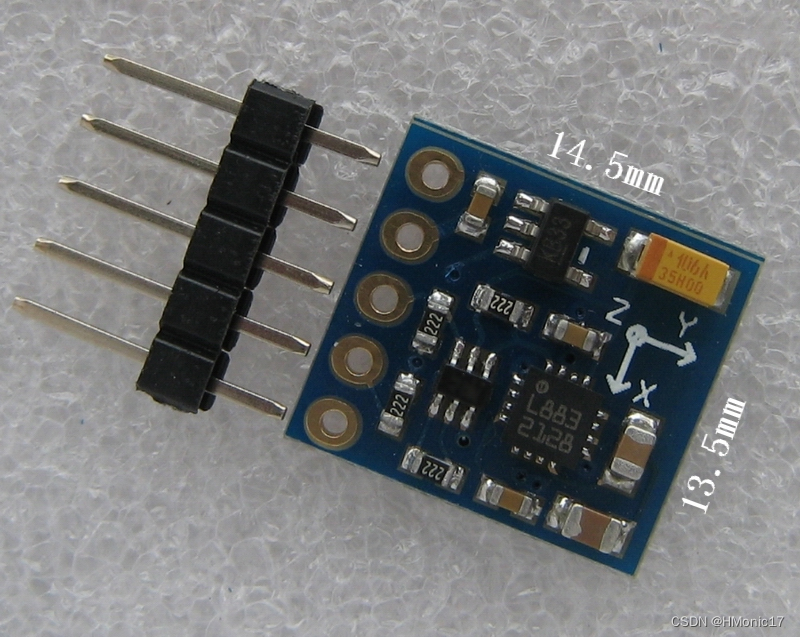
HMC5883L是一种IIC通信的电子罗盘芯片,输出与北的角度偏差,数值是0-360度,靠西方向增长,可以理解为逆时针为正。配合GPS模块简直就是四轴飞行器的铁杆标配。
5883的初始化
HMC5883L也是一个IIC器件,具体的操作方式和前面介绍的MPU6050类似,这里就不在赘述了。主要区别在于5883作为IIC从机时,其地址为0x3C。
初始化HMC5883
初始化HMC5883的方法和初始化MPU6050的方法差不太多,主要是模拟出IIC信号,对对应的寄存器操作,具体的可查看HMC5883的说明手册。
void HMC5883L_Init(){ MPU_IIC_Init();//初始化IICMPU_IIC_Start();MPU_IIC_Send_Byte(0x3c); MPU_IIC_Wait_Ack(); MPU_IIC_Send_Byte(0x00); MPU_IIC_Wait_Ack(); MPU_IIC_Send_Byte(0x14);//模拟IIC的信号时序MPU_IIC_Start();MPU_IIC_Send_Byte(0x3c); //写指令MPU_IIC_Wait_Ack();MPU_IIC_Send_Byte(0x01); MPU_IIC_Wait_Ack();MPU_IIC_Send_Byte(0x20); MPU_IIC_Wait_Ack();MPU_IIC_Stop();}读取数据
MPU_IIC_Start();MPU_IIC_Send_Byte(0x3c); // HMC5883L,0x3c,0x03读取这两个地址的寄存器数据,分别为LSB和MSBMPU_IIC_Wait_Ack(); MPU_IIC_Send_Byte(0x03); //MPU_IIC_Wait_Ack(); MPU_IIC_Start(); MPU_IIC_Send_Byte(0x3d); //读数据MPU_IIC_Wait_Ack();for(i=0;i<5;i++) //第六次不应答{XYZ_Data[i]=MPU_IIC_Read_Byte(1);}XYZ_Data[5] =MPU_IIC_Read_Byte(0); MPU_IIC_Stop();delay_ms(5);数据处理
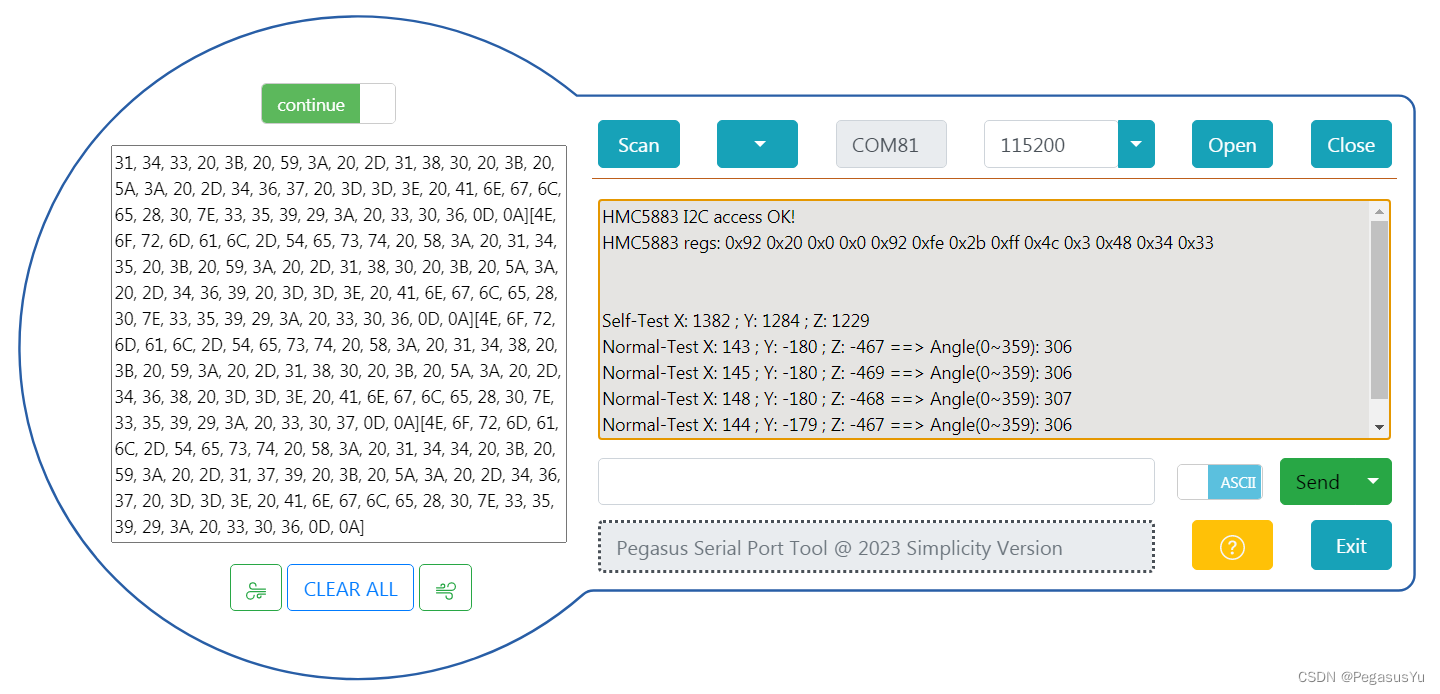
