一、ElasticSearch基础:
1、什么是Elasticsearch:
Elasticsearch 是基于 Lucene 的 Restful 的分布式实时全文搜索引擎,每个字段都被索引并可被搜索,可以快速存储、搜索、分析海量的数据。
全文检索是指对每一个词建立一个索引,指明该词在文章中出现的次数和位置。当查询时,根据事先建立的索引进行查找,并将查找的结果反馈给用户的检索方式。这个过程类似于通过字典中的检索字表查字的过程。
2、Elasticsearch 的基本概念:
(1)index 索引:索引类似于mysql 中的数据库,Elasticesearch 中的索引是存在数据的地方,包含了一堆有相似结构的文档数据。
(2)type 类型:类型是用来定义数据结构,可以认为是 mysql 中的一张表,type 是 index 中的一个逻辑数据分类
(3)document 文档:类似于 MySQL 中的一行,不同之处在于 ES 中的每个文档可以有不同的字段,但是对于通用字段应该具有相同的数据类型,文档是es中的最小数据单元,可以认为一个文档就是一条记录。
(4)Field 字段:Field是Elasticsearch的最小单位,一个document里面有多个field
(5)shard 分片:单台机器无法存储大量数据,es可以将一个索引中的数据切分为多个shard,分布在多台服务器上存储。有了shard就可以横向扩展,存储更多数据,让搜索和分析等操作分布到多台服务器上去执行,提升吞吐量和性能。
(6)replica 副本:任何服务器随时可能故障或宕机,此时 shard 可能会丢失,通过创建 replica 副本,可以在 shard 故障时提供备用服务,保证数据不丢失,另外 replica 还可以提升搜索操作的吞吐量。
shard 分片数量在建立索引时设置,设置后不能修改,默认5个;replica 副本数量默认1个,可随时修改数量;
3、什么是倒排索引:
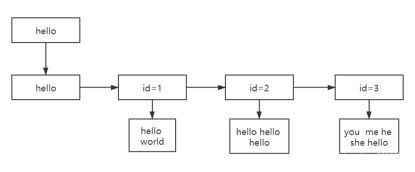
在搜索引擎中,每个文档都有对应的文档 ID,文档内容可以表示为一系列关键词的集合,例如,某个文档经过分词,提取了 20 个关键词,而通过倒排索引,可以记录每个关键词在文档中出现的次数和出现位置。也就是说,倒排索引是 关键词到文档 ID 的映射,每个关键词都对应着一系列的文件,这些文件中都出现了该关键词。
要注意倒排索引的两个细节:
- 倒排索引中的所有词项对应一个或多个文档
- 倒排索引中的词项 根据字典顺序升序排列
4、doc_values 的作用:
倒排索引虽然可以提高搜索性能,但也存在缺陷,比如我们需要对数据做排序或聚合等操作时,lucene 会提取所有出现在文档集合的排序字段,然后构建一个排好序的文档集合,而这个步骤是基于内存的,如果排序数据量巨大的话,容易造成内存溢出和性能缓慢。
doc_values 就是 es 在构建倒排索引的同时,会对开启 doc_values 的字段构建一个有序的 “document文档 ==> field value” 的列式存储映射,可以看作是以文档维度,实现了根据指定字段进行排序和聚合的功能,降低对内存的依赖。另外 doc_values 保存在操作系统的磁盘中,当 doc_values 大于节点的可用内存,ES可以从操作系统页缓存中加载或弹出,从而避免发生内存溢出的异常,但如果 docValues 远小于节点的可用内存,操作系统就自然将所有 doc_values 存于内存中(堆外内存),有助于快速访问。
更多 doc_values 的介绍与使用欢迎阅读这篇文章:ElasticSearch搜索引擎:doc_values详细介绍
5、text 和 keyword类型的区别:
两个类型的区别主要是分词:keyword 类型是不会分词的,直接根据字符串内容建立倒排索引,所以keyword类型的字段只能通过精确值搜索到;Text 类型在存入 Elasticsearch 的时候,会先分词,然后根据分词后的内容建立倒排索引
6、query 和 filter 的区别?
