作为运维,你不一定要会写Java代码,但是一定要懂Java在生产跑起来之后的各种机制。
本文为《Hi,运维,你懂Java吗》系列文章 第一篇,敬请关注后续系列文章
欢迎关注 龙叔运维(公众号) 持续分享运维经验
前言
本篇对java的整体环境以及java程序的运行原理进行简单介绍,让运维们对java有一个初步的了解,更多详细内容在后续文章介绍。
1、java整体环境介绍
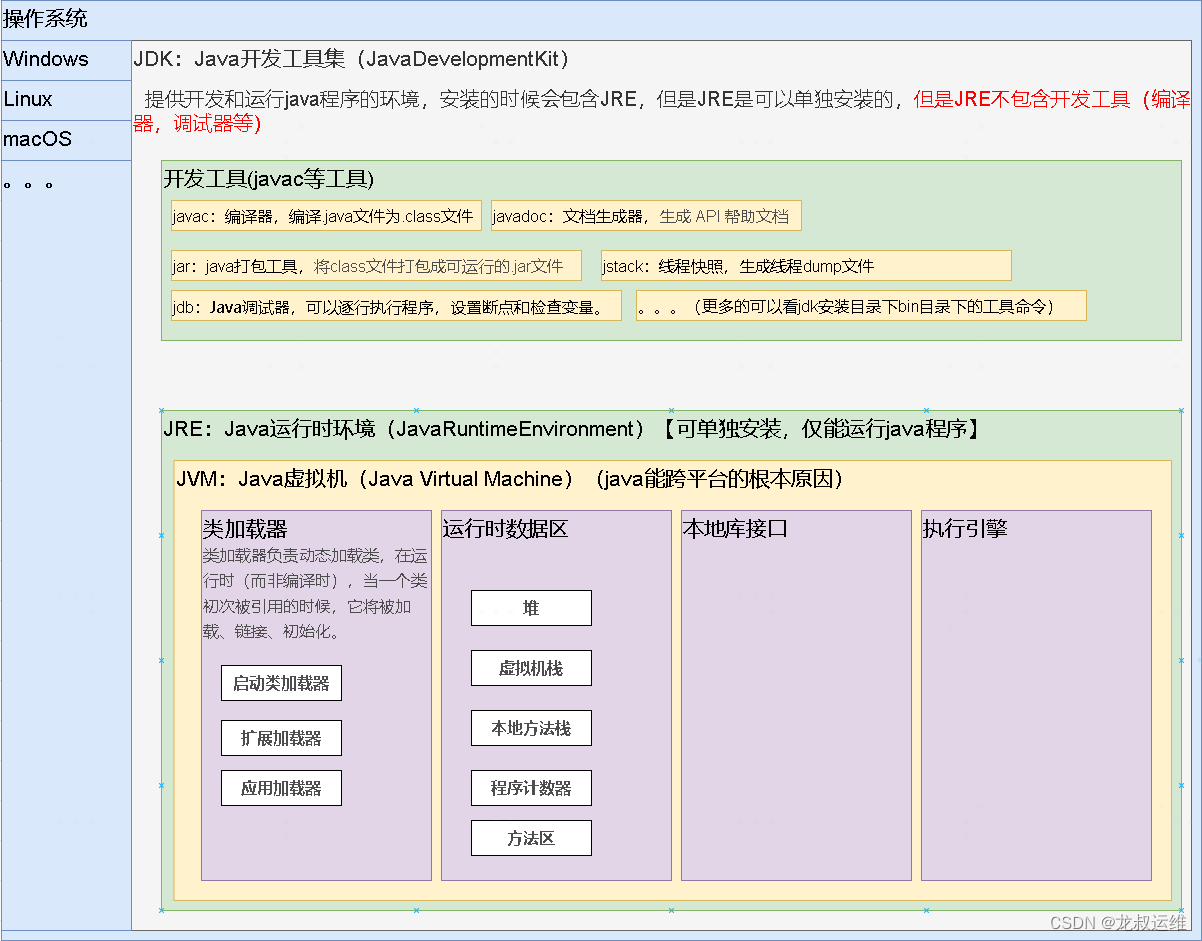
1.1、JDK:Java开发工具集(JavaDevelopmentKit)
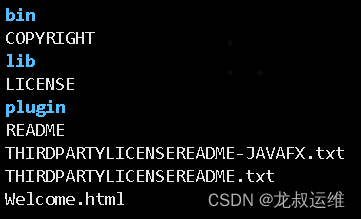
包含了java程序的开发以及运行环境所需的一切,安装了JDK也会包含JRE
安装目录如下:
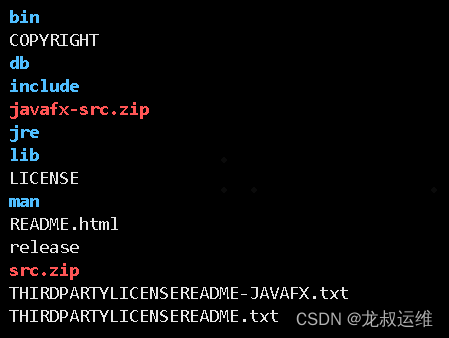
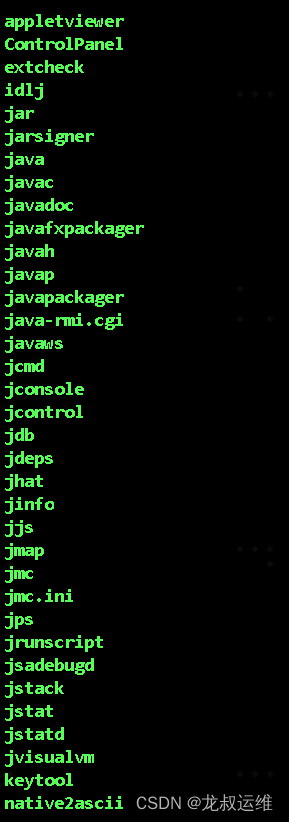
在bin目录下有很多工具命令
1.2、JRE:Java运行时环境(JavaRuntimeEnvironment)
