UN R152是做什么的?
UN R152 全名为关于M1和N1型机动车高级紧急制动系统(AEBS)型式认证的统一规定,是联合国对于M1和N1型车辆AEBS系统认证的要求说明,当满足其要求内容时,才可通过联合国的认证,进入市场
一般要求
1.AEBS的有效性不应受到磁场或电场的不利影响
2.任何装有AEBS的车辆应要求配备防抱死制动功能
3.当AEBS出现故障,导致无法满足本法规要求时,发出故障警告
4.每次AEBS自检之间不应有明显的时间间隔,随后在电气检测故障的情况下,不应延迟发出警告信号
5.如果在10公里/小时以上的累计驾驶时间超过15秒后,系统尚未初始化,则应向驾驶员指示该状态的信息。在系统成功初始化之前,该信息应一直存在
6.在检测到任何非电气故障情况(如传感器失明或传感器错位)时,警告信号应点亮
7.如果车辆配备了停用AEBS的方法,则在系统停用时应发出停用警告
具体要求
车对车场景
碰撞警告
1.当即将在同一车道上与前面的M1类车辆发生碰撞,且相对速度高于主体车辆能够避免碰撞的速度时,应提供碰撞警告,并应在紧急制动开始前0.8秒触发
2.如果无法及时预测碰撞,从而在紧急制动前0.8秒发出碰撞警告,则应按照提供碰撞警告,并且应在紧急制动干预开始之前提供
3.如果碰撞的主要条件不再存在,则可以中止碰撞警告
紧急制动
1.当系统检测到即将发生碰撞的可能性时,车辆的行车制动系统应具有至少5.0 m/s2的制动需求
2.如果发生碰撞的条件不再存在,紧急制动可能会中止
速度范围
1.系统应至少在10 km/h和60 km/h之间的车速范围内以及在所有车辆负载条件下处于活动状态,除非停用
制动减速需求
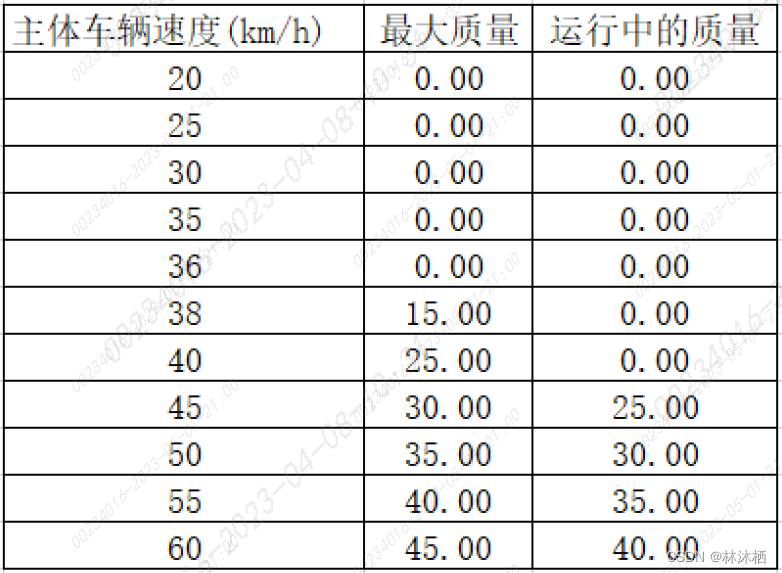
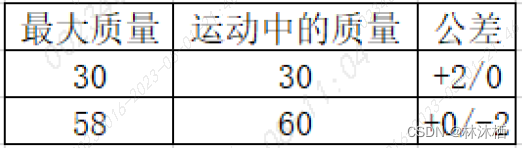
如果没有驾驶员输入会导致中断,则AEBS应能够实现一个相对碰撞速度,此速度小于或等于下表所示最大相对碰撞速度
(a)用于与无障碍且不断移动或静止的目标碰撞;
(b)在平坦、水平和干燥的道路上;
(c)最大质量和在运行中质量;
(d)在车辆纵向中心平面位移不超过0.2m的情况下;
