文章目录
- 1、任务
- 1.1 任务简介
- 1.2 任务调度
- 1.3 任务的状态 (就绪态 / 运行态 / 阻塞态 / 挂起态)
- 1.4 空闲任务
- 2、动态创建两个任务
- 2.1 定义动态内存空间的堆
- 2.2 定义任务函数
- 2.3 定义 任务控制块 指针
- 2.4 动态创建任务 xTaskCreate()
- 2.5 启动任务 vTaskStartScheduler()
- 3、常用的任务函数
- 3.1 任务挂起 vTaskSuspend()
- 3.2 任务恢复 vTaskResume()
- 3.3 任务删除 vTaskDelete()
- 3.4 阻塞延时函数
- 3.4.1 相对延时函数 vTaskDelay()
- 3.4.2 绝对延时函数 vTaskDelayUntil()
1、任务
1.1 任务简介
(1) 在裸机系统中,系统的主体就是 main 函数里面顺序执行的无限循环,这个无限循环里面 CPU 按照顺序完成各种事情。
(2) 在FreeRTOS中,根据功能的不同,把整个系统分割成一个个独立且无限循环、无法返回的函数,这个函数就称为 任务。
1.2 任务调度
任何时刻,只有一个任务得到运行,FreeRTOS调度器 决定运行哪个任务。调度器会不断的启动、停止每一个任务,宏观看上去所有的任务都在同时在执行。
FreeRTOS 中的任务是 抢占式 调度机制,高优先级的任务可打断 低优先级任务,低优先级任务必须在高优先级任务阻塞或结束后 才能得到调度。
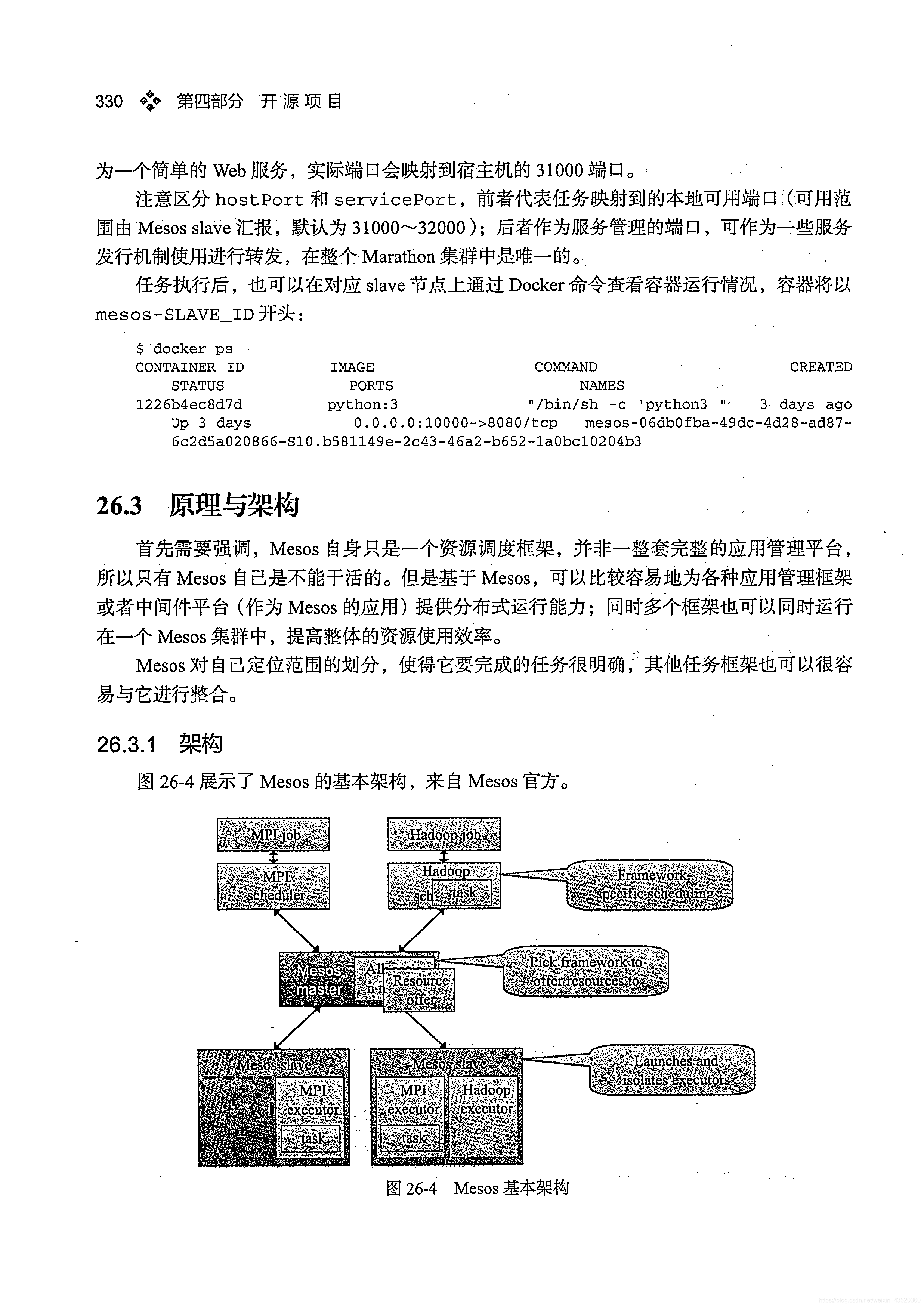
1.3 任务的状态 (就绪态 / 运行态 / 阻塞态 / 挂起态)
任务状态通常分为以下四种:
就绪态 (ready):该任务在就绪列表中,就绪的任务已经具备执行的能力,只等待调度器进行调度,新创建的任务会初始化为就绪态。
运行态 (running):该状态表明任务正在执行,此时它占用处理器,FreeRTOS调度器选择运行的永远是处于最高优先级的 就绪态任务,当任务被运行的一刻,它的任务状态就变成了运行态。
阻塞态 (blocked):正在运行的任务发生阻塞 (延时、读信号量等待、读写队列或者等待读写事件) 时,该任务会从就绪列表中删除,任务状态由运行态变成阻塞态。
挂起态 (suspended):处于挂起态的任务 对调度器而言是不可见的,让一个任务进入挂起状态的唯一办法就是调用 vTaskSuspend() 函数;而把一个挂起状态的任务恢复 的唯一途径 就是调用 vTaskResume() 或 vTaskResumeFromISR() 函数。
挂起态与阻塞态的区别:
当任务有较长的时间不允许运行的时候,我们可以挂起任务,这样 调度器就不会管这个任务的任何信息,直到我们调用恢复任务的 API 函数;
而任务处于阻塞态的时候,系统还需要判断 阻塞态的任务是否超时,是否可以解除阻塞。
他们之间的转换关系如下图:
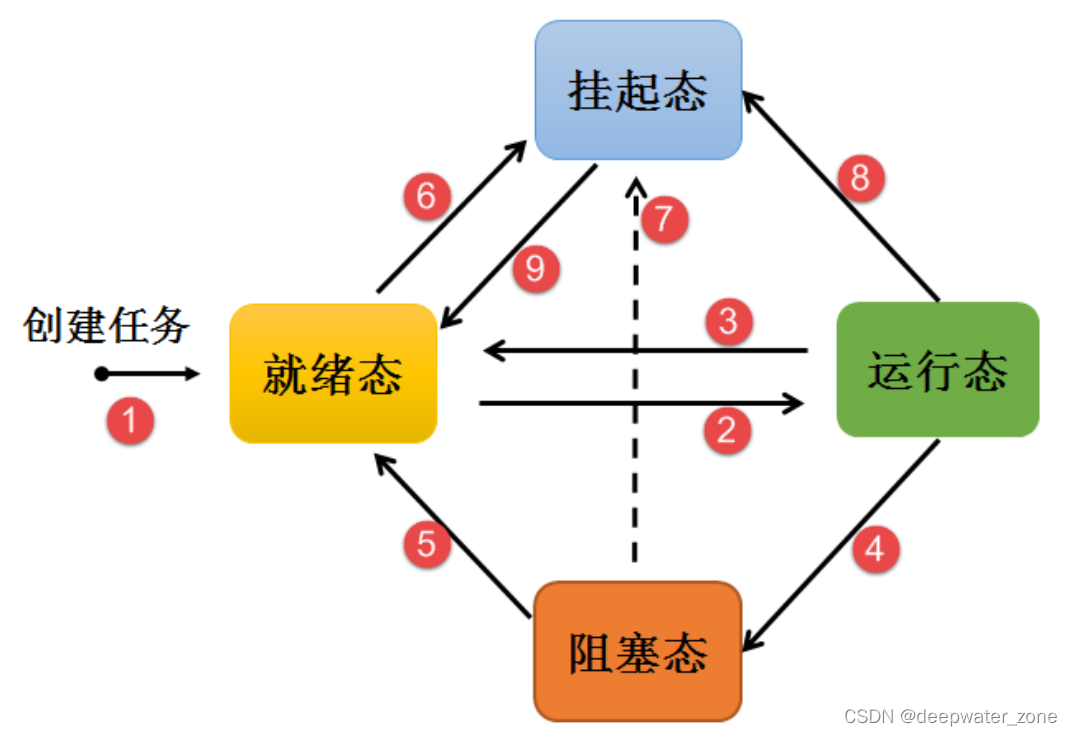
(1):创建任务→就绪态 (ready):任务创建完成后进入就绪态,表明任务已准备就绪,随时可以运行,只等待调度器进行调度。
(2):就绪态→运行态 (running):发生任务切换时,就绪列表中 最高优先级的任务被执行,从而进入运行态。
(3):运行态→就绪态:有更高优先级任务创建或者恢复后,会发生 任务调度,此刻就绪列表中最高优先级任务变为运行态,那么原先运行的任务由运行态变为就绪态,依然在就绪列表中,等待最高优先级的任务运行完毕继续运行原来的任务 (此处可以看做是 CPU使用权被更高优先级的任务抢占了)。