仅仅支持java程序的运行,安装jdk的时候会一并包含,但是也可以单独安装
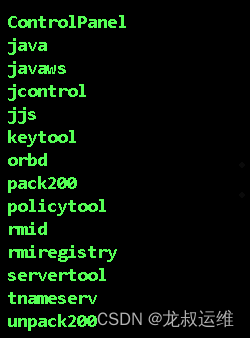
安装目录如下:
bin目录下相对于jdk,少了很多开发阶段使用的工具命令
1.3、JVM:Java虚拟机(Java Virtual Machine)
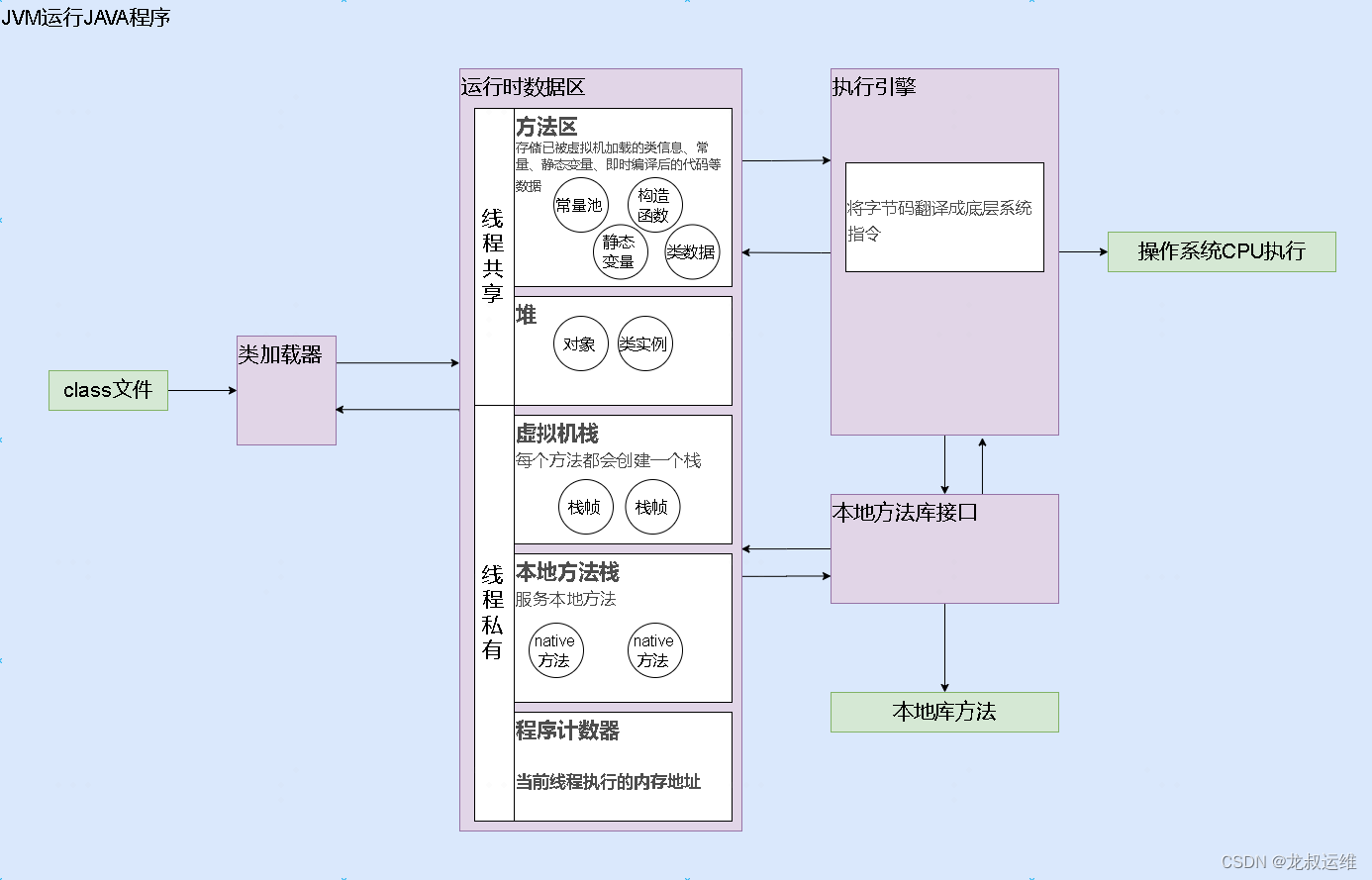
java 是跨平台语言,可以在任何操作系统进行开发以及运行,其核心就是靠的JVM,JVM中的类加载器将字节码(class文件)加载到内存中,然后执行器翻译成当前操作系统底层执系统指令进行执行。
就是因为有Java虚拟机(JVM)实现了程序与操作系统的分离,从而实现了Java 的平台无关性。
而JVM也是运维最需要关心的,基本运维关于JAVA运维方面的工作,百分之八十都是和JVM相关的。
2、java程序运行原理
java程序是在JVM上运行的,整体原理如下图
--------------------------本文完