(e)在至少1000勒克斯的环境光照条件下,不遮挡传感器(例如,直接遮挡阳光);
(f)在没有影响车辆动态性能的天气条件的情况下(例如,没有暴风雨,不低于0℃);
(g)在没有弯道的情况下直线行驶,并且没有在十字路口转弯时
——M1车辆的最大相对碰撞速度(km/h)*
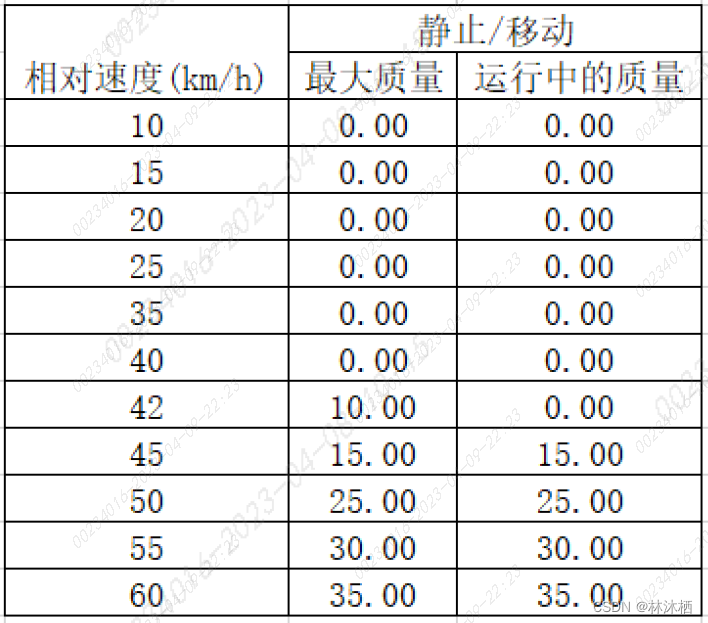
对于所列值之间的相对速度(例如53 km/h),分配给下一个较高相对速度(即55 km/h)的最大相对碰撞速度(即30/30 km/h)
对于运行中质量以上的质量,应适用分配给最大质量的最大相对碰撞速度
——N1车辆的最大相对碰撞速度(km/h)*
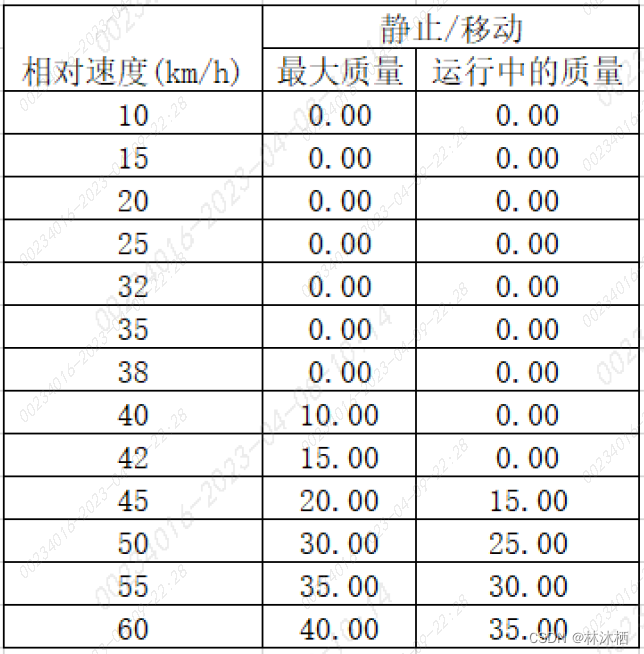
对于所列值之间的相对速度(例如53 km/h),分配给下一个较高相对速度(即55 km/h)的最大相对碰撞速度(即35/30 km/h)
对于运行中质量以上的质量,应适用分配给最大质量的最大相对碰撞速度
使用:a=Wr/W * L/H,其中
(a)Wr是后桥负载。
(b)W是运行中的主体车辆质量
(c)L是主体车辆的轴距
(d)H是运行中的主体车辆重心高度
根据制造商的要求,N1类车辆可根据a>1.3的要求进行评估,无论其a值如何
车对行人场景
碰撞警告
1.当AEBS检测到与以5 km/h的恒定速度横穿道路的行人发生碰撞的可能性时,应提供碰撞警告,并且应在紧急制动干预开始之前提供
2.如果碰撞的主要条件不再存在,则可以中止碰撞警告
紧急制动
1.当系统检测到即将发生碰撞的可能性时,车辆的行车制动系统应具有至少5.0 m/s2的制动需求
2.如果碰撞的主要条件不再存在,则可能会中止紧急制动
速度范围
1.系统应至少在20 km/h至60 km/h的车速范围内以及所有车辆负载条件下处于活动状态,除非停用
制动减速需求
如果没有驾驶员输入会导致中断,则AEBS应能够实现一个相对碰撞速度,此速度小于或等于下表所示最大相对碰撞速度
(a)横向速度分量不超过5km/h的无障碍垂直交叉行人;
(b)在明确的情况下(例如,不是多个行人);
(c)在平坦、水平和干燥的道路上;
