。
这种通过测量两点间距离和竖直角来测量两点间高差的方法叫三角高程测量。
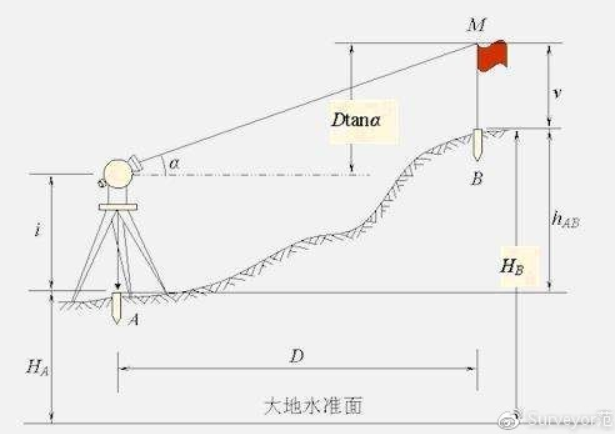
上面设大地水准面和通过A、B点的水平面为相互平行的平面,在较近的距离(例如200米)内可以认为是这样的。
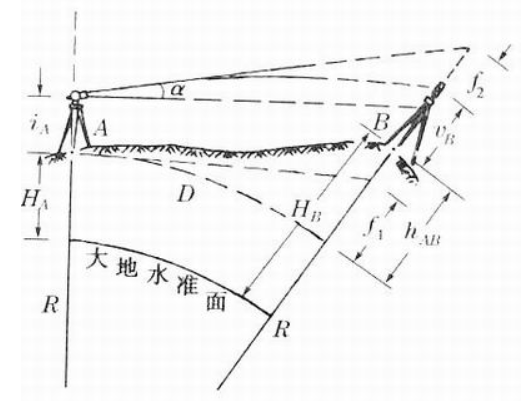
但事实上高程的起算面——大地水准面是一曲面,因此由三角高程测量公式计算的高差应进行地球曲率影响的改正,称为球差改正 f 1 f1 f1。另外,由于视线受大气垂直折光影响而成为一条向上凸的曲线,使视线的切线方向向上抬高,测得竖直角偏大,所以三角高程测量还应进行大气折光影响的改正,称为气差改正 f 2 f2 f2, f 2 f2 f2恒为负值。
上述两项误差改正称为两差改正(球气差改正)。
电磁波测距:
是利用电磁波作为载波传输测距信号以测定两点间距离的一种方法,具有测程远、精度高、作业快、不受地形限制等优点。
电磁波测距仪根据载波的不同可以分为:
- 微波测距仪(以微波作为载体)(测程可达数十千米,多用于大地测量)
- 光电测距仪(以光波作为载体)
- 红外测距仪(体积小、测距快、功耗小,但是测程短,多用于全站仪,进行小面积控制测量和地形测量)
- 激光测距仪
电磁波测距原理:通过测量电磁波在待测距离上往返一次所经历的时间来确定两点之间的距离。
其中 c = c 0 n c = \frac{c_0}{n} c=nc0, c 0 c_0 c0为真空中光速约为 3 × 1 0 6 k m / s 3 \times 10^6 km/s 3×106km/s ;n为大气折射率,与温度、湿度、气压和工作波长有关。所以测距时还需要测量气象元素,对距离进行气象改正。
电磁波测距的精度与时间测量的精度有很大关系,例如当要求测距误差小于1cm时,时间测定的精度必须准确到 6.7 × 1 0 − 11 s 6.7 \times 10^{-11} s 6.7×10−11s。
根据测量时间方法的不同,电磁波测距又可以分为脉冲法测距、相位法测距和脉冲-相位法混合测距。
脉冲法测距:将发射光波的光调制成一定频率的尖脉冲,通过测量发射的脉冲波在待测距离上往返传播的时间来计算距离。
