目录
1. 前言
2. 关键定位技术评述
3. 基于定位场景的分类
4. 定位技术(系统)评价指标体系
5. 现有定位系统评述
6. 总结:挑战、基于和前进方向
1. 前言
本文是对以下论文的解读笔记。注意在下文中“该论文”和“本文”是指向不同的对象。文中着色高亮部分为一些有疑问的地方或者本文作者所加的解读comment,以及关于这个问题的一些思考。
王慧强等:高精度室内定位研究评述及未来演进展望, 通信学报 Vol.42 No.7 July.2021
论文摘要:如今,高精度室内定位服务因成为众多5G 重大应用场景的关键支撑而受到广泛关注,其实现技术、实现方案不断更新,且各具优缺点及特异性。因此,对高精度室内定位服务进行时效的、系统化的总结,并对其演进方向进行分析。首先,在总结已有的综述类文献的基础上,按定位技术、定位方案2 种不同维度对室内定位领域进行分类总结;其次,提出了基于定位场景的分类,指出了其中蕴含的“隐性要求”;再次,提出了定位系统评价指标体系并对现有高精度定位系统进行评估;最后,总结了高精度室内定位领域未来的演进方向,指出了网络一体化发展的趋势,提出了“在线即在位”等重要概念。
关键词:定位导航;室内定位;5G;一体化网络;定位技术。
本领域的相关工作。目前,高精度定位领域内已发表了大量综述类文献和一般性研究文献,但由于综述类文献具有一定的时效性,本文将关注重点放在近10 年相关领域发表的文献上,也包含少量发表时间稍长但行业认可度极高的文献。所有这些综述类文献,经论文作者查阅总结,其普遍存在以下不足:1) 未能将定位技术、定位方案和定位系统这3 个分类维度进行区分,往往一概而论;2) 未能面向未来网络演进的特性,分析不同技术、方法在网络一体化方面的表现;3) 评价定位技术的性能往往从单一的“定位精度”出发,未能顾全到适应性、实时性、成本、可用性、网络一体化程度等综合因素;4) 未能发现不同场景中对定位技术暗含的隐性要求;5) 未能从网络发展演进的维度对未来定位网络发展方向做出演进预测。
本文贡献在于:
- 本文对近年来认可度较高且具有代表性的文献以及定位系统进行分析评述。
- 本文从定位技术、定位方案2 个不同维度对近年来本领域研究热点进行分析评述。