(d)最大质量和运行中的质量;
(e)在预期碰撞点与车辆纵向中心平面相比位移不超过0.2m的情况下;
(f)在至少2000勒克斯的环境照明条件下,传感器没有直接致盲(例如,直接致盲的阳光)。
(g)在没有影响车辆动态性能的天气条件的情况下(例如,没有暴风雨,不低于0°C),以及
(h)在没有弯道的情况下直线行驶,并且不在十字路口转弯时
——M1车辆的最大碰撞速度(km/h)*
对于所列值之间的相对速度(例如53 km/h),应适用分配给下一个较高相对速度(即55 km/h)的最大碰撞速度(即30/30 km/h)。
对于运行中质量以上的质量,应适用分配给最大质量的最大相对碰撞速度
——N1车辆的最大碰撞速度(km/h)*
对于所列值之间的相对速度(例如53 km/h),应适用分配给下一个较高相对速度(即55 km/h)的最大碰撞速度(即35/30 km/h)。
对于运行中质量以上的质量,应适用分配给最大质量的最大相对碰撞速度
使用:a=Wr/W * L/H,其中
(a)Wr是后桥负载。
(b)W是运行中的主体车辆质量
(c)L是主体车辆的轴距
(d)H是运行中的主体车辆重心高度
根据制造商的要求,N1类车辆可根据a>1.3的要求进行评估,无论其a值如何
车对骑行车场景
碰撞警告
1.当AEBS检测到与以15km/h的恒定速度横穿道路的自行车发生碰撞的可能性时,应提供碰撞警告,并且应在紧急制动干预开始之前提供。
2.如果碰撞的主要条件不再存在,则可以中止碰撞警告。
紧急制动
1.当系统检测到即将发生碰撞的可能性时,车辆的行车制动系统应具有至少5.0 m/s2的制动需求
2.如果碰撞的主要条件不再存在,则可能会中止紧急制动
速度范围
1.系统应至少在20 km/h至60 km/h的车速范围内以及所有车辆负载条件下处于活动状态,除非停用
制动减速需求
如果没有驾驶员输入会导致中断,则AEBS应能够实现一个相对碰撞速度,此速度小于或等于下表所示最大相对碰撞速度
(a)有无障碍的横穿骑行者,恒定速度为10-15km/h;
(b)在明确的情况下(例如,不是多个骑行者);
(c)在平坦、水平和干燥的道路上;
(d)最大质量和运行中的质量;
