VisionPro是Cognex的机器视觉算法软件,通常的做法是使用VS做二次开发。
这里主要分享VisionPro中通过ToolBlock实现一个视觉检测,以及通过调用单个Tool实现一个视觉检测。
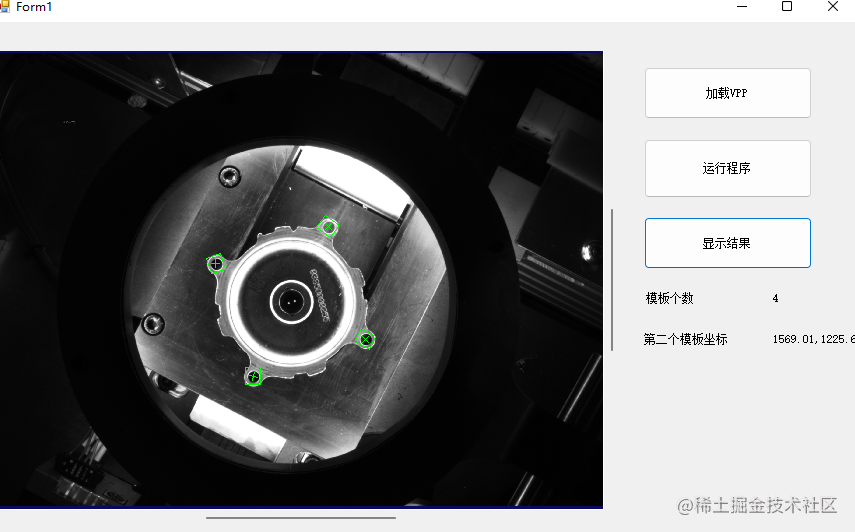
最终实现一个硬币数量检测以及坐标位置输出的应用:

使用ToolBlock的方式:
- 声明CogToolBlock类型的实例,并且序列化一个Vpp文件,编写vpp的过程这里不做赘述。
private CogToolBlock cogToolBlock2;
cogToolBlock2 = CogSerializer.LoadObjectFromFile(@"D:\C#Project\VisionPro_Control\VisionPro_Control\bin\x64\Debug\SampleVpp.vpp") as CogToolBlock;
//订阅ToolBlock的Ran事件,当ToolBlock执行完毕后程序会执行这个回调函数。
cogToolBlock2.Ran += new EventHandler(OnToolBlockRan);- 由于这里使用的图片回放的方式,并非工业相机,所以需要申明一个CogImageFileTool类型,以获取图像或者图像集(idb、cdb)文件。(如果是接入工业相机,则需要声明CogAcqFifoTool采像工具,或者实现ICogFrameGrabber接口的方式从相机中取像。)
private CogImageFileTool cogImageFileTool2;
cogImageFileTool2.Operator.Open(@"F:\VPRO_Install\VisionPro\Images\coins.idb", CogImageFileModeConstants.Read);- 为ToolBlock传入图像,并运行ToolBlock
//运行一次imageFileTool,则可以通过OutputImage属性获取到一张ICogImage类型的图片
cogImageFileTool2.Run();
//将获取的图片赋值给ToolBlock的Image引脚,这里的Inputs是一个只读索引器
//可以通过["Image"]赋值,前提是"Image"没有被重命名。也可以通过[0]的方式赋值。
cogToolBlock2.Inputs["Image"].Value = cogImageFileTool2.OutputImage as CogImage8Grey;
//除了传图片给ToolBlock之外,还可以传参数进去,比如传入Pattern的查找概数限制。
cogToolBlock2.Inputs["SetCount"].Value = (int)nud_SetCount.Value;
//图片有了,参数有了,运行ToolBlock
cogToolBlock2.Run();- 获取运行结果:
private void OnToolBlockRan(object sender, EventArgs e){//声明一个List集合获取ToolBlock的各种类型的运行结果List<DataObj> dataList = new List<DataObj>();//获取ToolBlock的结果输出引脚集合CogPMAlignResults resultList = (CogPMAlignResults)cogToolBlock2.Outputs["ResultList"].Value;//遍历,并添加到List集合中foreach (CogPMAlignResult item in resultList){dataList.Add(new DataObj(item.ID, item.GetPose().TranslationX, item.GetPose().TranslationY, item.GetPose().Rotation, item.GetPose().Scaling, item.Score));}//将获取到的集合赋值给DataGridView控件作为显示的图像源dgv_DataList.DataSource = dataList;//一般来说这里要做界面图片显示部分,这里不再赘述}使用单工具调用的方式:

- 声明工具实例:工具vpp文件的编写这里不做赘述
private CogImageFileTool cogImageFileTool; //图像文件private CogPMAlignTool cogPMAlignTool; //PMAlign图像识别工具private CogFixtureTool cogFixtureTool; //位置修正工具private CogBlobTool cogBlobTool; //斑点工具cogImageFileTool = new CogImageFileTool();cogPMAlignTool = new CogPMAlignTool();cogImageFileTool.Operator.Open(@"F:\VPRO_Install\VisionPro\Images\bracket_std.idb", CogImageFileModeConstants.Read);cogPMAlignTool = CogSerializer.LoadObjectFromFile(toolVpp + "pmalign_tool.vpp") as CogPMAlignTool;- 按顺序运行工具:
//获取图像
cogImageFileTool.Run();
//将图像赋值给PMAlign工具,并运行
cogPMAlignTool.InputImage = cogImageFileTool.OutputImage as CogImage8Grey;
cogPMAlignTool.Run();
//将图像赋值给定位修正工具,并获取PMAlign工具的线性转换矩阵
cogFixtureTool.InputImage = cogImageFileTool.OutputImage as CogImage8Grey;
cogFixtureTool.RunParams.UnfixturedFromFixturedTransform = cogPMAlignTool.Results[0].GetPose();
cogFixtureTool.Run();
//将位置修正后的图像赋值给Blob工具,并运行
cogBlobTool.InputImage = cogFixtureTool.OutputImage as CogImage8Grey;
cogBlobTool.Run();- 获取Blob工具的结果:
//这里显示在CogDisplay控件上,当然也可以显示在CogRecordDisplay控件上cogDisplay1.StaticGraphics.Clear();cogDisplay1.Image = image;//遍历Blob的结果集合,然后添加到CogDisplay绘制,这里显示斑点中心|边框foreach (CogBlobResult item in cogBlobTool.Results.GetBlobs()){ //CogBlobResult包含了这个斑点的所有信息,包括CenterOfMassX,CenterOfMassY,Area等等。。cogDisplay1.StaticGraphics.Add(item.CreateResultGraphics(CogBlobResultGraphicConstants.Boundary | CogBlobResultGraphicConstants.CenterOfMass), "");}cogDisplay1.Fit(true);
【END】