通过时钟脉冲来计数,设时钟脉冲的振荡频率为 f 0 f_0 f0,周期为 T 0 = 1 f 0 T_0 = \frac{1}{f_0} T0=f01,计时器记录的时钟脉冲个数为 q q q,则 t 2 D = q T 0 = q f 0 t_{2D} = q T_0 = \frac{q}{f_0} t2D=qT0=f0q。
电子计数器只能记忆整个时钟脉冲,所以不够一个时钟脉冲周期的事件就会被丢弃,有一定的误差。
相位法测距:将发射光波的光调制成正弦波的形式,通过测量正弦波在待测距离上往返传播的相位差间接测定时间来计算距离。
t 2 D = 1 f ( N + Δ N ) t_{2D} = \frac{1}{f}(N + \Delta N) t2D=f1(N+ΔN)
测距公式为: D = λ s 2 ( N + Δ N ) D = \frac{\lambda_s}{2}(N + \Delta N) D=2λs(N+ΔN)
N为整尺段数, Δ N \Delta N ΔN为不足一个整尺段的余数。可以看出,测距仪就是在用 λ s 2 \frac{\lambda_s}{2} 2λs的长度用来测量距离的。

如果可以测量出N为和 Δ N \Delta N ΔN,即可计算出距离。
但是,测距仪的测相装置(相位计)只能测定不足一个整周期的相位差 Δ N \Delta N ΔN,其测相误差一般小于1/1000。相位计测不出整周数N,使相位式测距方程式产生多值解。只有当待测距离小于光尺长度时,此时N=0,距离方可以确定。通过改变电磁波频率,设置多个测尺、用不同的测尺分别测距,将测距结果组合起来解决距离的多值解问题。
通常采用两个“测尺”配合使用满足测程和精度的要求。一“测尺”的调制频率为15MHz,测尺长度为10m,能测定小于10m的数据,测距误差为±1cm,用来确定分米、厘米、毫米位数,以保证测距精度,称为“精尺”;另一“测尺”的调制频率为150kHz,测尺长度为1000m,能测定小于1000m的距离,测距误差为士1m,用来确定米、十米、百米位数,以满足测程要求,称为“粗尺”。将两尺所测数值组合起来,即可直接显示精确的测距数字。
脉冲-相位法混合测距:通过发射和接收脉冲信号的时间差实现对距离的粗测,用发射和接收连续信号之间的相位差来实现距离的精测。
总结:
-
脉冲式测距仪有测距精度低、体积较大的缺点。
-
相位式测距仪有测程近、需要协作目标的缺点。
-