(e)在自行车曲轴的预期碰撞点与车辆纵向中心平面相比位移不超过0.2m的情况下;
(f)在至少2000勒克斯的环境照明条件下,传感器没有直接致盲(例如,直接致盲的阳光)。
(g)在没有影响车辆动态性能的天气条件的情况下(例如,没有暴风雨,不低于0°C),以及
(h)在没有弯道的情况下直线行驶,并且不在十字路口转弯时
——M1车辆的最大碰撞速度(km/h)*
对于所列值之间的相对速度(例如53 km/h),应适用分配给下一个较高相对速度(即55 km/h)的最大碰撞速度(即35/35 km/h)。
对于运行中质量以上的质量,应适用分配给最大质量的最大相对碰撞速度
——N1车辆的最大碰撞速度(km/h)*
对于所列值之间的相对速度(例如53 km/h),应适用分配给下一个较高相对速度(即55 km/h)的最大碰撞速度(即40/35 km/h)。
对于运行中质量以上的质量,应适用分配给最大质量的最大相对碰撞速度
驾驶员中断
1.AEBS应为驾驶员提供中断碰撞警告和紧急制动的方法
2.在上述两种情况下,这种中断可以由任何激活的动作(例如,强制降档。操作方向指示灯控制)来启动,这表明驾驶员意识到了紧急情况。车辆制造商应在型式认证时向技术服务部门提供这些激活动作的清单,并将其作为试验报告的附件
停用
当车辆配备有手动停用AEBS功能的装置时,以下条件应酌情适用:
1.AEBS功能应在每个新点火循环开始时自动恢复
2.EBS控制装置的设计应确保在少于两次的故意操作下不可能手动停用
3.AEBS控制装置的安装应符合联合国第121号法规01系列修正本或任何后续系列修正本的相关要求和过渡规定
4.在10 km/h以上的速度下,不可能手动停用AEBS
当车辆配备有自动停用AEBS功能的装置时,例如在越野使用、被牵引、在测功机上操作、在洗涤设备中操作等情况下,以下条件应酌情适用:
1.车辆制造商应在型式认证时向技术服务部门提供AEBS功能自动停用的情况和相应标准列表,并将其附在试验报告中
2.一旦导致自动停用的条件不再存在,AEBS功能应立即自动重新激活
3.如果AEBS功能的自动停用是由于驾驶员手动关闭车辆的ESC功能造成的,则AEBS的这种停用至少需要驾驶员采取两次深思熟虑的行动
