!!! 本文已同步到码云 - 点击此链接获取最新 - 可进入码云提交修改 !!!
附件
源码已放到码云 ! ! ! ( 请点击文首链接进入仓库 )
运行环境
Windows10STM32CubeMXVersion 5.2.0Keil5(MDK5)Version 5.28.0.0
简介
本例程主要讲解如何使用硬件IIC读写24C02
STM32CubeMx基本配置
基础配置过程请参考 STM32CubeMx开发之路—配置第一个项目
使用printf功能
重定向printf的过程请参考 STM32CubeMx开发之路—3发送USART数据和printf重定向
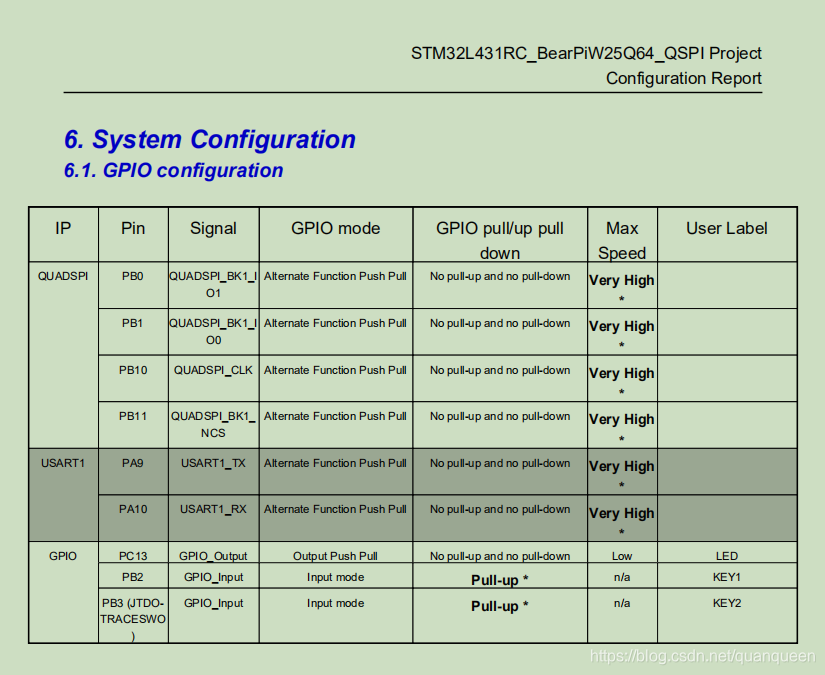
CubeMX配置


代码修改
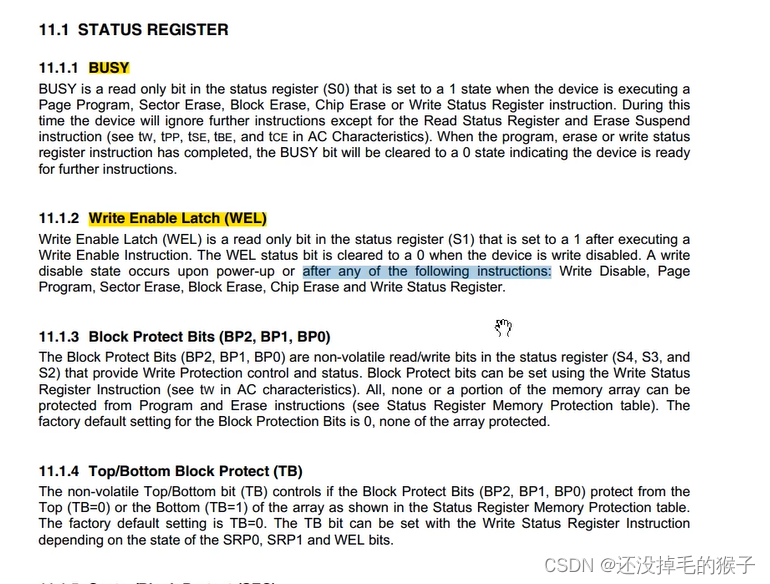
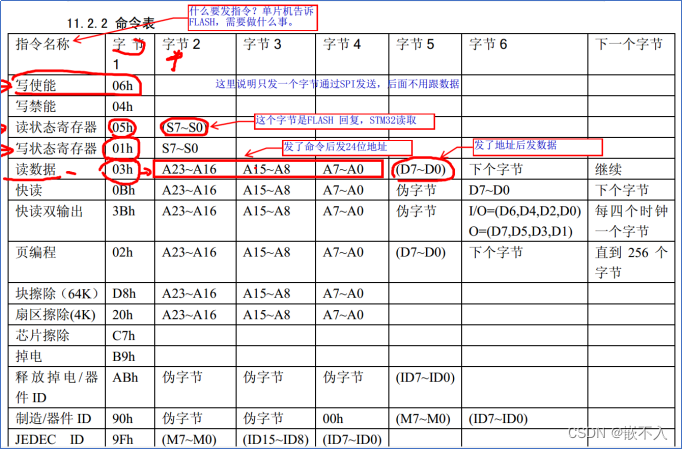
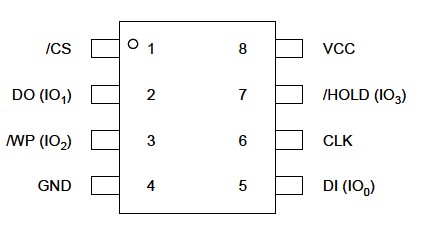
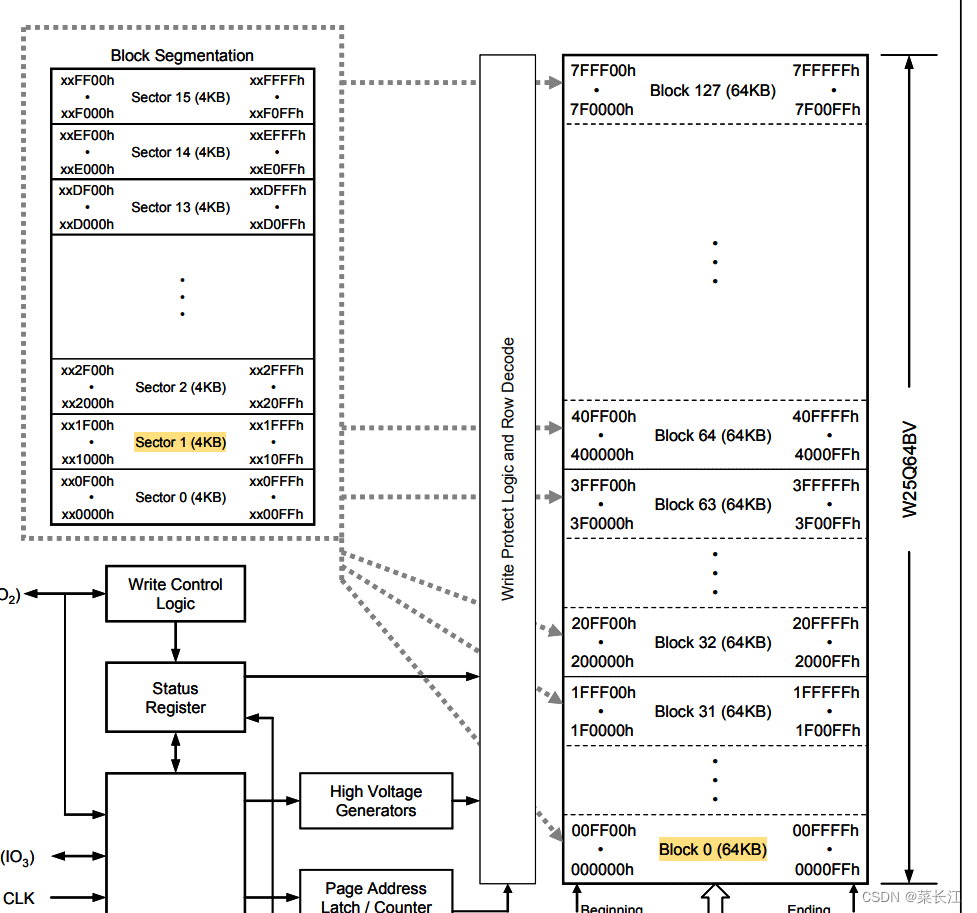
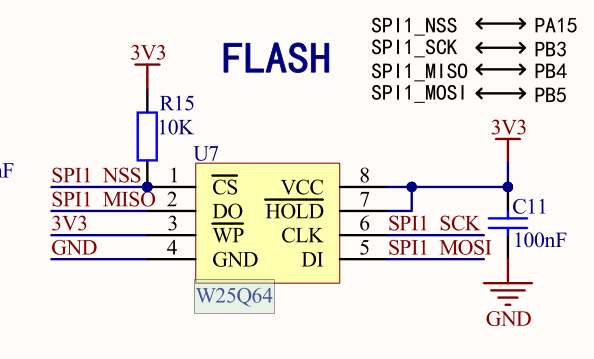
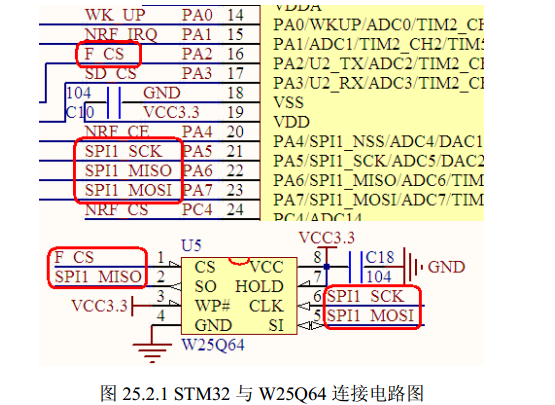
- 查看W25Q64的手册(后面配置时需要用的命令都在里面)

- 封装功能函数的代码(讲解写在代码里面)
/* W25Q64的指令 */
uint8_t w25x_read_id = 0x90; // 读ID
uint8_t m_addr[3] = {0,0,0}; // 测试地址0x000000
uint8_t check_addr = 0x05; // 检查线路是否繁忙
uint8_t enable_write = 0x06; // 使能了才能改变芯片数据
uint8_t erase_addr = 0x20; // 擦除命令