- 本文提出了基于定位场景的分类方法,并指出了隐含于实际使用环境,极其重要却容易被忽视“隐性要求”。
- 本文提出了一种用于评估定位系统、定位技术的综合评价指标体系,并使用本指标体系,从适用性、定位精度、实时性、成本、覆盖范围、可用性以及网络融合一体化特性等方面对各类定位方法、技术以及系统进行评定分析。
- 本文指出了未来高精度定位领域高度一体化的发展方向,提出了“在线即在位”“全知网下隐私保护”等重要概念,指明了本领域的发展趋势、关键问题和未来愿景。
2. 关键定位技术评述
文中简要介绍了以下6种主流的定位技术:
- ToF/ToA
- TDoA
- RToF
- RSSI
- AoA
- FingerPrint
ToF/ToA、TDoA和RToF都是属于基于飞行时间(或者说测距类,因为在光速为恒定常数的条件下飞行时间和飞行距离是可以相互换算的)的这一大类,所以它们有一个共同的弱点就是要求视距(LOS)工作环境,NLOS环境下需要其它辅助技术。
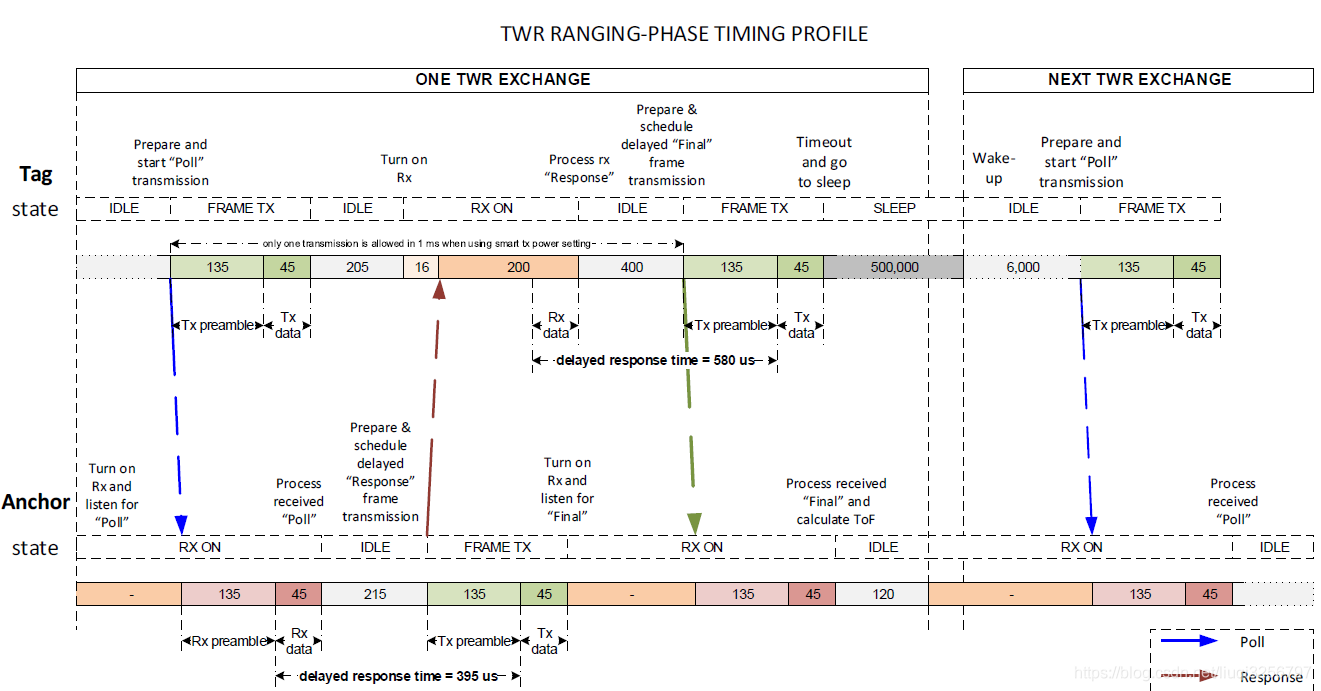
ToF/ToA是单向测距,因此要求发端和收端严格的时间同步,而这通常非常难以做到,即便能做到也可能代价巨大,所以一般实用系统中不会采用。RToF就是为了解决这个时钟同步问题而提出的解决方案。RToF(Round-Trip time of flight)意思是往返飞行时间,熟悉UWB的小伙伴会知道它也称为TWR(Two-way Ranging)或者TW-TOA,TWR有SS-TWR、DS-TWR、SDS-TWR等多种变种(有兴趣的小伙伴可以参考Decawave芯片的文档—Decawave已于去年被Qovro收购)。TWR技术由于需要双向通信,牺牲的是系统容量。TDoA是用另外一种方式来解决时钟同步问题,它只要求anchor(在别的语境下也有角基站的)之间保持时间同步(由于anchor通常是固定位置所以相对来说保持时钟同步可实现性更高一些)
(R)ToF(A)是技术也称为Trilateration技术,基于园相交方程求解;与之相对,TDoA也称为Multilateration技术,基于双曲线相交方程求解。此处不详述,有兴趣的小伙伴可参考[Ref1], [Ref2].