(4):运行态→阻塞态 (blocked):正在运行的任务发生阻塞 (延时、读信号量等待) 时,该任务会从就绪列表中删除,任务状态由运行态变成阻塞态,然后发生任务切换,运行就绪列表中当前最高优先级任务。
(5):阻塞态→就绪态:阻塞的任务被恢复后 (任务恢复、延时时间超时、读信号量超时或读到信号量等),此时被恢复的任务会被加入就绪列表,从而由阻塞态变成就绪态;如果此时被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,将该任务将再次转换任务状态,由就绪态变成运行态。
(6) (7) (8):就绪态、阻塞态、运行态→挂起态 (suspended):任务可以通过调用 vTaskSuspend() API 函数都可以将处于任何状态的任务挂起,被挂起的任务得不到CPU的使用权,也不会参与调度,除非它从挂起态中解除。
(9):挂起态→就绪态:把一个挂起状态的任务 恢复的唯一途径就是调用 vTaskResume() 或 vTaskResumeFromISR() API 函数,如果此时被恢复任务的优先级高于正在运行任务的优先级,则会发生 任务切换,将该任务将再次转换任务状态,由就绪态 变成 运行态。
1.4 空闲任务
空闲任务是系统在 启动调度器的时候,创建的优先级最低的任务,空闲任务主体主要是做一些系统内存的清理工作。如果没有其它任务可以运行,这个时候CPU就运行空闲任务。
2、动态创建两个任务
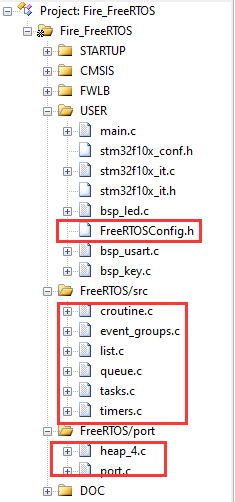
2.1 定义动态内存空间的堆
使用动态内存,即 堆(heap),也属于 SRAM。
FreeRTOS 做法是在SRAM里面定义一个大数组,也就是堆内存,供 FreeRTOS的动态内存分配函数使用,在第一次使用的时候,系统会将定义的堆内存进行初始化。
//系统所有总的堆大小
#define configTOTAL_HEAP_SIZE ((size_t)(36*1024)) (1)
static uint8_t ucHeap[ configTOTAL_HEAP_SIZE ]; (2)
(1) 堆内存的大小为 configTOTAL_HEAP_SIZE,在 FreeRTOSConfig.h 中,由用户自己定义,configSUPPORT_DYNAMIC_ALLOCATION 这个宏定义在使用FreeRTOS操作系统的时候必须开启。
(2) 从内部SRAM 里面定义一个静态数组 ucHeap,大小由configTOTAL_HEAP_SIZE这个宏决定,目前定义为 36KB。
2.2 定义任务函数
创建两个任务,分别 让 LED 灯以 500ms / 1000ms的频率闪烁,具体实现见代码清单:
static void LED1_Task(void* parameter){while (1) { LED1_ON;vTaskDelay(500); /* 延时500个tick */LED1_OFF;vTaskDelay(500); /* 延时500个tick */}}static void LED2_Task(void* parameter){while (1) { (1)LED2_ON;vTaskDelay(1000); /* 延时1000个tick */ (2)LED2_OFF;vTaskDelay(1000); /* 延时1000个tick */}
}
(1) :任务必须是一个死循环。
(2) :任务里面的延时函数必须使用 FreeRTOS 里面提供的延时函数 vTaskDelay()。