uint8_t write_addr = 0x02; // 写数据命令
uint8_t read_addr = 0x03; // 读数据命令/* 读ID */
void ReadID(void)
{uint8_t temp_ID[5] = {0,0,0,0,0}; // 接收缓存HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &w25x_read_id, 1, 100); // 读ID发送指令HAL_SPI_Receive(&hspi2, temp_ID, 5, 100); // 读取IDHAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS/* 测试打印 */printf("readID is %x%x\n",temp_ID[3],temp_ID[4]);
}/* 检查是否繁忙 */
void CheckBusy(void)
{uint8_t status=1;uint32_t timeCount=0;do{timeCount++;if(timeCount > 0xEFFFFFFF) //等待超时{return ;}HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &check_addr, 1, 100); // 发送指令HAL_SPI_Receive(&hspi2, &status, 1, 100); // 读取HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS}while((status&0x01)==0x01);
}/* 写入数据 */
void ReadData(void)
{uint8_t temp_wdata[5] = {0x99,0x88,0x77,0x66,0x55}; // 需要写入的数据/* 检查是否繁忙 */CheckBusy();/* 写使能 */HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &enable_write, 1, 100); // 发送指令HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS/* 擦除 */HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &erase_addr, 1, 100); // 发送指令HAL_SPI_Transmit(&hspi2, m_addr, 3, 100); // 发送地址HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS/* 再次检查是否繁忙 */CheckBusy();/* 写使能 */HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &enable_write, 1, 100); // 发送指令HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS/* 写数据 */HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &write_addr, 1, 100); // 发送指令HAL_SPI_Transmit(&hspi2, m_addr, 3, 100); // 地址HAL_SPI_Transmit(&hspi2, temp_wdata, 5, 100); // 写入数据HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS
}/* 读取数据 */
void WriteData(void)