4.恒定的光学警告信号应通知驾驶员AEBS功能已停用
5.当自动驾驶功能处于车辆的纵向控制中时(例如,ALKS处于激活状态),只要确保车辆在手动操作过程中至少提供与AEBS功能相同的防撞能力,AEBS功能就可以暂停或调整其控制策略(即制动需求、警告时间),而无需向驾驶员发出指示
警告指示
1.碰撞警告应通过从声学、触觉或光学中选择的至少两种模式提供
2.车辆制造商应在型式认证时提供警告指示的说明以及向驾驶员提供碰撞警告信号的顺序,并将其记录在试验报告中
3.如果使用光学手段作为碰撞警告的一部分。光学信号可以是故障警告信号的闪烁
4.故障警告应为恒定的黄色光学警告信号
5.当点火开关处于“ON”或“Start”或两者之间位置时,每个AEBS光学警告信号都应激活,该位置由制造商指定为检查位置
6.即使在白天,光学警告信号也应可见;驾驶员必须在驾驶座上很容易验证信号的满意状态
7.当向驾驶员提供光学警告信号以指示AEBS暂时不可用时,例如由于恶劣天气条件,信号应保持恒定。故障警告信号可以用于此目的。
定期技术检查的规定
1.在定期技术检查中,应能够通过对故障警告信号状态的可见观察来确认AEBS的正确操作状态。
2.在故障警告信号处于公共空间的情况下。在进行故障警告信号状态检查之前,必须观察公共空间的功能
3.在进行型式认证时,应秘密概述保护防止制造商选择的故障警告信号被未经授权的简单操作修改的方法;或者,当检查AEBS的正确操作状态的辅助手段可用时,满足该保护要求
测试方法
静止车辆目标的警告和激活测试
1.在试验的功能期间,主体车辆应直线接近静止目标至少两秒,且主体车辆与目标中心线的偏移量不超过0.2m
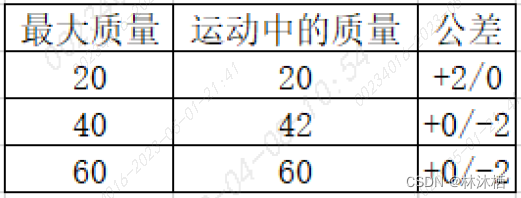
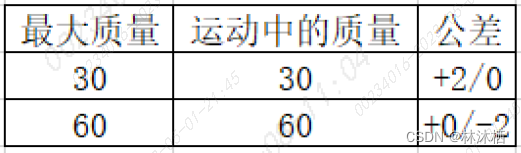
2.试验应在车辆以下表所示速度行驶的情况下进行,分别用于M1和N1类
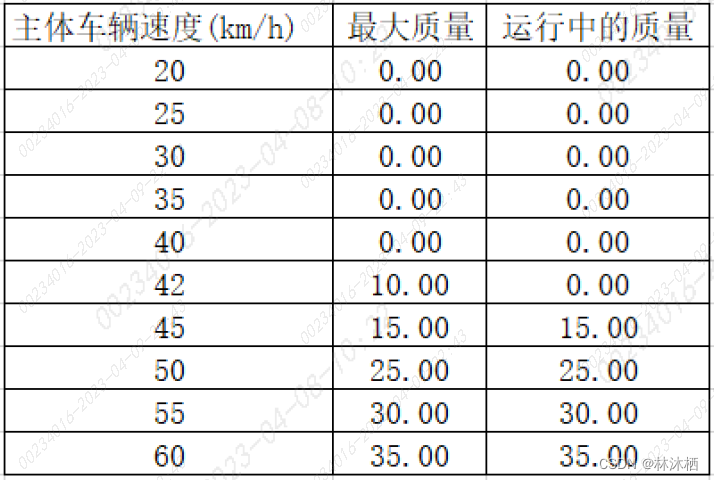
——静止场景下M1类主体车辆试验速度
——静止场景下N1类主体车辆试验速度