脉冲-相位式测距仪能实现远程精密测距,具有脉冲式激光测距无合作目标的测距性能;具有相位式激光仪高的测量精度;能实现对被测目标的连续跟踪测量;能进行漫反射无合作目标和有合作目标两种方式测距;体积小,重量轻。
精密电磁波测距的改正:
-
常数改正
加常数和乘常数,例如全站仪标称测距精度为±(1mm+2ppm)
1mm+2ppm是人们通常对1mm+2ppm×D(公里)的缩写。
-
1mm,代表仪器的固定误差,主要是由仪器加常数的测定误差、对中误差、测相误差造成的,固定误差与测量的距离没有关系。
-
2ppm×D(公里)代表比例误差,其中的2是比例误差系数,它主要由仪器频率误差、大气折射率误差引起。ppm是百万分之(几)的意思,D是全站仪或者测距仪实际测量的距离值,单位是公里。
例如:对于一台测距精度为1mm+2ppm的全站仪或者测距仪,当被测量距离为1公里时,仪器的测距精度为1mm+2ppm×1(公里)=3mm,也就是说,全站仪测距1公里,最大测距误差不大于3mm。(不足1公里按1公里计算)
-
-
气象改正
-
高差改正
目前,人们将光电测距仪与电子经纬仪集成在一起,构成电子全站仪。
手持激光测距仪(目前最常见的光电测距仪,不需要反射棱镜也可以获取高精度的距离):

直线定向
直线定向:确定直线与一基本方向线之间的水平夹角,以表达直线方位。
方位角:是从某点的北方向线起,依顺时针方向到目标方向线之间的水平夹角。
三北方向:
磁北、坐标北和真北方向统称为三北方向。
磁北方向:在地球磁场作用下,磁针在某点自由静止时其轴线所指的方向。
(磁子午线是连接南北磁极的线,其实就是磁感线,所以也可以说磁子午线方向是过地球某点的磁子午线的切线方向)
真北方向:通过地球表面某点的真子午线的切线方向。
(真子午线:真子午线是在地面上连接两极的线,表示南北方向)
坐标北方向:在高斯平面直角坐标系中,坐标纵轴方向。
磁方位角 :磁北顺时针转至某直线的夹角,叫做该直线的磁方位角。
真方位角:真北顺时针转至某直线的夹角称为该直线的真方位角,以 A A A表示(0°~360°)。
坐标方位角:坐标北顺时针转至某直线的夹角称为该直线的坐标方位角,以 α \alpha α表示(0°~360°)。
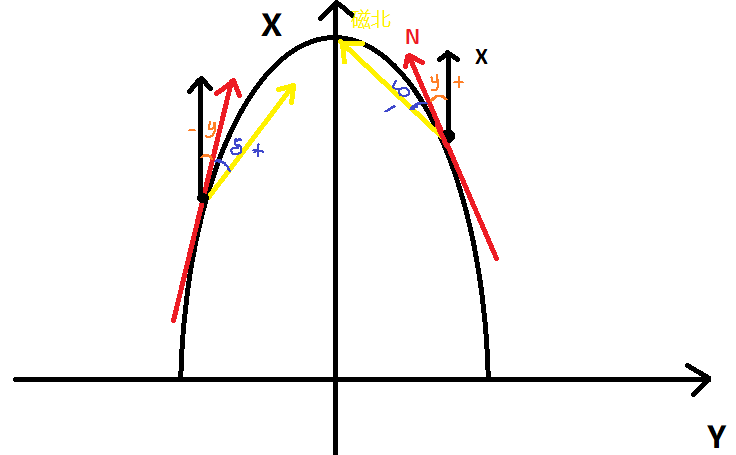
磁偏角:磁北与真北两者之间的夹角称为磁偏角,以δ表示。且当磁北偏于真北以东时,δ为正,当磁北偏于真北以西时,δ为负。