基于RSSI(接收信号强度指标)的定位方法是最简单“粗暴”的方法,本质上也是属于测距类技术所以也同样是要求视距(LOS)工作条件。它基于信号传输衰减与距离的确定关系的数学原理(基本来上说,传输衰减与距离呈平方反比关系),根据接收机检测到的信号强度来反推发射机与接收机之间的距离。是以上所有技术中的最简单的,但是自然其测距性能也非常差,只能用于对精度要求非常低的有限的场合,通常实用系统只会作为辅助信息来利用吧。
AoA(Arrival of Angle)是基于信号到达角度的定位方法,本质上是属于具有古老历史的三角定位(Triangulation)技术(参见Ref1)。实际应用中通常是基于多天线接收的到达信号的相位差来推算到达角度,由于衍生出PDoA技术(关于PDoA技术将另文介绍,此处暂且略过)。此方法优势在于精度较高,所需基站数量少,不需时钟同步。但AoA 测角需使用昂贵的阵列天线(现在UWB芯片集成了多天线接收能力已经成为主流了),信号解算计算复杂度高(这个是肯定,没有免费的午餐,但是芯片技术的发展使得这个问题慢慢地缓和了),难以支撑大容量、高并发的定位场景;此外,室内环境中多径效应严重,复杂的解相干算法(呃。。。不知道作者说的啥意思)进一步增加了计算复杂度。与ToA、TDoA一样AoA也同样是要求视距工作环境。
Fingerprint 定位方法,即基于信号指纹的定位方法,原理如图6 所示。此方法不需要解算(只需要查询匹配),其基本思想在于:离线定位阶段,事先标定待测区域的标记点并采集该点处的环境指纹信息,建立离线指纹库;在线定位阶段,通过实时获取待测点的环境信息并与离线指纹库中的数据项进行匹配,得到待测点的位置。

各种无线信号特征以及它们的任意都可以用作指纹信息。这种定位方法虽然简单,也不受LOS/NLOS环境的约束,但是有两个缺点或限制条件:(1) 需要事先通过实测创建指纹库—指纹库没有通用性,是每一个定位区域专用的,因此有相应的安装布设成本;(2)它要求环境是静态的,环境一变化(比如说环境中某件物品位置挪动了,或者有人走动等)指纹信息就变了,因为可能只适合于专用环境比如说某些工业环境吧。
以上所讨论的高精度定位技术谱系图如图7 所示。

不同定位方法的汇总对比表如下表所示:

3. 基于定位场景的分类
本论文把定位场景分为以下三类(这个分类总结有意思,精辟形象简单易懂)。
- WAI: Where Am I
- WAU: Where Are You
- WIH: Where Is He
WAI即“我”自己想知道自己在哪儿。发起定位诉求的主体和被测目标是统一的,被测目标与定位基础设施进行交互通信确定自己在哪儿。在民用室内定位与导航领域中,绝大部分主动定位的应用场景均属于此类,如大型商场或机场的个人定位服务、车位导航以及室内展馆路线指引等。像智慧工厂和仓储等场景中的机器人定位也属于此类。此类定位场景暗含的隐性要求为用户高度配合(即所谓的合作性定位)或主动定位,且具备较高计算能力。
WAU即“系统”想知道“你”在哪儿。发起定位诉求的主体和被测目标不一致,但是双方是合作性的,也属于合作性定位范畴,即定位操作需要被定位者的配合。应该是属于被动定位。除论文中指出的“此类应用环境大多包涵交互场景与通信场景,如好友寻路、虚拟现实/增强现实互动游戏等(感觉离高精度室内定位远了一些有点牵强^-^)”外,智慧工厂中人员和设备位置监测、灾害搜救等场景也属此类。此类定位场景暗含的隐性要求即为被定位用户高度配合、具备较高计算能力的支持以及网络兼具通信与定位功能(这个不一定,最简单如TDOA定位系统中的只有发射功能的Tag就可以了)。
WIH是指“TA在哪儿”,强调的是发起定位诉求是一方,提供定位功能的是一方,而被定位的是第三方。定位这件事本身是不为作为被定位目标的第三方知道的,即非合作性定位。监狱等场景的人员监控等属于此类。此类定位场景暗含的隐性要求即为用户零配合、无算力要求,但要求用户设备具备一定的隐蔽性并采用低功耗方案。
4. 定位技术(系统)评价指标体系
本论文中提出从以下几个维度来考察一个定位技术(系统)的评价指标。
