Frenet坐标系在无人驾驶领域被普遍使用,特别是在城市、高速等道路交通环境下无人驾驶的路径规划系统中。Frenet坐标系使用参考线的切线向量和法线向量建立坐标系。相比笛卡尔坐标系,Frenet坐标系简化了路径规划问题。
参考论文:Moritz Werling经典的《Optimal trajectory generation for dynamic street scenarios in a Frenét Frame》
公式的推导主要有2种多种:
a.通过向量关系进行推导. 可以参考:Cartesian 坐标系与Frenet坐标系的转换
b. 通过运动学分析推导。 可以参考:知乎:信的札
本文主要是对b中公式推导的完善和补充



注意:下面公式中 (点 s) 和 s’在这里表示的是一个意思。 theda 和 后面的dlta theta 也是同一个意思。
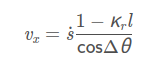
首先,求s:




由:

可得:

注意上式本是对dt求导,怎么会变成对ds求导了呢?
因为 d / dt = d / ds * ds /dt

因为:

且:

其实上式前面已经推导过了,这里的推导没有前面的直观。
所以:

同时,上式左右移项可得:


 补充对kx的求导过程:
补充对kx的求导过程:


参考文献:
- Apollo项目坐标系研究
- Frenet坐标系与Cartesian坐标系互转