在《学习OpenCV3,O'Reilly系列丛书》中的第11章常见的图像变换中讲到的“任意映射”,Remap函数。函数cv::remap通常用来纠正校准的立体图像,包括图像变形和图像扭曲。其实这个函数在无人机拍摄延时摄影(使用电子防抖算法)合成视频时也是常用到的函数。主要是处理无人机悬停或者行进中拍摄的照片出现比较大的形变。
remap( )函数解析
remap( )函数会根据我们指定的映射形式,将源图像进行重映射几何变换,基于的式子如下:
需要注意,此函数不支持就地(in-place)操作。看看其原型和参数。
| void cv::remap | ( | InputArray | src, |
| OutputArray | dst, | ||
| InputArray | map1, | ||
| InputArray | map2, | ||
| int | interpolation, | ||
| int | borderMode = BORDER_CONSTANT, | ||
| const Scalar & | borderValue = Scalar() | ||
| ) |
Parameters
| src | Source image. |
| dst | Destination image. It has the same size as map1 and the same type as src . |
| map1 | The first map of either (x,y) points or just x values having the type CV_16SC2 , CV_32FC1, or CV_32FC2. See convertMaps for details on converting a floating point representation to fixed-point for speed. |
| map2 | The second map of y values having the type CV_16UC1, CV_32FC1, or none (empty map if map1 is (x,y) points), respectively. |
| interpolation | 插值方式, Interpolation method (see InterpolationFlags). The method INTER_AREA is not supported by this function. |
| borderMode | 图像边界处理方式 Pixel extrapolation method (see BorderTypes). When borderMode=BORDER_TRANSPARENT, it means that the pixels in the destination image that corresponds to the "outliers" in the source image are not modified by the function. |
| borderValue | Value used in case of a constant border. By default, it is 0. |
使用OpenCV-3.4中的samples/cpp/tutorial_code/ImgTrans/Remap_Demo.cpp进行演示。
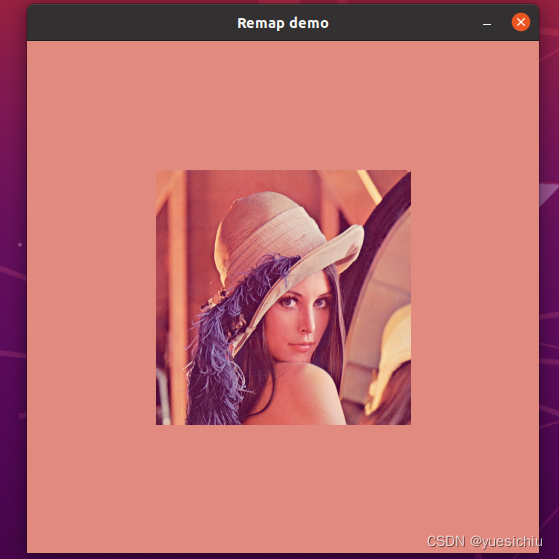
