ECV-2021极市计算机视觉开发者榜单大赛(以下简称ECV-2021)已于2021年7月6日正式开赛!
ECV-2021由青岛市人民政府指导,极视角科技有限公司、 青岛市委台港澳办、青岛市工业和信息化局、青岛西海岸新区管委和青岛市城市管理局主办,青岛银行为独家金融支持单位,英特尔(中国)有限公司为战略合作伙伴,中国模式识别与计算机视觉大会(PRCV 2021)提供学术支持,极市平台、OpenVINO™工具套件提供技术支持,马达智数提供数据支持。
报名链接:https://www.cvmart.net/list/ECV2021
初赛阶段时间为7月6日-8月19日,8月19日截止报名,请各位开发者安排好参赛时间。
评审规则
大赛分为 初赛(线上开发算法)和决赛(线上答辩)两个比赛环节。
大赛总成绩=线上算法比赛成绩占70%,决赛答辩成绩占30%。
初赛
初赛时间:2021年7月6号 - 2021年8月19号
初赛形式:在既定8种命题中选择,线上完成算法开发,并使用OpenVINO™工具完成模型转换,并通过自动测试,得出算法总分。
初赛评审规则:算法精度占80%,算法性能占20%,具体计算规则见各赛题的评审规则。
初赛晋级规则:每个赛题的排行榜总分排名前8名队伍进入决赛阶段。
决赛
决赛时间:2021年9月7号 - 2021年9月16号
提交作品:算法应用演示视频,决赛答辩演讲PPT(官方将在9月6号截止作品提交)
决赛形式:入围决赛的队伍将进行视频答辩,讲解并演示自己的参赛作品应用。评审将依据评审规则统一进行评分,决出奖项归属。
决赛评选规则:评审将依据评审规则统一进行评分,选手决赛成绩取所有评委的平均分,最终决出奖项归属。
大赛奖项
8个赛题分开评奖,奖项设置一致,参赛者可多选赛题报名,可重复获奖!

*注:极力值可在极市平台兑换算力或礼品,兑换规则详见极力值说明:https://www.cvmart.net/document
8大赛题详解
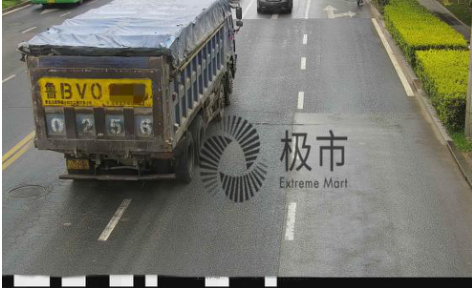
赛题一:渣土车车牌识别
样例图:
|
|

数据集是由监控摄像头采集的现场场景数据,图片形式,jpg格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(10000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(5000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据标注文件为VOC格式的xml文件, 采用bounding box标注的方式。bounding box框住的是渣土车和车牌,一张图片对应一个标注文件XML,标注文件的命名与对应图片名字一样。
其中目标类别包含两种类型:
trigcar | 表示渣土车,每个trigcar内还包含一个variable_text,表示这个渣土车对应的车牌,此标签用于自动测试。 |
license_plate | 表示车牌,包含车牌的位置及其包含的文本。 |
赛题二:反光衣识别
样例图:
|
|
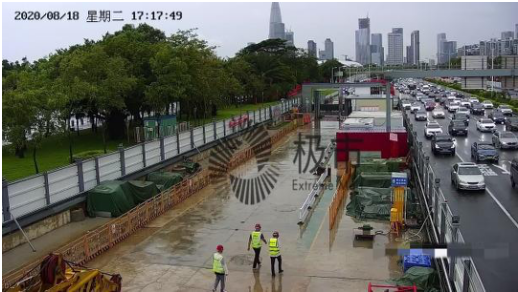

数据集是由监控摄像头采集的现场场景数据,图片形式,jpg格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(10000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(5000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据标注文件为VOC格式的xml文件, 一张图片对应一个标注文件XML,标注文件的命名与对应图片名字一样,采用bounding box标注的方式。bounding box框住的对象有四种标签,分别是:反光衣(clothes)、未穿反光衣(no_clothes)、穿反光衣的人(person_clothes)、未穿或不规范穿反光衣的人(person_no_clothes)。
您需要对这两个类别进行识别:person_clothes、person_no_clothes。其他两个类别用于辅助算法开发。
赛题三:驾驶员不良驾驶识别
样例图:
|
|


数据集来自于由摄像头采集的视频片段,每段视频经过分帧后被转成JPG格式的图片并存入到一个文件夹中,每张图片采用frame_id.jpg的命名格式,其中frame_id表示以1为起始的帧序号。每个图片文件夹都会有一个对应的标注文件,文件名称与文件夹一致,格式为XML,包含的标注类别如下所示:抽烟(smoke)、打哈欠(yawn)、打手机(phone)、驾驶员异常(a_driver)、左顾右盼(look_around)
样例数据集:每种类别分别会有几个视频帧集合,供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:抽烟 400, 打哈欠 110, 打手机 400, 驾驶员异常 400, 左顾右盼 700,文件夹名称即为类别名称,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:抽烟 100, 打哈欠 40, 打手机 100, 驾驶员异常 100, 左顾右盼 300,参赛者成功发起测试任务,即可自动读取;
赛题四:船只数量识别
样例图:
|
|


