文章目录
- 什么是图像分割
- 分水岭算法
- 1、实现分水岭算法:watershed()函数
- 2、处理流程(视频)
- 3、示例程序(书中)
什么是图像分割
- 将图像中像素根据一定的规则分为若干个cluster集合,每个集合包含一类对象
如下,将两匹马从图像背景中抠出来

分水岭算法
解释:分水岭算法,是一种基于拓扑理论的数学形态学的分割方法。分割图像时可以从图像中获取有用的信息。
基本思想:把图像看作是测地学上的拓扑地貌,图像中每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形成分水岭。分水岭的概念和形成可以可以通过模拟侵入过程来说明:在每一个局部极小值表面,刺穿一个小孔,然后把整个模型慢慢侵入水中,随着侵入的加深,每一个局部极小值的影响域慢慢向外扩展,在两个集水盆汇合处构筑大坝,即形成分水岭。
分水岭的计算步骤:
- 排序过程
- 淹没过程
说明:首先对每个像素的灰度级进行从低到高的排序,然后在从低到高实现淹没的过程中,对每一个局部极小值在h阶高度的影响采用先进先出(FIFO)结构进行判断及标注。分水岭变换得到的是输入图像的集水盆图像,集水盆之间的边界点,即为分水岭。
同理,分水岭算法首先计算灰度图像的梯度;可以很好的区分图像中的“山谷”或没有纹理的“盆地”(亮度值低的点)的形成是很有效的。然后开始从用户指定点(或算法得到的点)开始持续“灌注”盆地直到这些区域连成一片。
1、实现分水岭算法:watershed()函数
函数watershed实现的分水岭算法是基于标记的分割算法中的一种。在把图像传给函数之前,需要大致勾画标记出图像中的期望进行分割的区域,被标记为正指数。每一个区域都会标记为像素值1,2,3,4等。表示成为一个或多个连接组件。这些标记的值可以使用findContours()函数和drawContours()函数由二进制的掩码检索出来。这些标记就是即将绘制出来的分割区域的“种子”,而没有标记清楚的区域,被置为0。在函数输出中,每一个标记中的像素被设置为“种子”的值,而区域间的值被设置为-1。
void watershed(InputArray image,InputOutputArray markers)
-
第一个参数:输入图像,即源图像。填Mat类的对象即可,且需为8位三通道的彩色图像
-
第二个参数:函数调用后的运算结构存在这里,输入/输出32单通道图像的标记结果。即这个参数用于存放函数调用后的输出结果,需要和源图片有一样的尺寸和类型
