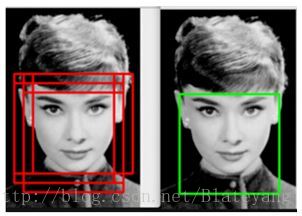
在目标检测中,常会利用非极大值抑制算法(NMS)对生成的大量候选框进行后处理,去除冗余的候选框,得到最具代表性的结果,以加快目标检测的效率。即如下图所示,消除多余的候选框,找到最佳的bbox。
NMS算法过程
根据候选框的类别分类概率做排序: A < B < C < D < E < F A<B<C<D<E<F A<B<C<D<E<F
- 先标记最大概率矩形框F是我们要保留下来的;
- 从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU(两框的交并比)是否大于某个设定的阈值,假设B、D与F的重叠度超过阈值,那么就扔掉B、D;
- 从剩下的矩形框A、C、E中,选择概率最大的E,标记为要保留下来的,然后判读E与A、C的重叠度,扔掉重叠度超过设定阈值的矩形框
就这样一直重复下去,直到剩下的矩形框没有了,标记完所有要保留下来的矩形框
NMS算法的python实现
# python3
import numpy as npdef py_nms(dets, thresh):"""Pure Python NMS baseline."""#x1、y1、x2、y2、以及score赋值x1 = dets[:, 0]y1 = dets[:, 1]x2 = dets[:, 2]y2 = dets[:, 3]scores = dets[:, 4]#每一个候选框的面积areas = (x2 - x1 + 1) * (y2 - y1 + 1)#order是按照score降序排序的order = scores.argsort()[::-1]keep = []while order.size > 0:i = order[0]keep.append(i)#计算当前概率最大矩形框与其他矩形框的相交框的坐标,会用到numpy的broadcast机制,得到的是向量xx1 = np.maximum(x1[i], x1[order[1:]])yy1 = np.maximum(y1[i], y1[order[1:]])xx2 = np.minimum(x2[i], x2[order[1:]])yy2 = np.minimum(y2[i], y2[order[1:]])#计算相交框的面积,注意矩形框不相交时w或h算出来会是负数,用0代替w = np.maximum(0.0, xx2 - xx1 + 1)h = np.maximum(0.0, yy2 - yy1 + 1)inter = w * h#计算重叠度IOU:重叠面积/(面积1+面积2-重叠面积)ovr = inter / (areas[i] + areas[order[1:]] - inter)#找到重叠度不高于阈值的矩形框索引inds = np.where(ovr <= thresh)[0]#将order序列更新,由于前面得到的矩形框索引要比矩形框在原order序列中的索引小1,所以要把这个1加回来order = order[inds + 1]return keep# test
if __name__ == "__main__":dets = np.array([[30, 20, 230, 200, 1], [50, 50, 260, 220, 0.9],[210, 30, 420, 5, 0.8],[430, 280, 460, 360, 0.7]])thresh = 0.35keep_dets = py_nms(dets, thresh)print(keep_dets)print(dets[keep_dets])测试结果:
只有第2个框与第1个框的IoU(0.38)超过了阈值,从结果看其被成功滤除掉了。NMS的大致原理和代码实现大致就是这样~

参考资料:
- 目标检测的几个名词
- faster rcnn 源码解读