(1)query:查询操作不仅仅会进行查询,还会计算分值,用于确定相关度;
(2)filter:查询操作仅判断是否满足查询条件,不会计算任何分值,也不会关心返回的排序问题,同时,filter 查询的结果可以被缓存,提高性能。
二、ES的写入流程:
1、ES写数据的整体流程:
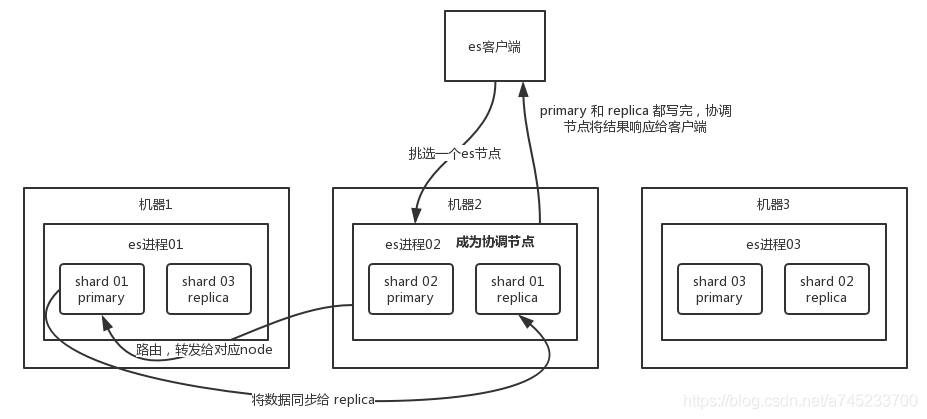
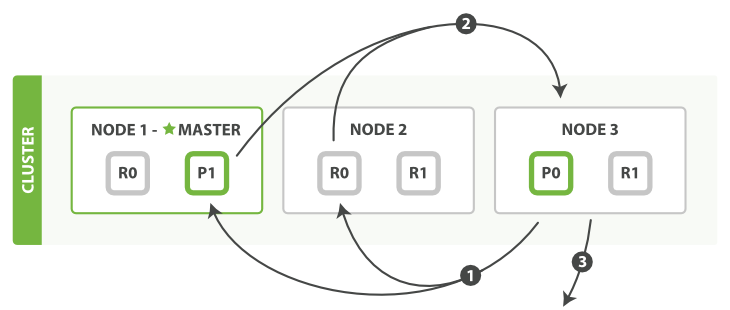
- (1)客户端选择 ES 的某个 node 发送请求过去,这个 node 就是协调节点 coordinating node
- (2)coordinating node 对 document 进行路由,将请求转发给对应的 node(有 primary shard)
- (3)实际的 node 上的 primary shard 处理请求,然后将数据同步到 replica node
- (4)coordinating node 等到 primary node 和所有 replica node 都执行成功之后,最后返回响应结果给客户端。
2、ES主分片写数据的详细流程:
(1)主分片先将数据写入ES的 memory buffer,然后定时(默认1s)将 memory buffer 中的数据写入一个新的 segment 文件中,并进入操作系统缓存 Filesystem cache(同时清空 memory buffer),这个过程就叫做 refresh;每个 segment 文件实际上是一些倒排索引的集合, 只有经历了 refresh 操作之后,这些数据才能变成可检索的。
ES 的近实时性:数据存在 memory buffer 时是搜索不到的,只有数据被 refresh 到 Filesystem cache 之后才能被搜索到,而 refresh 是每秒一次, 所以称 es 是近实时的;可以手动调用 es 的 api 触发一次 refresh 操作,让数据马上可以被搜索到;
(2)由于 memory Buffer 和 Filesystem Cache 都是基于内存,假设服务器宕机,那么数据就会丢失,所以 ES 通过 translog 日志文件来保证数据的可靠性,在数据写入 memory buffer 的同时,将数据也写入 translog 日志文件中,当机器宕机重启时,es 会自动读取 translog 日志文件中的数据,恢复到 memory buffer 和 Filesystem cache 中去。
ES 数据丢失的问题:translog 也是先写入 Filesystem cache,然后默认每隔 5 秒刷一次到磁盘中,所以默认情况下,可能有 5 秒的数据会仅仅停留在 memory buffer 或者 translog 文件的 Filesystem cache中,而不在磁盘上,如果此时机器宕机,会丢失 5 秒钟的数据。也可以将 translog 设置成每次写操作必须是直接 fsync 到磁盘,但是性能会差很多。
(3)flush 操作:不断重复上面的步骤,translog 会变得越来越大,不过 translog 文件默认每30分钟或者 阈值超过 512M 时,就会触发 commit 操作,即 flush操作,将 memory buffer 中所有的数据写入新的 segment 文件中, 并将内存中所有的 segment 文件全部落盘,最后清空 translog 事务日志。