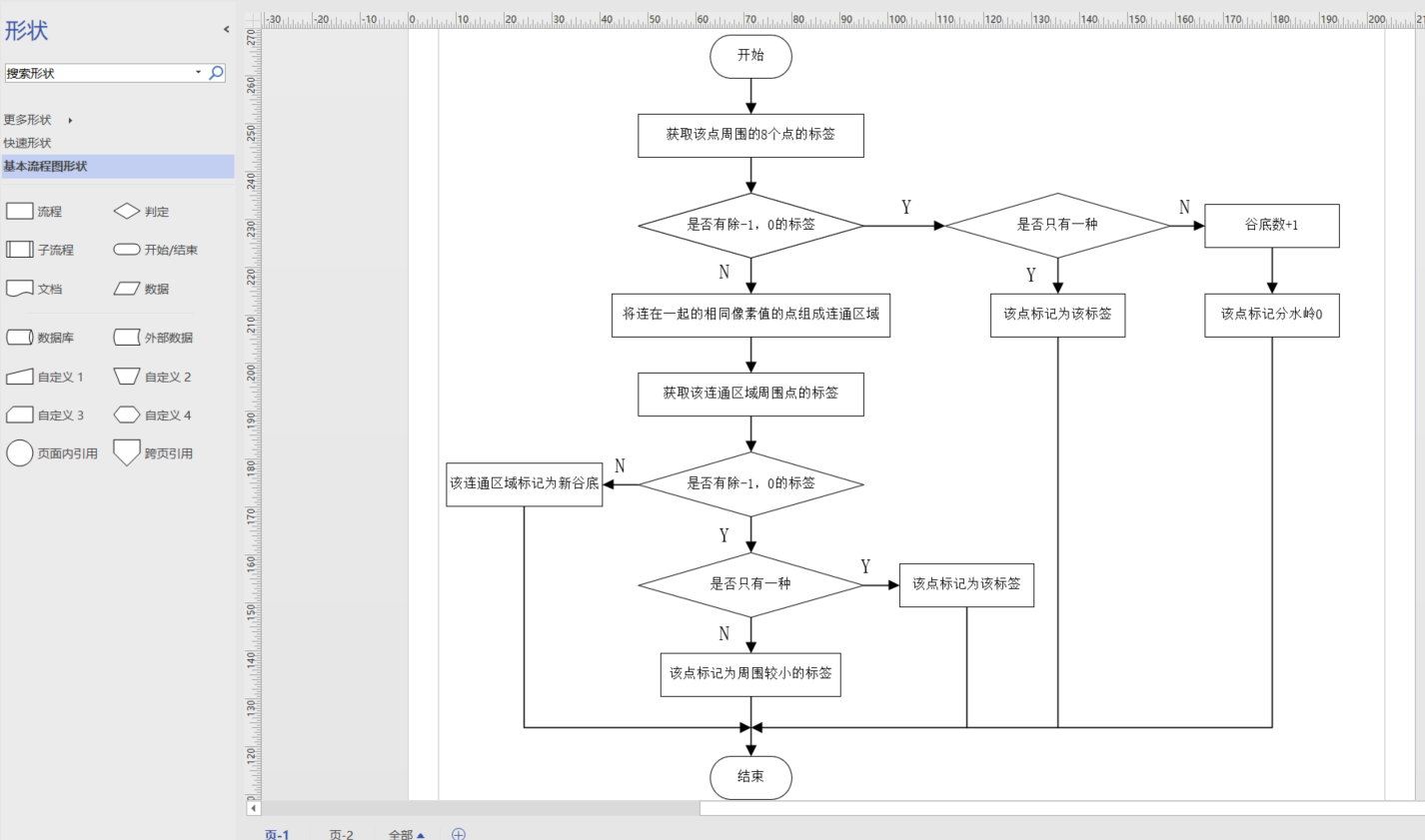
2、处理流程(视频)
-
将白色背景变成黑色 - 为后面的变换做准备
src = imread("E://Pec//fenshui.jpg");imshow(WINDOW_NAME, src);//修改背景for(int row=0;row<src.rows;row++)for (int col = 0; col < src.cols; col++){if (src.at<Vec3b>(row, col) == Vec3b(255, 255, 255)){src.at<Vec3b>(row, col)[0] = 0;src.at<Vec3b>(row, col)[1] = 0;src.at<Vec3b>(row, col)[2] = 0;}}//namedWindow("black backgroud", CV_WINDOW_AUTOSIZE);//imshow("black backgroud", src); -
使用filter2D与拉普拉斯算子实现图像对比度提高
//锐化,清晰边缘Mat kernel = (Mat_<float>(3, 3) << 1, 1, 1, 1, -8, 1, 1, 1, 1);Mat imgLaplance;Mat sharpImage = src;filter2D(src, imgLaplance, CV_32F, kernel, Point(-1, -1), 0, BORDER_DEFAULT);src.convertTo(sharpImage, CV_32F);Mat result = sharpImage - imgLaplance;//数据类型之间的转换result.convertTo(result, CV_8UC3);imgLaplance.convertTo(imgLaplance, CV_8UC3);//imshow("sharpImage", result); -
转换为二值图像
//二值图像变换Mat binaryImag;//灰度转换cvtColor(src, result, CV_BGR2GRAY);threshold(result, binaryImag, 40, 255, THRESH_BINARY | THRESH_OTSU);//imshow("二值化图像", binaryImag); -