- 适用性
- 定位精度
- 成本
- 实时性
- 覆盖范围、功耗与体积
- 可用性
- 网络一体化特性
这一分类方法是很恰当的。但是其中的附带描述都是定性的描述且仅代表论文作者的观点(有些描述不太认同^-^),这里就不一一展开,有兴趣者可以去阅读原论文。
5. 现有定位系统评述
论文中针对当前几种典型的定位系统进行了考察:
- 5G蜂窝网定位系统
- Wi-Fi指纹信息定位系统
- 共频带定位系统
- UWB定位系统
并针对各类定位系统的一些典型案例给出了基于上一章提出的7个评价指标的汇总对比表:

其中共频带定位系统也是属于5G定位系统的一个子类吧。DeepFi和Widar都是属于Wi-Fi定位技术,(虽然不太懂对WiFi的室内定位不了解)感觉WiFi这个东西再深怎么深挖它的定位功能不像是一条光明的路(上帝的归上帝恺撒的归恺撒,每种技术有它自己的天命和特长。发挥好特长就好,不一定非要去以己之短搏人之长)。
上表中“UWB-IP”是“WUB-IP”之误,此IP也非彼IP。它是WDMA-UWB Indoor Positioning(老实讲故意整一个让人如此容易误解的名字有标题党之嫌^-^)的缩写。这个不是现在大家所关注的基于IEEE802.15.4的标准的东西,如果你不是纯粹搞研究的应该可以忽略吧。
文中把Ubisense、BeSpoon(法国公司,已被恩智浦收购)和Decawave(爱尔兰公司,已被Qovro收购)作为并列项去谈其实是不太合适。Ubisense是设备方案供应商,BeSpoon和Decawave是芯片供应商,也许作者指的是用Ubisense的方案与基于后两者的芯片所开发出来的方案做对比?Decawave芯片是基于IEEE802.15.4a/4z标准的(对应于其中的HRP选项),BeSpoon的东西不太熟悉,应该也是IEEE802.15.4a/4z标准的(对应于其中的HRP选项)。而Ubisense的东西印象中是非标的,它应该只能闭环使用,不具备和其它厂家的设备的互联互通兼容性。
总的来说,这一章的内容更多的是“务虚”之谈,有一些价值,也有一些不一定妥当的地方。毕竟这么大的话题靠仅仅一两页想要哪怕给一个最精简的概述本身就是“Mission Impossible”。读者也要自行分辨,各取所需。
在论文的前面部分的“关键定位方案评述”一章中还提到了蓝牙,不知道为什么在对比中没有考虑基于蓝牙的定位方案。
6. 总结:挑战、基于和前进方向
面向未来,论文中提出4个方面的挑战、机遇和前进方向:
- 室内外联合定位——出入场景无缝切换。强调从用户体验的角度来说的室内室外无缝切换
- 5G 赋能传统定位技术——泛在融合定位。从技术要素的角度来看,强调未来定位网络应该是一个混合网络,多种技术互相配合协同作用,提供一个全覆盖的定位服务平台
- 高度一体化网络——在线即在位
- 网络安全保护新内涵——全知网下的个人位置隐私保护
最后两条过于高远。。。^-^
[Reference]
Ref1: What are Triangulation, Trilateration, and Multilateration?_chenxy_bwave的专栏-CSDN博客![]() https://blog.csdn.net/chenxy_bwave/article/details/119838775
https://blog.csdn.net/chenxy_bwave/article/details/119838775
Ref2: Trilateration and Least Square estimationhttps://blog.csdn.net/chenxy_bwave/article/details/119852486![]() https://blog.csdn.net/chenxy_bwave/article/details/119852486
https://blog.csdn.net/chenxy_bwave/article/details/119852486