- ① 将 memory buffer 中的数据 refresh 到 Filesystem Cache 中去,清空 buffer;
- ② 创建一个新的 commit point(提交点),同时强行将 Filesystem Cache 中目前所有的数据都 fsync 到磁盘文件中;
- ③ 删除旧的 translog 日志文件并创建一个新的 translog 日志文件,此时 commit 操作完成
更多 ES 的数据写入流程的说明欢迎阅读这篇文章:ElasticSearch搜索引擎:数据的写入流程
三、ES的更新和删除流程:
删除和更新都是写操作,但是由于 Elasticsearch 中的文档是不可变的,因此不能被删除或者改动以展示其变更;所以 ES 利用 .del 文件 标记文档是否被删除,磁盘上的每个段都有一个相应的.del 文件
(1)如果是删除操作,文档其实并没有真的被删除,而是在 .del 文件中被标记为 deleted 状态。该文档依然能匹配查询,但是会在结果中被过滤掉。
(2)如果是更新操作,就是将旧的 doc 标识为 deleted 状态,然后创建一个新的 doc。
memory buffer 每 refresh 一次,就会产生一个 segment 文件 ,所以默认情况下是 1s 生成一个 segment 文件,这样下来 segment 文件会越来越多,此时会定期执行 merge。每次 merge 的时候,会将多个 segment 文件合并成一个,同时这里会将标识为 deleted 的 doc 给物理删除掉,不写入到新的 segment 中,然后将新的 segment 文件写入磁盘,这里会写一个 commit point ,标识所有新的 segment 文件,然后打开 segment 文件供搜索使用,同时删除旧的 segment 文件
有关segment段合并过程,欢迎阅读这篇文章:Elasticsearch搜索引擎:ES的segment段合并原理
四、ES的搜索流程:
搜索被执行成一个两阶段过程,即 Query Then Fetch:
1、Query阶段:
客户端发送请求到 coordinate node,协调节点将搜索请求广播到所有的 primary shard 或 replica,每个分片在本地执行搜索并构建一个匹配文档的大小为 from + size 的优先队列。接着每个分片返回各自优先队列中 所有 docId 和 打分值 给协调节点,由协调节点进行数据的合并、排序、分页等操作,产出最终结果。
2、Fetch阶段:
协调节点根据 Query阶段产生的结果,去各个节点上查询 docId 实际的 document 内容,最后由协调节点返回结果给客户端。
- coordinate node 对 doc id 进行哈希路由,将请求转发到对应的 node,此时会使用 round-robin 随机轮询算法,在 primary shard 以及其所有 replica 中随机选择一个,让读请求负载均衡。
- 接收请求的 node 返回 document 给 coordinate node 。
- coordinate node 返回 document 给客户端。