{uint8_t temp_rdata[5] = {0,0,0,0,0}; // 读出数据保存的buff/* 检查是否繁忙 */CheckBusy();/* 开始读数据 */HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); // 使能CSHAL_SPI_Transmit(&hspi2, &read_addr, 1, 100); // 读发送指令HAL_SPI_Transmit(&hspi2, m_addr, 3, 100); // 地址HAL_SPI_Receive(&hspi2, temp_rdata, 5, 100); // 拿到数据HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); // 失能CS/* 测试打印 */printf("Read flash data is:%x %x %x %x %x\n",temp_rdata[0],temp_rdata[1],temp_rdata[2],temp_rdata[3],temp_rdata[4]);
}
- main函数
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_SPI2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */ReadID();WriteData();ReadData();while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}
运行结果
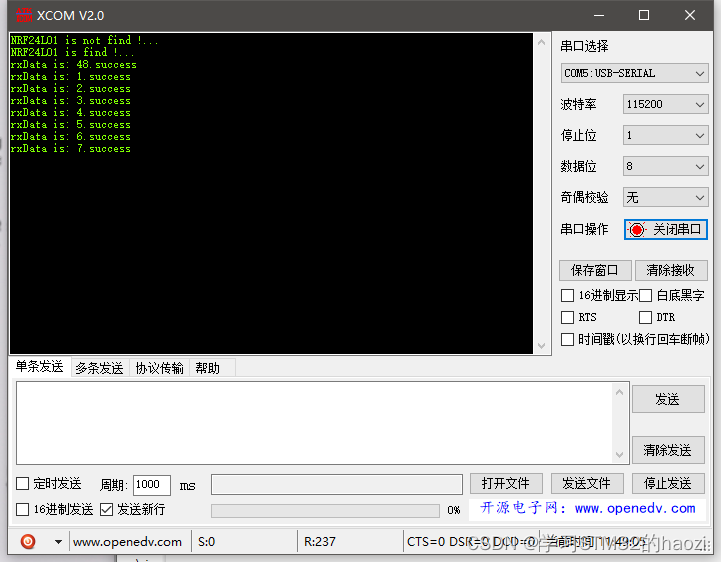
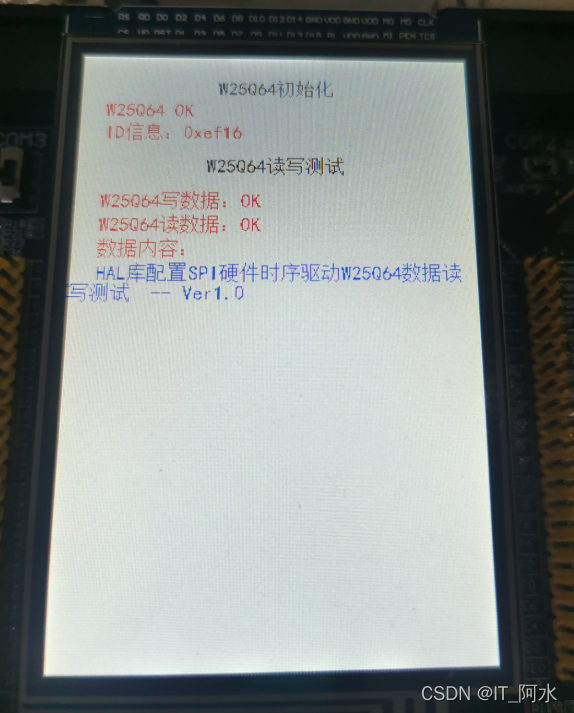
- 烧录进去,用串口调试助手
- 发现输出的就是我们存进的数据,说明测试成功

小结
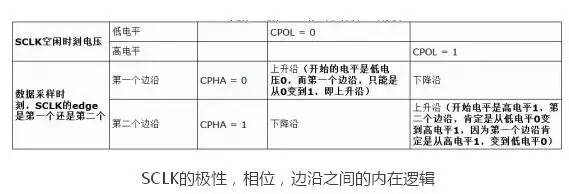
SPI在实际应用过程非常广泛,而且速度也是比较快的,也是嵌入式需了解的协议之一,所以一定要好好理解!
备注