调用 vTaskDelay() 函数的时候,当前任务进入阻塞状态,调度器会切换到其它就绪的任务,从而实现多任务。
2.3 定义 任务控制块 指针
任务控制块 (TCB) 是在任务创建的时候分配内存空间创建,任务创建函数会返回一个指针,用于指向 任务控制块,所以要预先为任务栈定义一个任务控制块指针,也就是 任务句柄。
任务句柄的数据类型为 TaskHandle_t,在 task.h 中定义,实际上就是一个 空指针,具体实现见代码清单:
/* 任务句柄 */typedef void * TaskHandle_t;
定义任务句柄:
/**************************** 任务句柄 ********************************//** 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么* 这个句柄可以为 NULL。*/static TaskHandle_t AppTaskCreate_Handle = NULL; /* 创建任务句柄 */static TaskHandle_t LED1_Task_Handle = NULL; /* LED1 任务句柄 */static TaskHandle_t LED2_Task_Handle = NULL; /* LED2 任务句柄 */
2.4 动态创建任务 xTaskCreate()
使用动态内存的时候,使用 xTaskCreate() 函数来创建一个任务。
/* 创建 AppTaskCreate 任务 */xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */ (1)(const char* )"AppTaskCreate", /* 任务名字 */ (2)(uint16_t )512, /* 任务栈大小 */ (3)(void* )NULL, /* 任务入口函数参数 */ (4)(UBaseType_t )1, /* 任务的优先级 */ (5)(TaskHandle_t* )&AppTaskCreate_Handle); /* 任务控制块 指针 */ (6)/* 启动任务调度 */if (pdPASS == xReturn)vTaskStartScheduler(); /* 启动任务,开启调度 */
(1) :任务入口函数,即任务函数的名称。(用户自定义,用于创建任务)
(2) :任务名字,字符串形式, 最大长度由 FreeRTOSConfig .h 中定义的configMAX_TASK_NAME_LEN 宏指定,多余部分会被自动截掉,这里任务名字最好要与 任务函数入口名字一致,方便进行调试。
(3) :任务堆栈大小,单位为字,在32位的处理器下,一个字等于4个字节,那么任务大小就为 512*4 = 2048 字节。
(4) :任务入口函数形参,不用的时候配置为 0 或者 NULL即可。
(5) :任务的优先级。 优先级范围根据 FreeRTOSConfig .h 中的宏 configMAX_PRIORITIES 决定:
- 如果使能
configUSE_PORT_OPTIMISED_TASK_SELECTION这个宏定义,则最多支持 32 个优先级; - 如果不用特殊方法查找下一个运行的任务,那么则不强制要求限制最大可用优先级数目。
在 FreeRTOS 中,数值越大 优先级越高,0代表最低优先级。
(6) :任务控制块 指针。 在使用动态内存的时候,任务创建函数 xTaskCreate() 会返回一个指针 指向 任务控制块,该任务控制块是 xTaskCreate() 函数里面动态分配的一块内存。