数据集是由监控摄像头采集的现场场景数据,图片形式,jpg格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(10000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(5000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据标注文件为VOC格式的xml文件, 采用bounding box标注的方式。bounding box框住的对象有一种标签,这个标签为船只(boat)。一张图片对应一个标注文件,标注文件的命名与对应图片名字一样。
赛题五:机动车识别
样例图:
|
|


数据集是由监控摄像头采集的现场场景数据,图片形式,jpg格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(10000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(5000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据标注文件为VOC格式的xml文件, 采用bounding box标注的方式。bounding box框住的是机动车,一张图片对应一个标注文件XML,标注文件的命名与对应图片名字一样。
数据标签分为三个类别,您需要对这三个类别进行识别:
小汽车 car | 轿车、跑车、SUV、MPV商务车、小型面包车(蓝牌)等四轮小汽车,客车、大货车、公共汽车、拖拉机等。 |
三轮小汽车 tricar | 如老年代步三轮车,不含三轮自行车、三轮摩托车和三轮电动车。 |
摩托车 motorbike | 含摩托车、电瓶车。 |
赛题六:占道经营检测
样例图:
|
|


数据集是由监控摄像头采集的现场场景数据,图片形式,jpg格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(10000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(5000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据标注文件为VOC格式的xml文件, 采用bounding box标注的方式。bounding box框住的是摊贩,一张图片对应一个标注文件XML,标注文件的命名与对应图片名字一样。
数据标签分为三个类别,您需要对这三个类别进行识别:
固定摆摊fixed_stall | 街道、人行道周边的地面摊位。 |
移动摆摊 move_stall | 三轮车、贩卖小货车等。 |
遮阳伞sunshade | 遮阳伞、临时贩卖小棚。 |
赛题七:电动车进电梯识别
样例图:
|
|

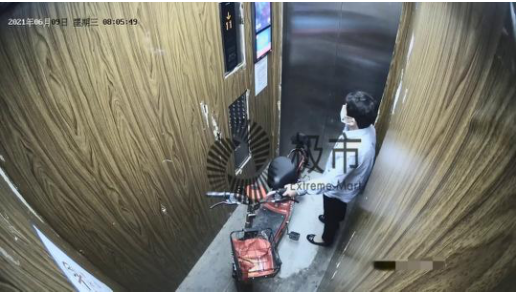
数据集是由监控摄像头采集的现场场景数据,图片形式,jpg格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(10000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(5000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据标注文件为VOC格式的xml文件, 一张图片对应一个标注文件XML,标注文件的命名与对应图片名字一样,采用bounding box标注的方式。bounding box框住的对象有三种标签,分别是:人(person)、自行车(bicycle)、电动自行车(e_vehicle),您需要对这三个类别进行识别。
赛题八:人体解析分割
样例图:
|
|


数据集是由监控摄像头采集的现场场景数据,图片形式,PNG格式。
样例数据集:摄像头采集信息(100张),供参赛者了解赛题典型场景数据,可用于编码调试;
训练数据集:监控摄像头采集信息(6000张),含标注信息,参赛者需要在编码调试完成后,发起训练任务方可自动读取;
测试数据集:摄像头采集信息(1000张),不含标注信息,参赛者成功发起测试任务,即可自动读取;
数据集包含原图片以及相对应分割后的图片(标注文件),标注文件的格式为PNG,并且为单通道灰度图。该数据集拥有20种语义类别,其内容(像素值-类别名称)如下所示:
0-背景 (Background) | 1-帽子(Hat) | 2-头发(Hair) | 3-手套(Glove) | 4-太阳镜(Sunglasses) |
5-上衣 (UpperClothes) | 6-裙子(Dress) | 7-外套(Coat) | 8-短袜(Socks) | 9-裤子(Pants) |
10-连身长裤(Jumpsuits) | 11-围巾(Scarf) | 12-短裙(Skirt) | 13-脸(Face) | 14-左臂(Left-arm) |
15-右臂 (Right-arm) | 16-左腿 (Left-leg) | 17-右腿 (Right-leg) | 18 左鞋 (Left-shoe) | 19-右鞋 (Right-shoe) |
参赛对象
1、大赛面向全社会开放,个人、高等院校、企业、创客团队等人员均可报名参赛;
2、每位选手、每个赛题仅能加入一支参赛队伍,每只队伍仅限3人组队。
*注:
1、除大赛主办方中涉及题目编写、数据接触的人员外,均可报名
2、大赛合作伙伴及其关联方/雇员参赛,仅参与排名,不参与评奖及奖金领取。
报名须知
1、扫码进入官网,选择赛题后登录极市开发者平台,完成报名信息后,即可报名参赛;

*请确保报名信息准确有效,否则会被取消参赛资格及奖励;
2、加入大赛交流群
扫码加入大赛QQ交流群,或添加极小东微信(cvmart3),加入大赛微信交流群。

大赛QQ交流群
(496683217)

极小东微信号
(cvmart3)
3、大赛论坛交流:https://bbs.cvmart.net
大赛支持/协办单位