距离变换
//二值距离变换Mat distImage;distanceTransform(binaryImag, distImage, DIST_L2, 3); -
对距离变换的结果进行归一化到[0~1]之间
//0-归一化上限,1-归一化下限。归一化标量:映射到[a,b]范围normalize(distImage, distImage, 0, 1, NORM_MINMAX); -
使用阈值,再次二值化,得到标记
threshold(distImage, distImage, .4, 1, THRESH_BINARY );//imshow("距离变换后-二值化", distImage); -
腐蚀得到每个Peak - erode
//二值腐蚀Mat kl = Mat::ones(3, 3, CV_8UC1);erode(distImage, distImage, kl , Point(-1, -1));imshow("腐蚀之后", distImage); -
发现轮廓 - drawContours
//掩膜Mat dist_8u;distImage.convertTo(dist_8u, CV_8U);vector<vector<Point>>contours;findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));Mat markers = Mat::zeros(src.size(), CV_32SC1);//循环绘制轮廓for (size_t i= 0; i<contours.size(); i++)drawContours(markers, contours, static_cast<int>(i), Scalar(static_cast<int>(i)+1),-1);circle(markers, Point(3, 3), 3, Scalar(255, 255, 255), -1);//imshow("markers", markers*1000); -
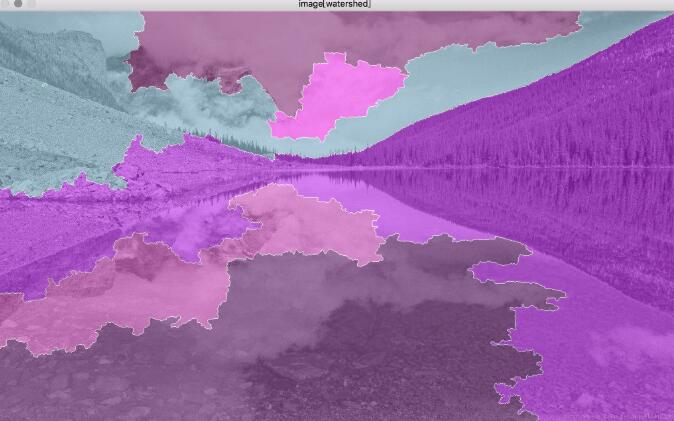
分水岭变换
//分水岭变换watershed(src, markers);//双层循环,将分水岭图像遍历存入mark中Mat mark(markers.size(), CV_8UC1);markers.convertTo(mark, CV_8UC1);//取反bitwise_not(mark, mark, Mat());imshow("分水岭变换", mark); -
