就业班是面向工作,企业应用级别的学习。在这里我们将在游戏项目开发的深度和任务上有所提高。通过分析和开发大型的游戏项目,让大家熟练使用Unity,并分析大型游戏开发思路,为自己专业开发游戏和就业提供保障。
unity 赛车race(手游)
游戏介绍:相信男生们都喜欢玩爽快的赛车类游戏,那么你是否想要自己开发这样的一款游戏呢?在这里你将使用unity的开发技术,自己创建一个开发的,竞争性的赛车世界。同时可以让用户对汽车进行换装。

目录
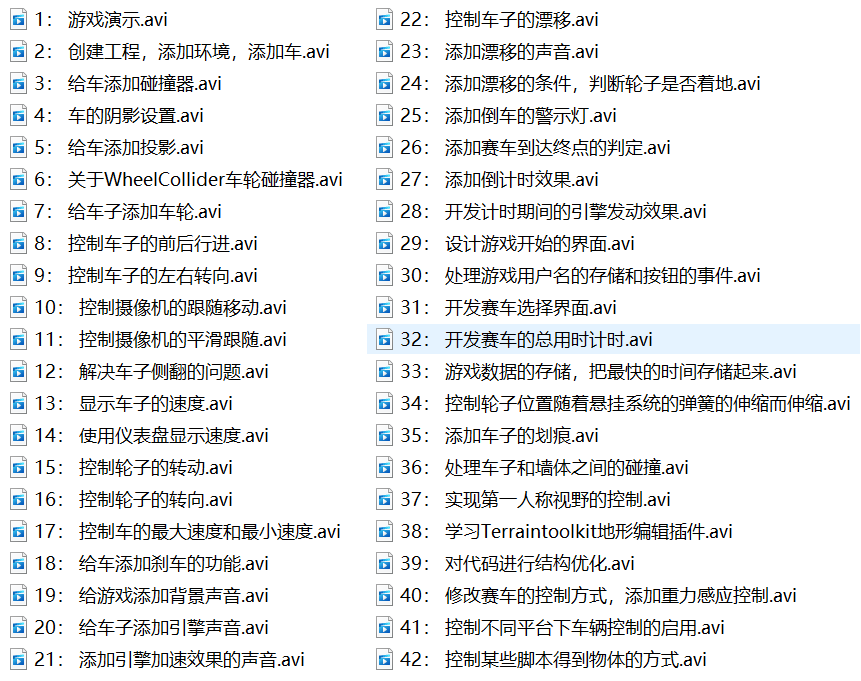

大小1.67G,avi格式
就业班是面向工作,企业应用级别的学习。在这里我们将在游戏项目开发的深度和任务上有所提高。通过分析和开发大型的游戏项目,让大家熟练使用Unity,并分析大型游戏开发思路,为自己专业开发游戏和就业提供保障。
unity 赛车race(手游)
游戏介绍:相信男生们都喜欢玩爽快的赛车类游戏,那么你是否想要自己开发这样的一款游戏呢?在这里你将使用unity的开发技术,自己创建一个开发的,竞争性的赛车世界。同时可以让用户对汽车进行换装。
目录
大小1.67G,avi格式