3.当主体车辆以恒定速度行驶,并且距离目标至少4秒的碰撞时间(TTC)时,应开始测试功能
4.从功能开始到碰撞点,除了轻微调整转向控制以抵消任何漂移外,驾驶员不得对主体车辆的任何控制进行任何调整。
移动车辆目标的警告和激活测试
1.在试验的功能期间,主体车辆应直线接近静止目标至少两秒,且主体车辆与目标中心线的偏移量不超过0.2m
2.试验应使车辆分别以下表中所示的M1和N1类速度行驶,目标车辆以20km/h的速度行驶
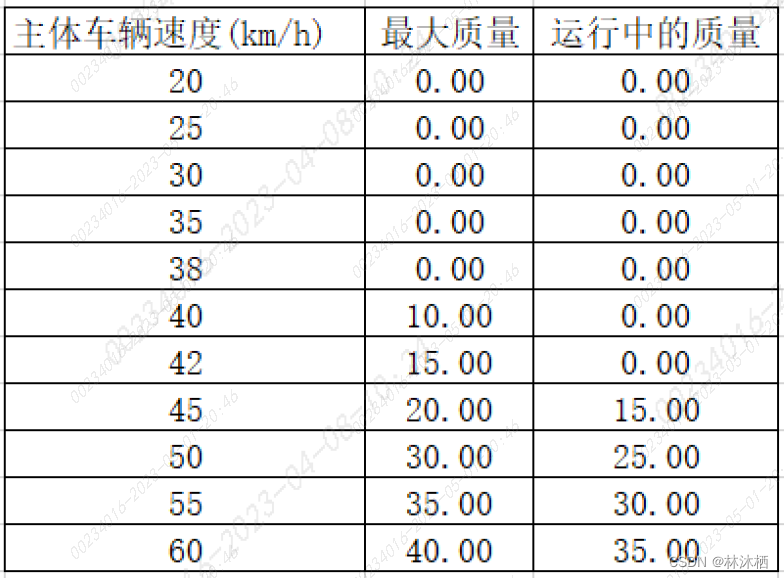
——移动目标场景下M1类主体车辆试验速度
——移动目标场景下N1类主体车辆试验速度
3.当主体车辆以恒定速度行驶,并且距离目标至少4秒的碰撞时间(TTC)时,应开始测试功能
4.从功能开始到碰撞点,除了轻微调整转向控制以抵消任何漂移外,驾驶员不得对主体车辆的任何控制进行任何调整。
骑行者目标的警告和激活测试
1.在试验的功能之前,主体车辆应与自行车目标直线接近碰撞点至少两秒,主体车辆与自行车的预期碰撞点中心线偏移不超过0.1 m
2.当主体车辆以恒定速度行驶,并且距离碰撞点至少4秒的TTC距离时,应开始的功能试验
3.自行车目标应以15 km/h+0/-1 km/h的恒定速度沿垂直于主体车辆行驶方向的直线行驶,不得在试验功能开始之前开始。在测试功能之前的自行车加速阶段,应遮挡自行车目标。自行车目标的定位应与主体车辆协调,使自行车目标在主体车辆前部的撞击点位于主体车辆的纵向中心线上,公差不超过0.1 m,主体车辆是否在整个测试功能保持在规定的测试速度并且没有制动。
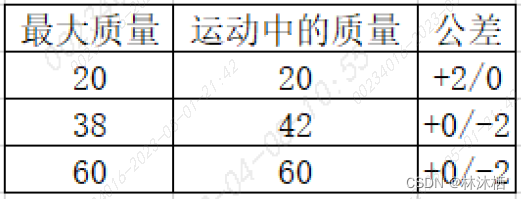
4.试验应在车辆以下表所示速度行驶的情况下进行,分别针对M1和N1类
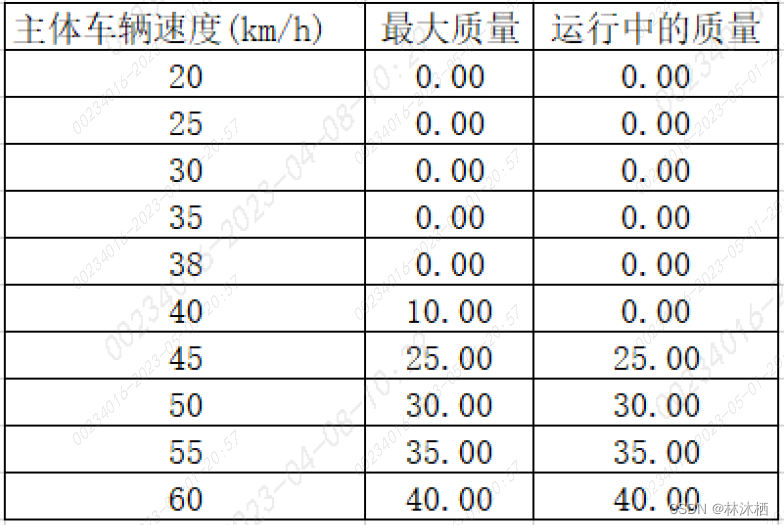
——骑行者目标场景下M1类主体车辆试验速度

——骑行者目标场景下N1类主体车辆试验速度

5.从功能测试开始,除非主体车辆避免碰撞或主体车辆通过与自行车目标的碰撞点,否则驾驶员不得对主体车辆的任何控制进行调整,除了对转向控制进行轻微调整以抵消任何漂移
故障检测试验
1.模拟电气故障,例如,断开任何AEBS组件的电源或断开AEBS组件之间的任何电气连接。当模拟AEBS故障时,警告信号的电气连接和可选手动AEBS停用控制不应断开
2.故障警告信号应在车辆以大于10 km/h的速度行驶后10 s内激活并保持激活,并在车辆静止的情况下,点火开关从“OFF”到"ON",只要存在模拟故障,故障警告信号需立即重新激活
停用测试
1.对于配备手动停用AEBS装置的车辆,将点火开关置为"ON"位置并停用AEBS,警告信号应激活。将点火开关置为“OFF”位置,再次将点火开关置为“ON”位置,并验证先前激活的警告信号是否未重新激活,从而表明AEBS已恢复。如果点火系统通过“钥匙”启动,则应在不拔下钥匙的情况下满足上述要求
误报场景
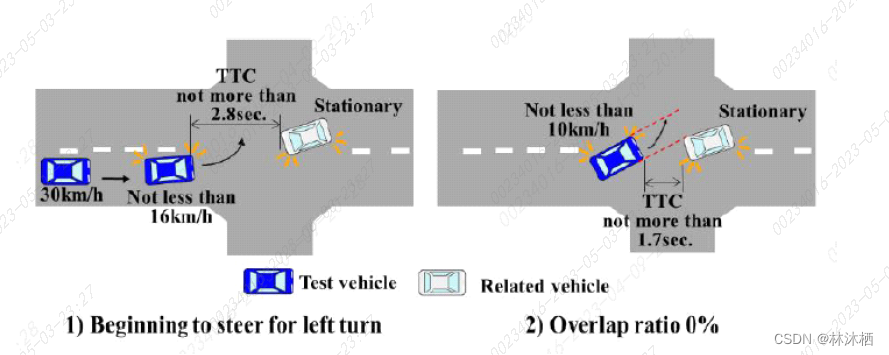
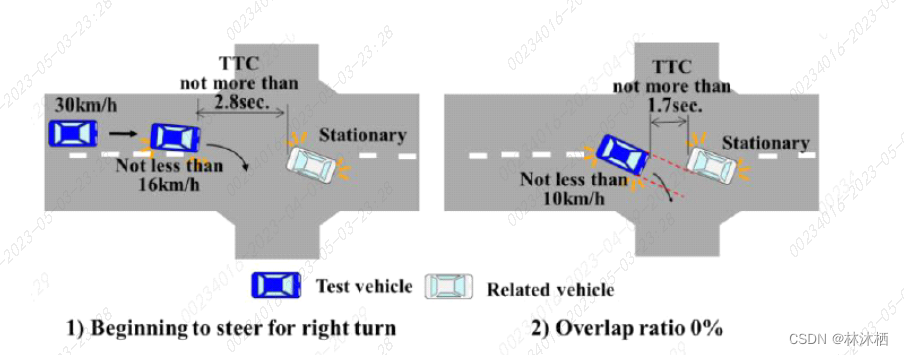
场景一:十字路口左转或右转
描述:前方是一辆迎面而来的车辆停止准备在十字路口左转或右转,自车要在此场景下通过前车并完成左转或右转的任务
详细场景示例:
主体车辆以30 km/h的速度(公差为+0/-2 km/h)向十字路口行驶,并在主体车辆开始左/右转向时通过制动减速至不低于16 km/h的速度,并且与迎面而来的车辆的碰撞时间(TTC)不超过2.8秒。当主体车辆在十字路口左转或右转时,速度降至不低于10km/h,然后以恒定速度行驶。当目标车辆和迎面而来的车辆之间的重叠率变为0%时,对迎面而来车辆的TTC不超过1.7秒
在道路右侧行驶
在道路左侧行驶
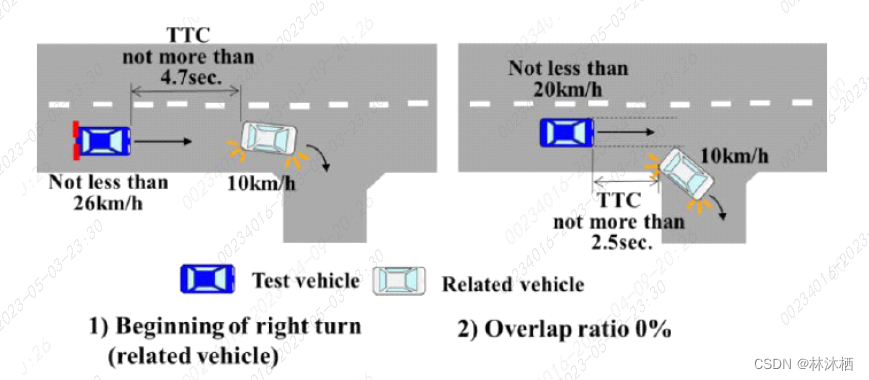
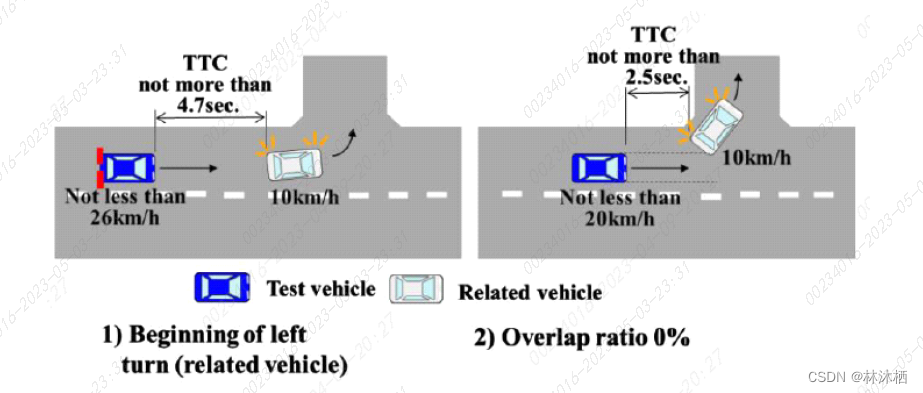
场景二:前方车辆右转或左转
描述:主体车辆跟随前方车辆行驶,之后,前方车辆在拐角处向右或向左转弯,目标车辆直线行驶。
详细场景示例:
前方车辆和主体车辆在直线道路上均以40 km/h的速度行驶(公差为+0/-2 km/h)。前方车辆通过制动减速至10km/h的速度(公差为+0/-2km/h),以便在拐角处右转或左转,而主体车辆也通过制动减速,以与前方车辆保持适当的距离。当前方车辆开始右转或左转时,主体车辆的速度不低于26 km/h,且至前方车辆的TTC不超过4.7秒。之后,主体车辆减速至不小于20km/h的速度,然后以恒定速度行驶。当目标车辆和前方车辆之间的重叠率变为0%时,至前方车辆的TTC不超过2.5秒
在道路右侧行驶
在道路左侧行驶
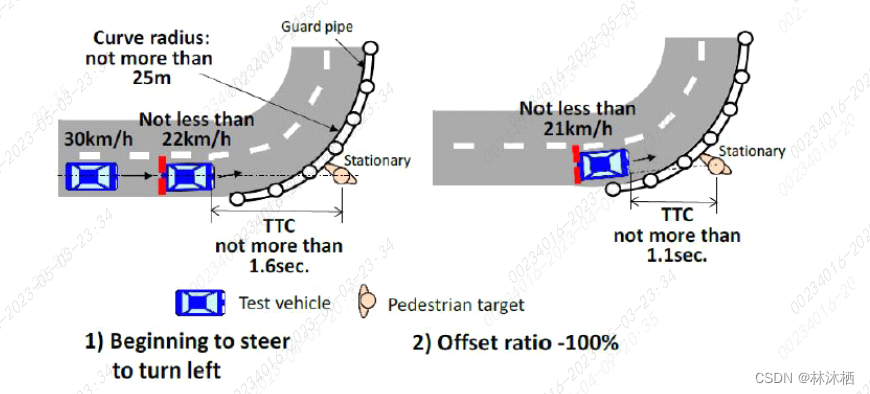
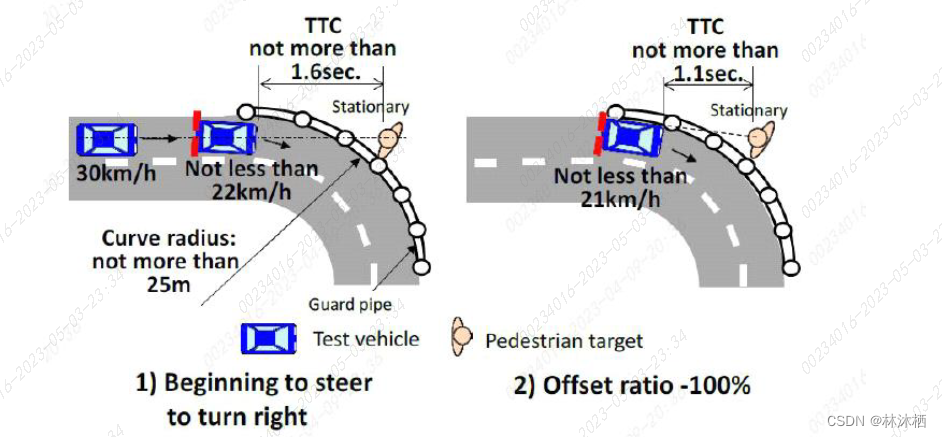
场景三:有护栏和固定物体的弯曲道路
描述:主体车辆行驶一条小半径弯曲道路,该道路的外侧建造有防护管,并且一辆静止车辆(M1类)、一个静止行人目标或一个静止自行车目标正好位于防护管的外侧,并且位于车道中心的延长线上。
详细场景示例:
主体车辆以30km/h(公差为+0/-2km/h)的速度向道路外侧半径不超过25米的弯道行驶,并在主体车辆进入弯道处通过制动减速至不低于22km/h的速度。当目标车辆开始在弯道中转弯时,到静止物体的TTC不超过1.6秒。在弯道中,主体车辆行驶在比道路中心更靠外侧的车道上。之后,主体车辆继续以不低于21km/h的恒定速度在弯道中转弯。当目标车辆和静止车辆之间的重叠率变为0%时,或当主体车辆与静止行人目标或静止自行车目标中心之间的偏移率变为-100%时,静止物体的TTC不超过1.1秒
在道路右侧行驶
在道路左侧行驶
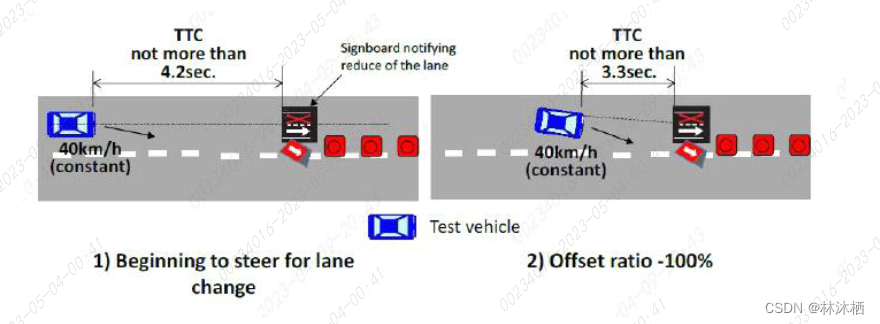
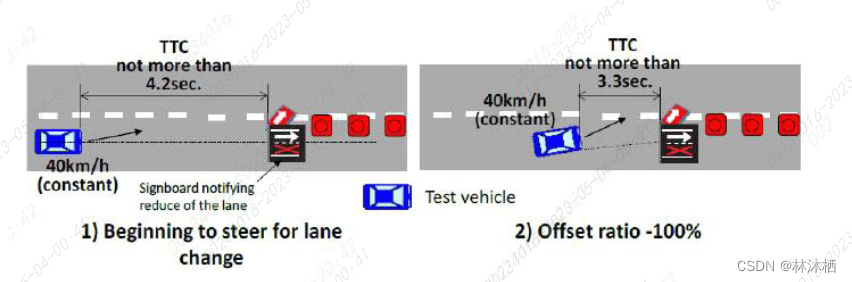
场景四:道路施工导致的车道变换
描述:主体车辆在位于车道中心的标志牌前改变车道,并通知驾驶员车道减少。
详细场景示例:
主体车辆以40km/h的速度(公差为+0/-2km/h)在直道上行驶,并开始转向,以便在通知减少车道的标志牌前改变车道。没有其他车辆靠近主体车辆。当主体车辆开始转向时,到达标志牌的TTC不超过4.2秒。在变道过程中,主体车辆的速度是恒定的,当主体车辆与标志牌中心之间的偏移率变为-100%时,到标志牌的TTC不超过3.3秒
在道路右侧行驶
在道路左侧行驶