对每个分割区域着色输出结果
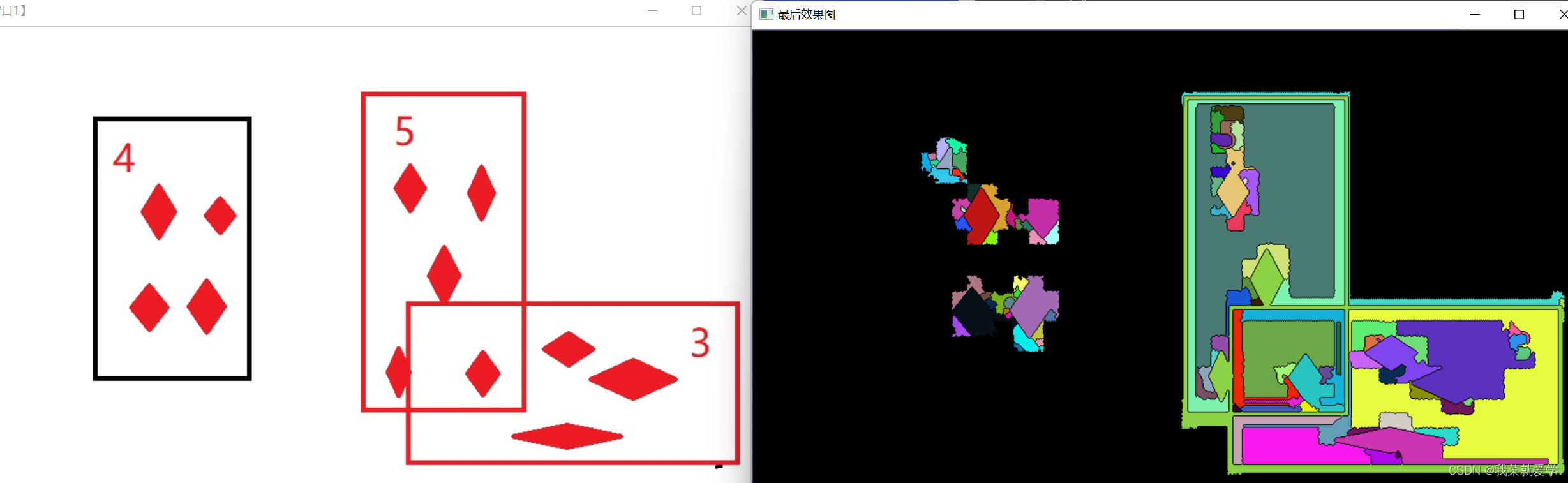
vector<Vec3b> colors;for (size_t i = 0; i <contours.size(); i++){int b = theRNG().uniform(0, 255);int g = theRNG().uniform(0, 255);int r = theRNG().uniform(0, 255);colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));}//双层循环,将分水岭图像遍历存入dst中Mat dst = Mat::zeros(markers.size(), CV_8UC3);for (int row = 0; row < markers.rows; row++)for (int col = 0; col < markers.cols; col++){int index = markers.at<int>(row, col);if (index > 0 && index <= static_cast<int>(contours.size()))dst.at<Vec3b>(row, col) = colors[index - 1];elsedst.at<Vec3b>(row, col) = Vec3b(0, 0, 0);}//混合灰度图和分水岭效果图并显示最终的窗口//dst = dst * 0.5 + grayImage * 0.5;imshow("最后效果图",dst);
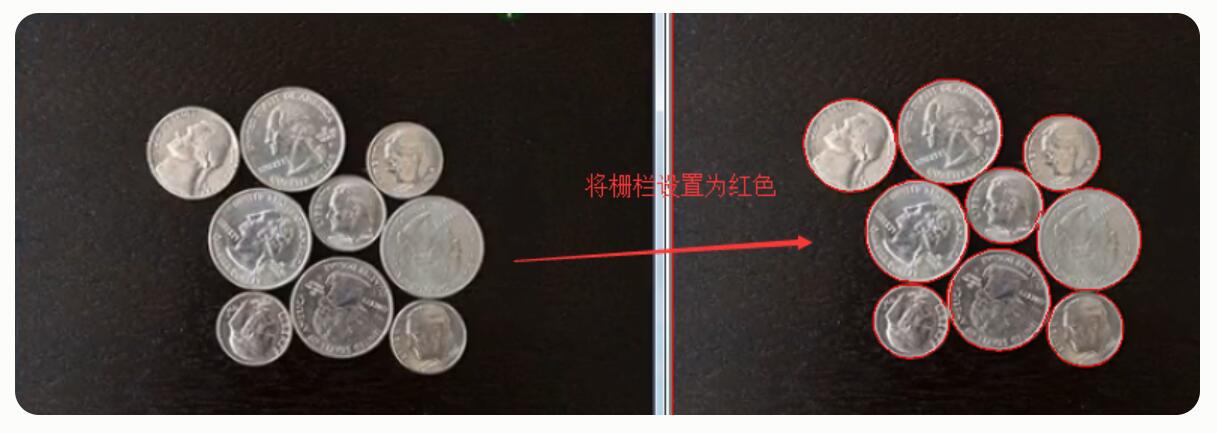
效果图:

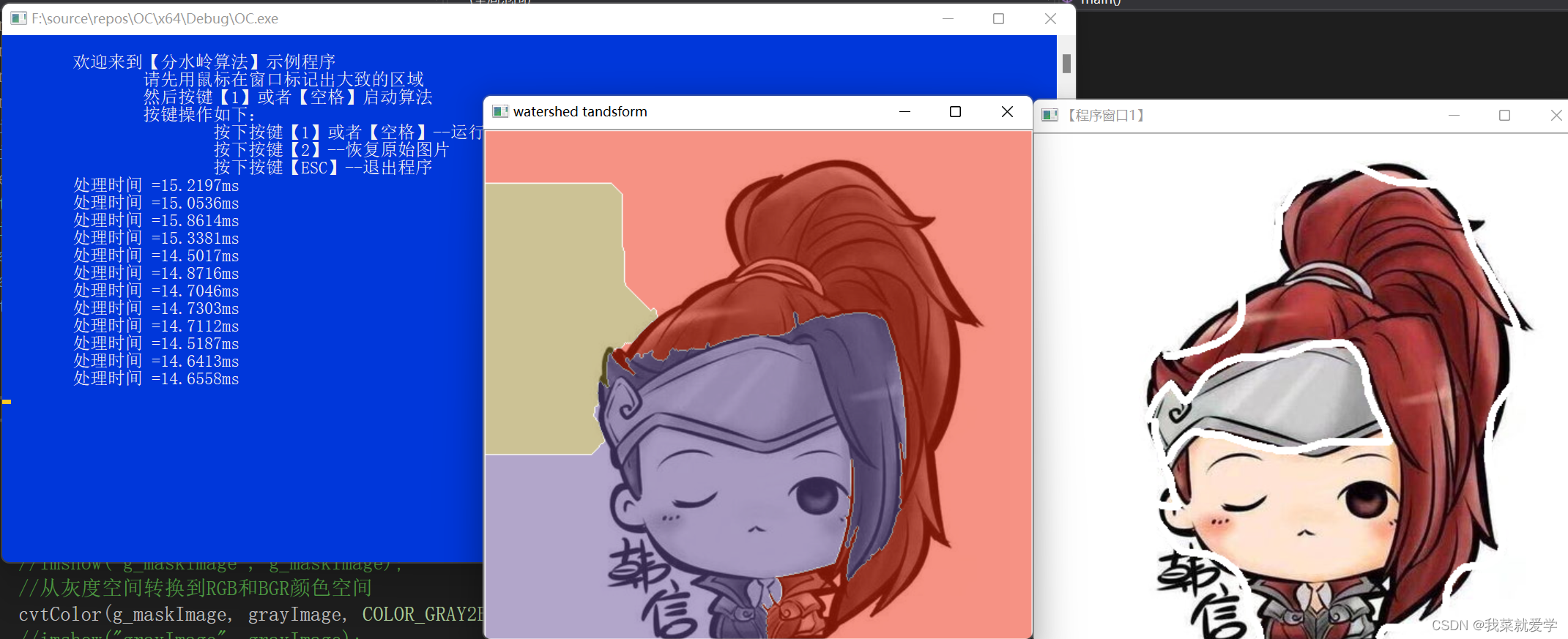
3、示例程序(书中)
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
using namespace std;
using namespace cv;
#define WINDOW_NAME "【程序窗口1】"
Mat g_maskImage, g_srcImage;
Point prevPt(-1, -1);
static void ShowHelpText();