Query Then Fetch 的搜索类型在文档相关性打分的时候参考的是本分片的数据,这样在文档数量较少的时候可能不够准确,DFS Query Then Fetch 增加了一个预查询的处理,询问 Term 和 Document frequency,这个评分更准确,但是性能会变差。
五、ES在高并发下如何保证读写一致性?
(1)对于更新操作:可以通过版本号使用乐观并发控制,以确保新版本不会被旧版本覆盖
每个文档都有一个_version 版本号,这个版本号在文档被改变时加一。Elasticsearch使用这个 _version 保证所有修改都被正确排序,当一个旧版本出现在新版本之后,它会被简单的忽略。
利用_version的这一优点确保数据不会因为修改冲突而丢失,比如指定文档的version来做更改,如果那个版本号不是现在的,我们的请求就失败了。
(2)对于写操作,一致性级别支持 quorum/one/all,默认为 quorum,即只有当大多数分片可用时才允许写操作。但即使大多数可用,也可能存在因为网络等原因导致写入副本失败,这样该副本被认为故障,副本将会在一个不同的节点上重建。
- one:写操作只要有一个primary shard是active活跃可用的,就可以执行
- all:写操作必须所有的primary shard和replica shard都是活跃可用的,才可以执行
- quorum:默认值,要求ES中大部分的shard是活跃可用的,才可以执行写操作
(3)对于读操作,可以设置 replication 为 sync(默认),这使得操作在主分片和副本分片都完成后才会返回;如果设置replication 为 async 时,也可以通过设置搜索请求参数 _preference 为 primary 来查询主分片,确保文档是最新版本。
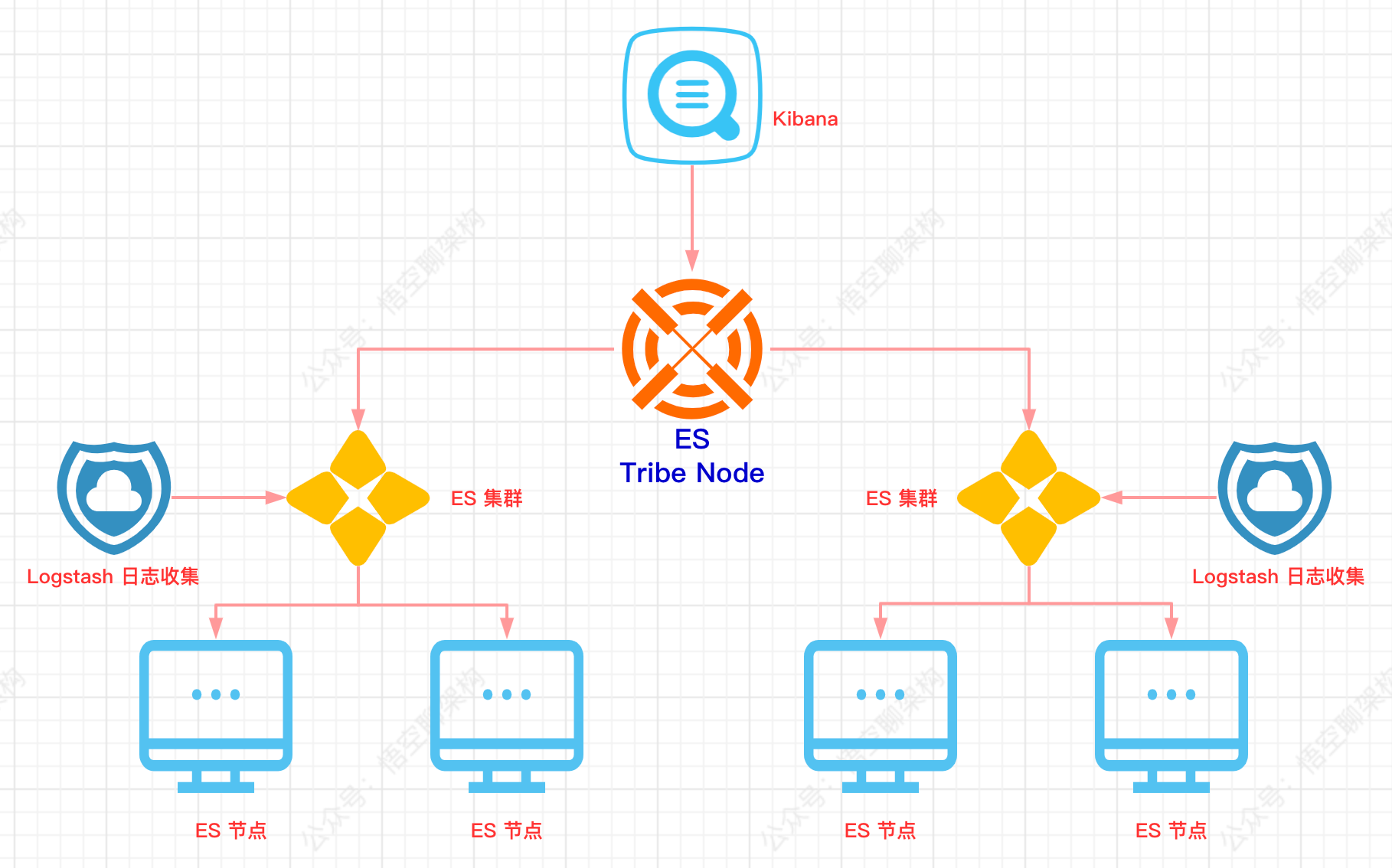
六、ES集群如何选举Master节点:
1、Elasticsearch 的分布式原理:
Elasticsearch 会对存储的数据进行切分,划分到不同的分片上,同时每一个分片会生成多个副本,从而保证分布式环境的高可用。ES集群中的节点是对等的,节点间会选出集群的 Master,由 Master 会负责维护集群状态信息,并同步给其他节点。
Elasticsearch 的性能会不会很低:不会,ES只有建立 index 和 type 时需要经过 Master,而数据的写入有一个简单的 Routing 规则,可以路由到集群中的任意节点,所以数据写入压力是分散在整个集群的。
2、ES集群 如何 选举 Master:
Elasticsearch 的选主是 ZenDiscovery 模块负责的,主要包含Ping(节点之间通过这个RPC来发现彼此)和 Unicast(单播模块包含一个主机列表以控制哪些节点需要ping通)这两部分;
- (1)确认候选主节点的最少投票通过数量(elasticsearch.yml 设置的值 discovery.zen.minimum_master_nodes)
- (2)选举时,集群中每个节点对所有 master候选节点(node.master: true)根据 nodeId 进行字典排序,然后选出第一个节点(第0位),暂且认为它是master节点。
- (3)如果对某个节点的投票数达到阈值,并且该节点自己也选举自己,那这个节点就是master;否则重新选举一直到满足上述条件。