读出寄存器的原始数据之后,下一步应该将数据进行处理,比如多次求和取平均,然后利用磁偏角方位公式算出偏角。
void HMC58X3_newValues(int16_t x,int16_t y,int16_t z)
{unsigned char i ;int32_t sum=0;for(i=1;i<10;i++){HMC5883_FIFO[0][i-1]=HMC5883_FIFO[0][i];HMC5883_FIFO[1][i-1]=HMC5883_FIFO[1][i];HMC5883_FIFO[2][i-1]=HMC5883_FIFO[2][i];}HMC5883_FIFO[0][9]=x;HMC5883_FIFO[1][9]=y;HMC5883_FIFO[2][9]=z;sum=0;for(i=0;i<10;i++){ //求和取平均sum+=HMC5883_FIFO[0][i];}HMC5883_FIFO[0][10]=sum/10; //将平均值更新sum=0;for(i=0;i<10;i++){sum+=HMC5883_FIFO[1][i];}HMC5883_FIFO[1][10]=sum/10;sum=0;for(i=0;i<10;i++){sum+=HMC5883_FIFO[2][i];}HMC5883_FIFO[2][10]=sum/10;}取平均值之后,利用磁偏角公式可以求出角度。
Angle = (atan2(Y,X) * (180 / 3.14159265) + 180);
HMC5883的问题
如果前面MPU6050弄明白了,那5883也很容易弄懂。值得注意的有如下两个问题:
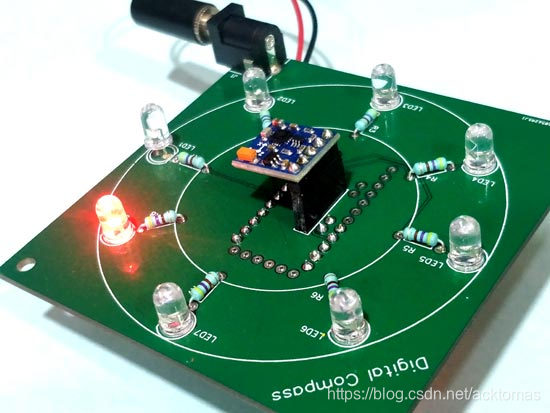
- 接线
HMC5883和MPU605需要连接在同一个IIC总线上,下图是我们的接线方式。


最下方是没有用到的BMP模块 - 四元数融合算法
要将HMC5883用到自主导航小车的姿态估算中,我们采用的是四元数融合算法,需要上传MPU6050和HMC5883的原始数据。如何进行四元数融合解算,我准备在下一篇文章写出。


![[11]ESP32+三轴磁罗盘HMC5883L移植与调试](https://img-blog.csdnimg.cn/20190829132409951.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzIwNTE1NDYx,size_16,color_FFFFFF,t_70)