子午线收敛角 :除中央子午线及赤道上的点以外任何一点的真北方向N与坐标北X都不重合。两者之间的夹角称为该点的子午线收敛角,以γ表示。且当坐标北偏于真北以东时,γ为正,当坐标北偏于真北以西时,γ为负。
关系:
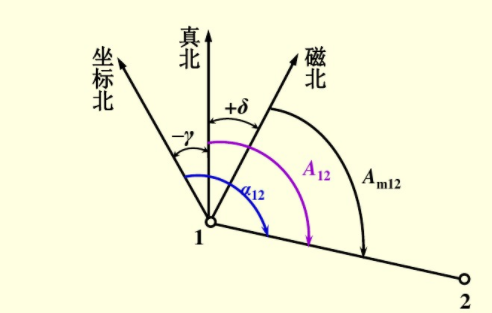
- 磁方位角 A m 12 A_{m12} Am12 + 磁偏角 δ \delta δ = 真方位角 A 12 A_{12} A12
- 坐标方位角 α 12 \alpha_{12} α12 + 子午线收敛角 γ \gamma γ = 真方位角 A 12 A_{12} A12
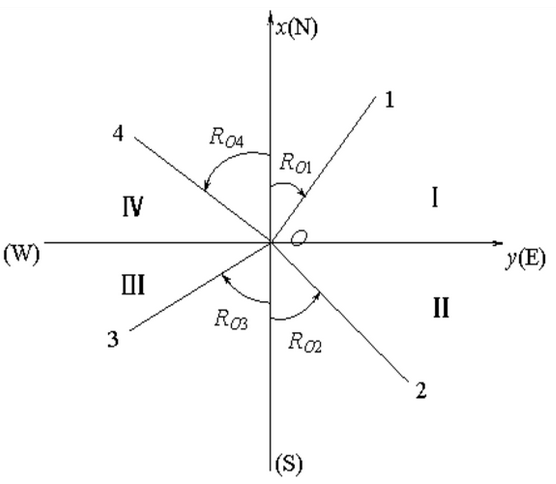
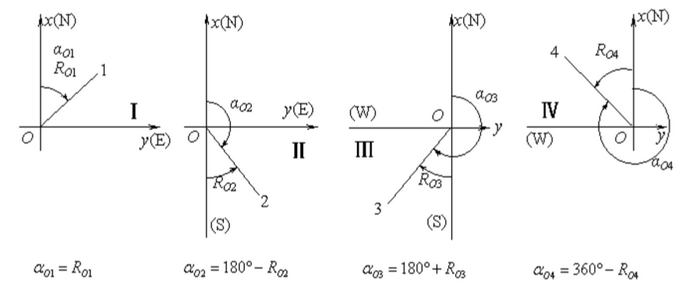
象限角:
由坐标纵轴的北端或南端起,沿顺时针或逆时针方向量至直线的锐角,称为该直线的象限角。用R表示,其角值范围为0°~90°。如图所示,直线 O 1 O1 O1、 O 2 O2 O2、 O 3 O3 O3和 O 4 O4 O4的象限角分别为北东 R O 1 R_{O1} RO1、南东 R O 2 R_{O2} RO2、南西 R O 3 R_{O3} RO3和北西 R O 4 R_{O4} RO4。
坐标方位角与象限角的换算关系:
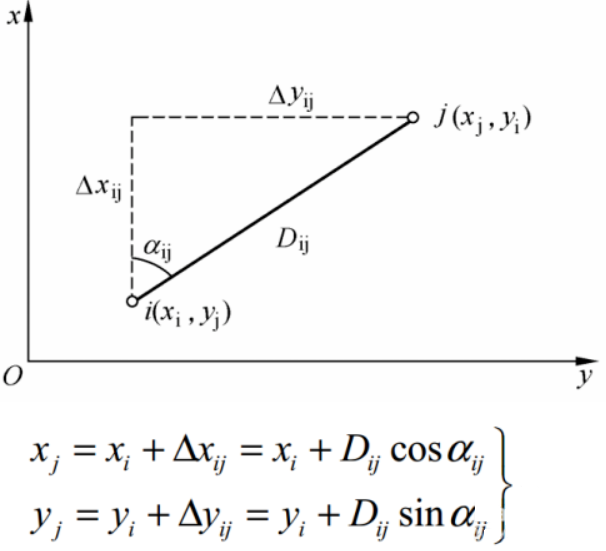
坐标正算:
已知两点间的坐标方位角和水平距离计算两点间的坐标增量(两点间的平面位置关系由极坐标化为直角坐标)。
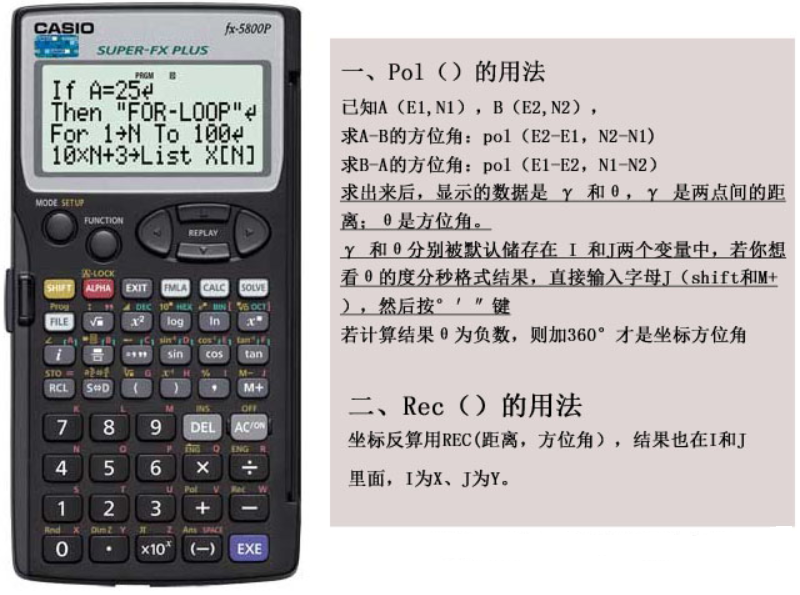
坐标反算:
已知两点间的坐标增量计算两点间的水平距离和坐标方位角(两点间的平面位置关系由直角坐标化为极坐标)。

arctan函数的值域( − π 2 , π 2 -\frac{\pi}{2},\frac{\pi}{2} −2π,2π)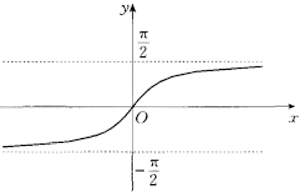
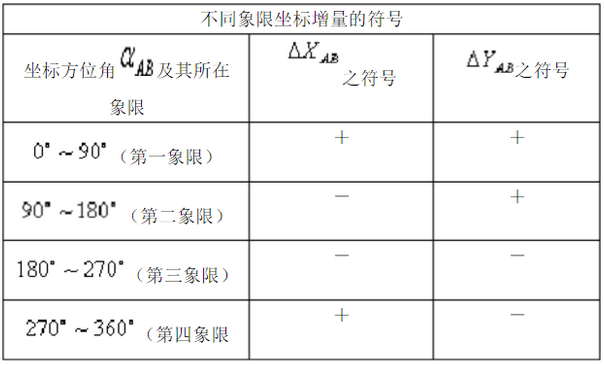
而坐标方位角 α \alpha α是(0°~360°),所以还需要根据坐标增量判断方位角的象限,按坐标方位角与象限角的换算关系计算坐标方位角。
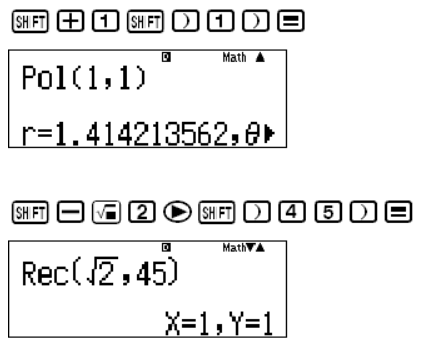
用计算器进行坐标正反算简单方法: