一、定义
- EtherCAT(以太网控制自动化技术)是最初由德国倍福(Beckhoff)公司开发的实时(real—time)工业以太网(Ethernet)技术,它是一种以以太网为基础的现场总线系统,其名称的CAT为控制自动化技术(Control Automation Technology)字首的缩写。
- EtherCAT于2003年4月推出,于2014年正式成为中国国家推荐标准,并已入编工信部的《国家智能制造标准体系建设指南》。
- EtherCAT的开发目的就是让以太网能够运用在工业自动化应用当中。
二、优势和特点
- EtherCAT 是最快的工业以太网技术,同时它提供纳秒级精确的同步;
- EtherCAT 在网络拓扑方面没有任何限制,几乎无限数量的节点可以组成线型、树型、星型拓扑及任何拓扑的组合;
- EtherCAT 物理介质可以选100Base-TX规范的5类UTP线缆,允许两个设备之间的最大电缆长度为100米,整个网络最多可以连接65535个设备;
- EtherCAT 节点地址可被自动设置,无需网络调试,集成的诊断信息可精 确定位错误;
- EtherCAT 并不是基于 TCP/IP 的,因此无需使用 MAC 地址或 IP 地址,更不需要 IT 专家配置交换机或路由器;
- EtherCAT 以相当甚至低于传统现场总线系统的价格水平提供工业以太网的特性。对于主站设备硬件仅需要一个以太网端口而无需昂贵的接口卡或协处理器。而不同形式的 EtherCAT 从站控制器可以从很多供应商获得。
三、传输机制
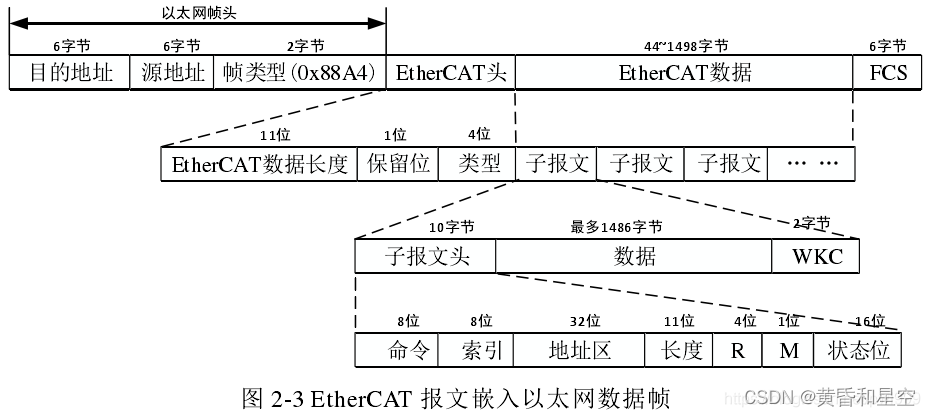
一般工业通讯的网络各节点传送的资料长度不长,多半都比以太网帧的最小长度要小。而每个节点每次更新资料都要送出一个帧,造成带宽的低利用率,网络的整体性能也随之下降。EtherCAT利用一种称为“飞速传输”(processing on the fly)的技术改善以上问题。
在数据帧向下游传输的过程中,每个节点读取寻址到该节点的数据,并将它的数据写入数据帧。这种传输方式提高了带宽利用率,使得每个周期通常用一个数据帧就足以实现整个系统的数据刷新,同时,网络无需使用交换机或集线器。
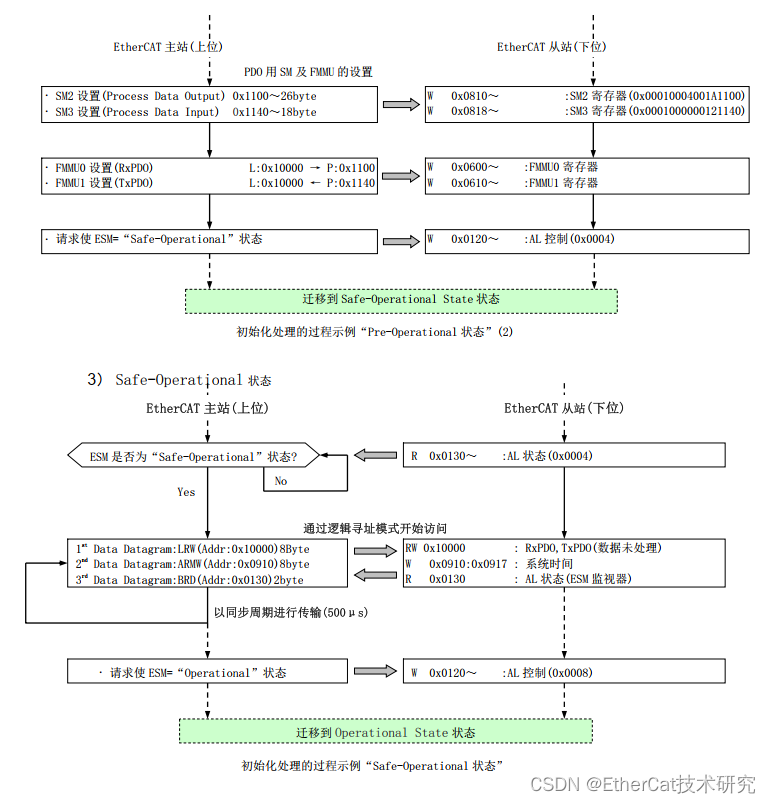
四、应用层
应用层AL(Application Layer)为用户与网络之间提供接口,应用层在EtherCAT 通信协议层次结构中是与用户联系最紧密最直接的一层,它可以直接与用户进行交互,实现面对具体的应用程序和控制任务等功能,EtherCAT应用层为各种服务协议与应用程序之间定义了接口,使其能够满足应用层所要求的各种协议共同工作的需求。EtherCAT 作为网络通信技术, 支持CANopen 协议中的CiA402,以及SERCOS 协议的应用层(即CoE 和SoE)等多种符合行规的设备和协议。
-
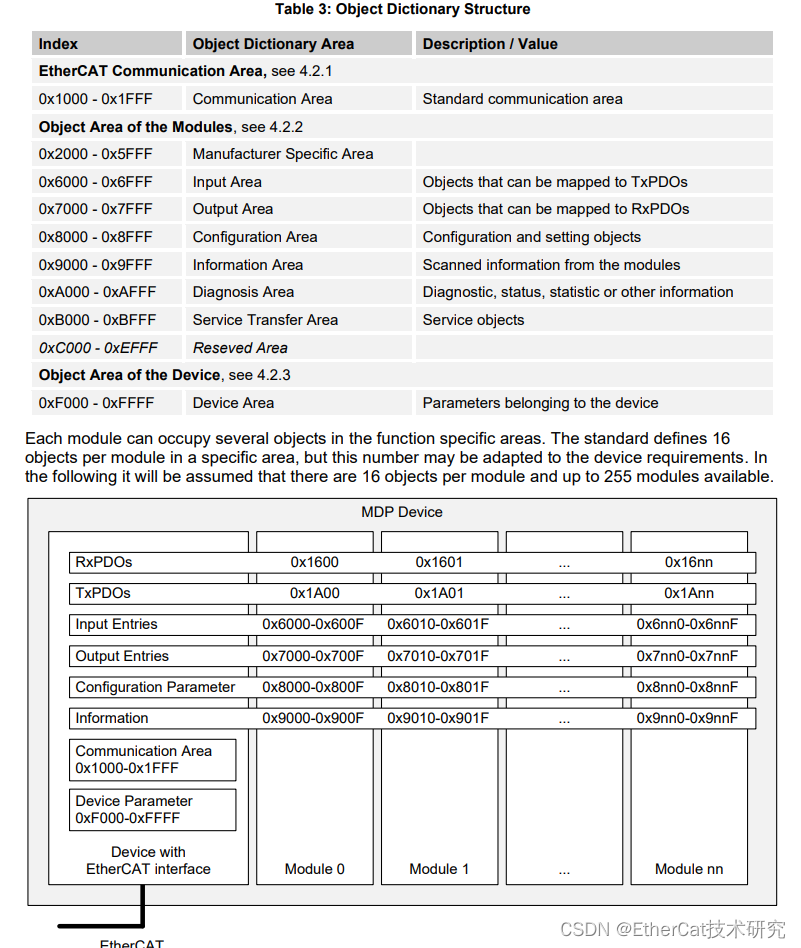
CoE (CANopen over EtherCAT)
CANopen©设备和应用行规广泛用于多种设备类别和应用,如I/O组件、驱动、编码器、比例阀、液压控制器,以及用于塑料或纺织行业的应用行规等。EtherCAT可以提供与CANopen机制相同的通讯机制,包括对象字典、PDO(过程数据对象)、SDO(服务数据对象),甚至于网络管理。因此,在已经安装了CANopen的设备中,仅需稍加变动即可轻松实现EtherCAT,绝大部分的CANopen©固件都得以重复利用。并且,可以选择性地扩展对象,以便利用EtherCAT所提供的巨大带宽。
-
SoE(SERCOS over EtherCAT)
SERCOS(串行实时通信协议)是一种高性能的数字伺服实时通信接口协议,包括了通信技术和多种设备行规。SoE 是基于EtherCAT 的SERCOS 协议,尽管EtherCAT 设备上不能进行SERCOS 协议的数据,但EtherCAT 能够对执行SERCOS 规范设备的伺服控制和数据通信提供支持。
-
EoE (EtherNet over EtherCAT)
EtherCAT技术不仅完全兼容以太网,而且在“设计”之初就具备良好的开放性特征——该协议可以在相同的物理层网络中包容其它基于以太网的服务和协议,通常可将其性能损失降到最小。对以太网的设备类型没有限制,设备可通过交换机端口在EtherCAT段内进行连接。
-
FoE (EtherCAT实现文件传输)
这种简单的协议与TFTP类似,允许存取设备中的任何数据结构。因此,无论设备是否支持TCP/IP,都有可能将标准化固件上载到设备上。
五、与Ethernet的区别
- Ethercat修改了数据链路层的结构;
- Ethercat具备实时性,而传统以太网非实时;
- Ethernet的框架是自由对等的通讯网络,但EtherCAT在Ethernet的基础上建立了Host & Slave模式;
- EtherCAT技术完全兼容以太网,可以在相同的物理层网络中包容其它基于以太网的服务和协议。
六、与CANOpen的区别
- EtherCAT完全兼容CanOpen协议;
- EtherCAT突破了Can总线中对SDO的包长的限制;
- EtherCAT一次传输可以遍历多个节点。
七、一些专业术语的含义总结
- IPC:Iindustry PC
- ETG:EtherCAT Technology Group
- ESC:EtherCAT Slave Controller
- MAC:Media Access Controller
【参考资料】
1.https://www.ethercat.org/en/technology.html
2.https://baike.baidu.com/item/EtherCAT/10779904?fr=aladdin
2.https://blog.csdn.net/weixin_39939972/article/details/80042786






![[工业互联-17]:常见EtherCAT主站与实现方法](https://img-blog.csdnimg.cn/img_convert/290bef9205e738ed7950c39603fc5b61.webp?x-oss-process=image/format,png)