static void on_Mouse(int event, int x, int y, int flags, void *);
int main()
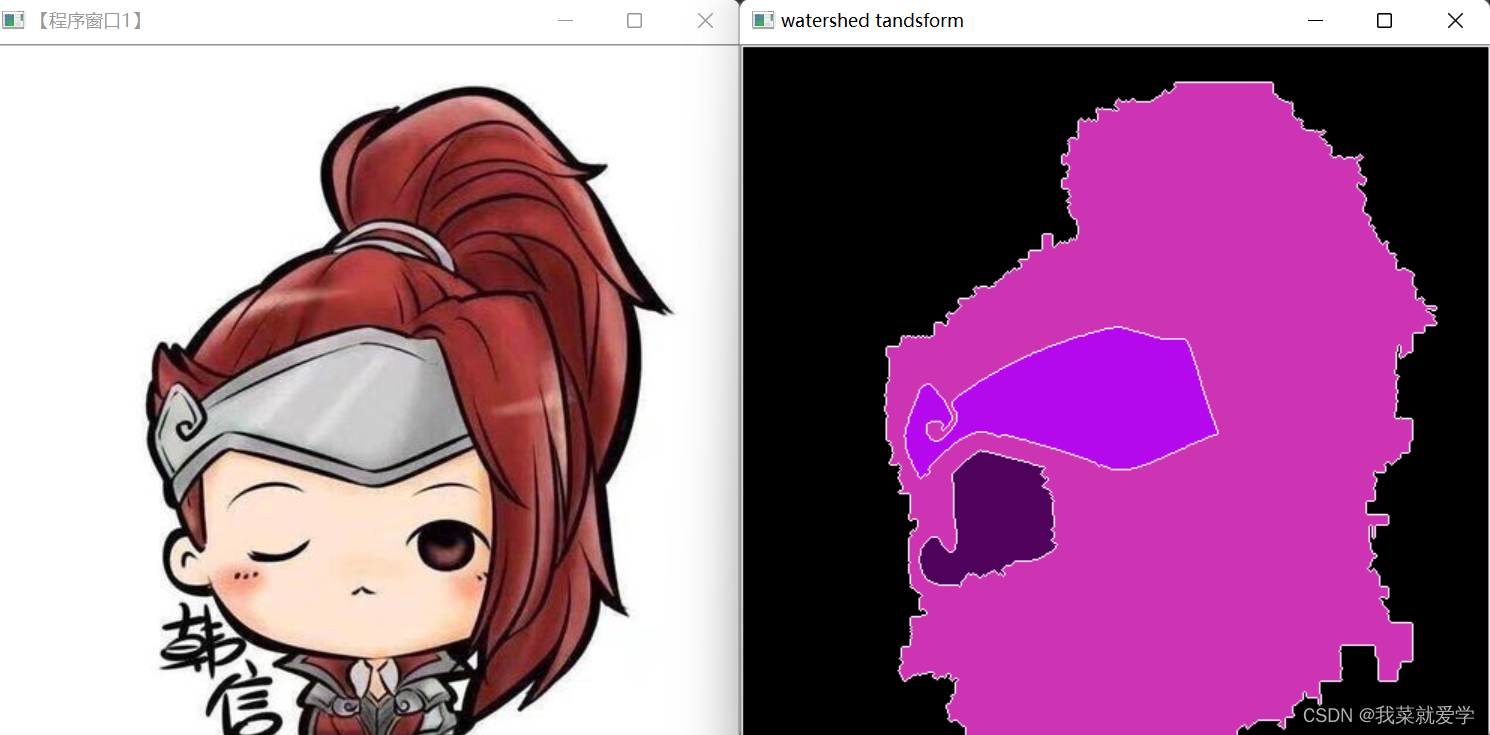
{system("color 1F");ShowHelpText();g_srcImage = imread("E://Pec//shan.jpg");imshow(WINDOW_NAME, g_srcImage);Mat srcImage, grayImage;g_srcImage.copyTo(srcImage);//从RBG和BGR颜色空间转换到灰度空间cvtColor(g_srcImage, g_maskImage, COLOR_BGR2GRAY);//imshow("g_maskImage", g_maskImage);//从灰度空间转换到RGB和BGR颜色空间cvtColor(g_maskImage, grayImage, COLOR_GRAY2BGR);//imshow("grayImage", grayImage);g_maskImage = Scalar::all(0);//设置鼠标回调函数setMouseCallback(WINDOW_NAME, on_Mouse, 0);while (1){int c = waitKey(0);if ((char)c == 27)break;//按键2按下时,恢复源图if ((char)c == 2){g_maskImage = Scalar::all(0);srcImage.copyTo(g_srcImage);imshow("image", g_srcImage);}//若检测到按键为1或者空格,则进行处理if ((char)c == '1' || (char)c == ' '){int i, j, compCount = 0;vector<vector<Point>>contours;vector<Vec4i>hierarchy;//寻找轮廓findContours(g_maskImage, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);//若是轮廓为空if (contours.empty())continue;//复制掩膜Mat maskImage(g_maskImage.size(), CV_32S);maskImage = Scalar::all(0);//循环绘制轮廓for (int index = 0; index >= 0; index = hierarchy[index][0], compCount++)drawContours(maskImage, contours, index, Scalar::all(compCount + 1), -1, 8, hierarchy, INT_MAX);//compCOunt为0时if (compCount == 0)continue;//生成随机颜色vector<Vec3b> colorTab;for (i = 0; i < compCount; i++){int b = theRNG().uniform(0, 255);int g = theRNG().uniform(0, 255);int r = theRNG().uniform(0, 255);colorTab.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r)); }//计算处理时间并输出到窗口double dTime = (double)getTickCount();watershed(srcImage, maskImage);dTime = (double)getTickCount() - dTime;printf("\t处理时间 =%gms\n", dTime*100. / getTickFrequency());//双层循环,将分水岭图像遍历存入watershedImage中Mat watershedImage(maskImage.size(), CV_8UC3);for(i=0;i<maskImage.rows;i++)for (j = 0; j < maskImage.cols; j++){int index = maskImage.at<int>(i, j);if (index == -1)watershedImage.at<Vec3b>(i, j) = Vec3b(255, 255, 255);else if (index <= 0 || index > compCount)watershedImage.at<Vec3b>(i, j) = Vec3b(0, 0, 0);elsewatershedImage.at<Vec3b>(i, j) = colorTab[index-1];}//混合灰度图和分水岭效果图并显示最终的窗口watershedImage = watershedImage * 0.5 + grayImage * 0.5;imshow("watershed tandsform", watershedImage);}}return 0;