任务创建好后,是处于 任务就绪 (ready),在就绪态的任务可以参与操作系统的调度。
说明:
为了方便管理,任务的创建都通过 AppTaskCreate() 任务创建函数来执行:
static void AppTaskCreate(void){BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为 pdPASS */taskENTER_CRITICAL(); //进入临界区/* 创建 LED1_Task 任务 */xReturn = xTaskCreate((TaskFunction_t )LED1_Task, /* 任务入口函数 */(const char* )"LED1_Task", /* 任务名字 */(uint16_t )512, /* 任务栈大小 */(void* )NULL, /* 任务入口函数参数 */(UBaseType_t )2, /* 任务的优先级 */(TaskHandle_t* )&LED1_Task_Handle); /* 任务控制块指针 */if (pdPASS == xReturn)printf("创建 LED1_Task 任务成功!\r\n");/* 创建 LED2_Task 任务 */xReturn = xTaskCreate((TaskFunction_t )LED2_Task, /* 任务入口函数 */(const char* )"LED2_Task", /* 任务名字 */(uint16_t )512, /* 任务栈大小 */(void* )NULL, /* 任务入口函数参数 */(UBaseType_t )3, /* 任务的优先级 */(TaskHandle_t* )&LED2_Task_Handle); /* 任务控制块指针 */if (pdPASS == xReturn)printf("创建 LED2_Task 任务成功!\r\n");vTaskDelete(AppTaskCreate_Handle); //删除 AppTaskCreate 任务taskEXIT_CRITICAL(); //退出临界区}
2.5 启动任务 vTaskStartScheduler()
在创建完任务的时候,我们需要 开启调度器,因为创建仅仅是把任务添加到系统中,还没真正调度,并且空闲任务也没实现,定时器任务也没实现,这些都是在开启调度函数 vTaskStartScheduler() 中实现的。
任务调度器只启动一次,之后就不会再次执行了。从此,任务管理都由 FreeRTOS 管理,此时是真正进入 实时操作系统。
/****************************************************************** @brief 主函数* @param 无* @retval 无* @note 第一步:开发板硬件初始化第二步:创建 APP 应用任务第三步:启动 FreeRTOS,开始多任务调度****************************************************************/int main(void){BaseType_t xReturn = pdPASS; /* 定义一个创建信息返回值,默认为 pdPASS *//* 第1步 开发板硬件初始化 */BSP_Init();/* 第2步 创建 AppTaskCreate 任务 */xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */ (1)(const char* )"AppTaskCreate", /* 