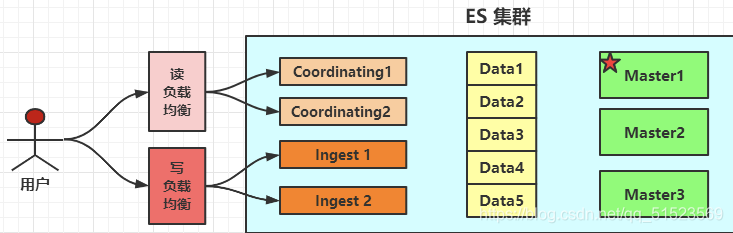
补充:master节点的职责主要包括集群、节点和索引的管理,不负责文档级别的管理;data节点可以关闭http功能。
3、Elasticsearch是如何避免脑裂现象:
(1)当集群中 master 候选节点数量不小于3个时(node.master: true),可以通过设置最少投票通过数量(discovery.zen.minimum_master_nodes),设置超过所有候选节点一半以上来解决脑裂问题,即设置为 (N/2)+1;
(2)当集群 master 候选节点 只有两个时,这种情况是不合理的,最好把另外一个node.master改成false。如果我们不改节点设置,还是套上面的(N/2)+1公式,此时discovery.zen.minimum_master_nodes应该设置为2。这就出现一个问题,两个master备选节点,只要有一个挂,就选不出master了
七、建立索引阶段性能提升方法:
- (1)如果是大批量导入,可以设置 index.number_of_replicas: 0 关闭副本,等数据导入完成之后再开启副本
- (2)使用批量请求并调整其大小:每次批量数据 5–15 MB 大是个不错的起始点。
- (3)如果搜索结果不需要近实时性,可以把每个索引的 index.refresh_interval 改到30s
- (4)增加 index.translog.flush_threshold_size 设置,从默认的 512 MB 到更大一些的值,比如 1 GB
- (5)使用 SSD 存储介质
- (6)段和合并:Elasticsearch 默认值是 20 MB/s。但如果用的是 SSD,可以考虑提高到 100–200 MB/s。如果你在做批量导入,完全不在意搜索,你可以彻底关掉合并限流。
八、ES的深度分页与滚动搜索scroll
(1)深度分页:
深度分页其实就是搜索的深浅度,比如第1页,第2页,第10页,第20页,是比较浅的;第10000页,第20000页就是很深了。搜索得太深,就会造成性能问题,会耗费内存和占用cpu。而且es为了性能,他不支持超过一万条数据以上的分页查询。那么如何解决深度分页带来的问题,我们应该避免深度分页操作(限制分页页数),比如最多只能提供100页的展示,从第101页开始就没了,毕竟用户也不会搜的那么深。
(2)滚动搜索:
一次性查询1万+数据,往往会造成性能影响,因为数据量太多了。这个时候可以使用滚动搜索,也就是 scroll。 滚动搜索可以先查询出一些数据,然后再紧接着依次往下查询。在第一次查询的时候会有一个滚动id,相当于一个锚标记 ,随后再次滚动搜索会需要上一次搜索滚动id,根据这个进行下一次的搜索请求。每次搜索都是基于一个历史的数据快照,查询数据的期间,如果有数据变更,那么和搜索是没有关系的。
相关阅读:
Spring常见面试题总结
SpringMVC常见面试题总结
Mybatis常见面试题总结
MySQL常见面试题总结
Redis常见面试题总结
RabbitMQ消息队列常见面试题总结
ElasticSearch搜索引擎常见面试题总结
计算机网络常见面试题总结
操作系统常见面试题总结
Java基础、集合、多线程常见面试题总结
Java虚拟机常见面试题总结
Java常见设计模式总结
海量数据处理的方法总结