}
static void on_Mouse(int event, int x, int y, int flags, void *)
{//处理鼠标步骤窗口中的情况if (x < 0 || x >= g_srcImage.cols || y < 0 || y >= g_srcImage.rows)return;//处理鼠标相关信息if (event == EVENT_LBUTTONUP || !(flags & EVENT_FLAG_LBUTTON))prevPt = Point(-1, -1);else if (event == EVENT_LBUTTONDOWN){prevPt = Point(x, y);}//鼠标左键按下并移动,绘制出白色线条else if (event == EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON)){Point pt(x, y);if (prevPt.x < 0)prevPt = pt;line(g_maskImage, prevPt, pt, Scalar::all(255), 5, 8, 0);line(g_srcImage, prevPt, pt, Scalar::all(255), 5, 8, 0);prevPt = pt;imshow(WINDOW_NAME, g_srcImage);}
}
static void ShowHelpText()
{cout << "\n\t欢迎来到【分水岭算法】示例程序" << endl;cout << "\t\t请先用鼠标在窗口标记出大致的区域" << endl;cout << "\t\t然后按键【1】或者【空格】启动算法" << endl;cout << "\t\t按键操作如下:" << endl;cout << "\t\t\t按下按键【1】或者【空格】--运行分水岭分割算法" << endl;cout << "\t\t\t按下按键【2】--恢复原始图片" << endl;cout << "\t\t\t按下按键【ESC】--退出程序" << endl;
}