任务名字 */ (2)(uint16_t )512, /* 任务栈大小 */ (3)(void* )NULL, /* 任务入口函数参数 */ (4)(UBaseType_t )1, /* 任务的优先级 */ (5)(TaskHandle_t* )&AppTaskCreate_Handle); /* 任务控制块指针 */ (6)/* 第3步 启动任务调度 */if (pdPASS == xReturn)vTaskStartScheduler(); /* 启动任务,开启调度 */elsereturn -1;while (1); /* 正常不会执行到这里 */}
3、常用的任务函数
3.1 任务挂起 vTaskSuspend()
任务可以通过调用 vTaskSuspend() 函数都可以将处于任何状态的任务挂起,被挂起的任务得不到 CPU 的使用权,也不会参与调度,它相对于调度器而言是不可见的,除非它从挂起态中解除。
注:任务可以调用 vTaskSuspend() 这个函数来挂起任务自身,但是在挂起自身的时候会进行一次任务上下文切换,需要 挂起自身就将 xTaskToSuspend 设置为 NULL 传递进来即可。
无论任务是什么状态都可以被挂起,只要调用了 vTaskSuspend() 这个函数就会挂起成功,不论是挂起其他任务还是挂起任务自身。
代码示例:
static TaskHandle_t LED_Task_Handle = NULL; /*LED任务句柄*/static void KEY_Task(void* parameter){while (1) {if ( Key_Scan(KEY1_GPIO_PORT, KEY1_GPIO_PIN) == KEY_ON ) {/*K1被按下*/printf("挂起 LED 任务!\n");vTaskSuspend(LED_Task_Handle); /*挂起LED任务*/}vTaskDelay(20); /*延时20个tick*/}}
3.2 任务恢复 vTaskResume()
任务恢复 就是让挂起的任务 重新进入就绪状态,恢复的任务会保留挂起前 的状态信息,在恢复的时候 根据挂起时的状态,继续运行。
如果被恢复任务在所有就绪态任务中,处于最高优先级列表的第一位,那么系统将进行任务上下文的切换。
代码示例:
static TaskHandle_t LED_Task_Handle = NULL; /* LED 任务句柄 */static void KEY_Task(void* parameter)
{while (1) {if ( Key_Scan(KEY2_GPIO_PORT,KEY2_GPIO_PIN) == KEY_ON ) {/* K2 被按下 */printf("恢复 LED 任务!\n");vTaskResume(LED_Task_Handle); /* 恢复LED任务!*/}vTaskDelay(20); /* 延时20个tick */}
}
3.3 任务删除 vTaskDelete()
vTaskDelete() 用于删除一个任务。
(1) 当一个任务 删除另外一个任务时,形参为 要删除任务 创建时返回的任务句柄;
(2) 如果是删除自身, 则形参为 NULL。
要想使用该函数必须在 FreeRTOSConfig.h 中把 INCLUDE_vTaskDelete 定义为 1,删除的任务将从所有 就绪,阻塞,挂起和事件列表中删除。
代码示例:
/* 删除任务本身 */
vTaskDelete( NULL );/* 在其他任务删除 DeleteTask 任务 */
vTaskDelete( DeleteHandle );
3.4 阻塞延时函数
3.4.1 相对延时函数 vTaskDelay()
阻塞延时的阻塞,是指任务调用该延时函数后,任务会被剥离 CPU 使用权,然后进入阻塞状态,直到延时结束,任务重新获取 CPU 使用权才可以继续运行。在任务阻塞的这段时间,CPU可以去执行其它的任务,如果其它的任务也在延时状态,那么 CPU就将运行空闲任务。延时的时长由形参 xTicksToDelay 决定,单位为系统节拍周期, 比如系统的时钟节拍周期为 1ms,那么调用 vTaskDelay(1) 的延时时间则为 1ms。
vTaskDelay() 延时是相对性的延时,它指定的延时时间是从调用 vTaskDelay() 结束后开始计算的,经过指定的时间后延时结束。
比如 vTaskDelay(100), 从调用 vTaskDelay() 结束后,任务进入阻塞状态,经过 100 个系统时钟节拍周期后,任务解除阻塞。因此,vTaskDelay() 并不适用与周期性执行任务的场合。此外,其它任务和中断活动,也会影响到 vTaskDelay() 的调用(比如调用前,高优先级任务抢占了当前任务),进而影响到任务的下一次执行的时间。
任务的延时在实际中运用特别多,因为需要暂停一个任务,让任务放弃 CPU,延时结束后再继续运行该任务,如果任务中没有阻塞的话,比该任务优先级低的任务 则无法得到CPU的使用权,就无法运行。
代码示例:
void vTaskA( void * pvParameters ){while (1) {// ...// 这里为任务主体代码// .../* 调用相对延时函数, 阻塞 1000 个 个 tick */vTaskDelay( 1000 );}}
3.4.2 绝对延时函数 vTaskDelayUntil()
在 FreeRTOS 中,除了相对延时函数,还有绝对延时函数 vTaskDelayUntil(),这个绝对延时常用于较精确的周期运行任务,比如我有一个任务,希望它以 固定频率定期执行,而不受外部的影响,任务从上一次运行开始到下一次运行开始的时间间隔是绝对的,而不是相对的。
函数原型:
void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement );
代码实例:
void vTaskA( void * pvParameters ){/* 用于保存上次时间。调用后系统自动更新 */static portTickType PreviousWakeTime;/* 设置延时时间,将时间转为节拍数 */const portTickType TimeIncrement = pdMS_TO_TICKS(1000);/* 获取当前系统时间 */PreviousWakeTime = xTaskGetTickCount();while (1) {/* 调用绝对延时函数, 任务时间间隔为 1000 个 个 tick */vTaskDelayUntil( &PreviousWakeTime ,TimeIncrement );// ...// 这里为任务主体代码// ...}
}
注意:在使用的时候要将延时时间转化为系统节拍,在任务主体之前要调用延时函数。
任务会先调用 vTaskDelayUntil() 使任务进入 阻塞态,等到时间到了就从阻塞中解除,然后执行主体代码,任务主体代码执行完毕。会继续调用 vTaskDelayUntil() 使任务进入阻塞态,然后就是循环这样子执行。
即使任务在执行过程中发生中断,那么也不会影响这个任务的运行周期,仅仅是缩短了阻塞的时间而已,到了要唤醒的时间依旧会将任务唤醒。