update_map函数中的参数ind意义:
ind=0表示提取源图像的25%~75%显示,1%~24%和76%~100%填充。
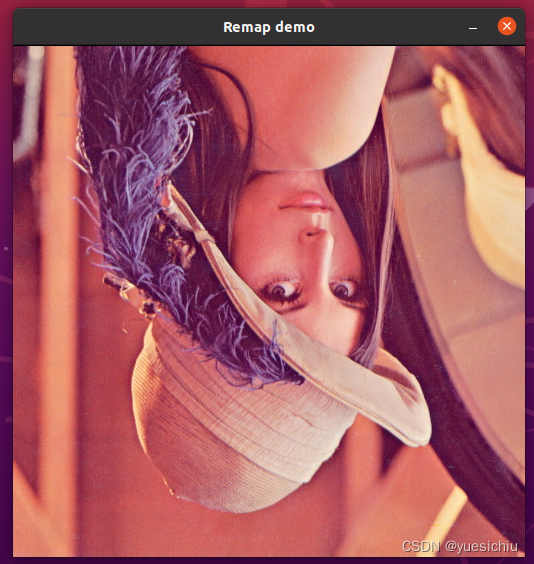
ind=1表示关于沿着x轴翻转(上下翻转)
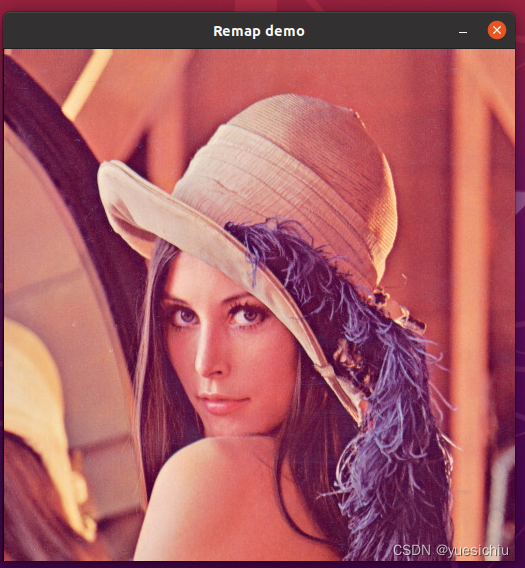
ind=2表示关于沿着Y轴翻转(左右翻转)
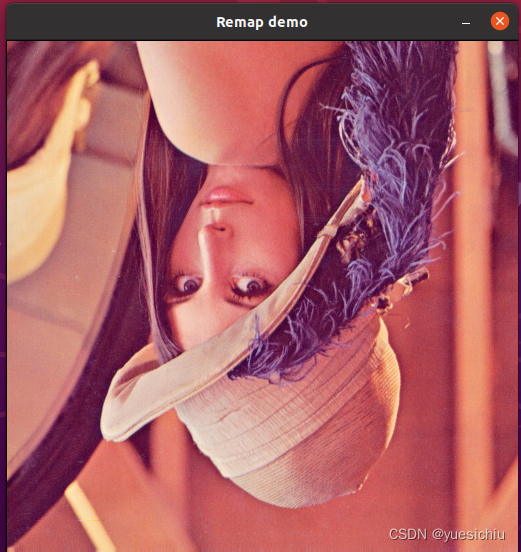
ind=3表是上下和左右同时翻转。
/*** @function Remap_Demo.cpp* @brief Demo code for Remap* @author Ana Huaman*/#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>using namespace cv;/// Function Headers
void update_map( int &ind, Mat &map_x, Mat &map_y );/*** @function main*/
int main(int argc, const char** argv)
{CommandLineParser parser(argc, argv, "{@image |chicky_512.png|input image name}");std::string filename = parser.get<std::string>(0);//! [Load]/// Load the imageMat src = imread( samples::findFile( filename ), IMREAD_COLOR );if (src.empty()){std::cout << "Cannot read image: " << filename << std::endl;return -1;}//! [Load]//! [Create]/// Create dst, map_x and map_y with the same size as src:Mat dst(src.size(), src.type());Mat map_x(src.size(), CV_32FC1);Mat map_y(src.size(), CV_32FC1);//! [Create]//! [Window]/// Create windowconst char* remap_window = "Remap demo";namedWindow( remap_window, WINDOW_AUTOSIZE );//! [Window]//! [Loop]/// Index to switch between the remap modesint ind = 0;for(;;){/// Update map_x & map_y. Then apply remapupdate_map(ind, map_x, map_y);remap( src, dst, map_x, map_y, INTER_LINEAR, BORDER_CONSTANT, Scalar(0, 0, 0) );/// Display resultsimshow( remap_window, dst );/// Each 1 sec. Press ESC to exit the programchar c = (char)waitKey( 1000 );if( c == 27 ){break;}}//! [Loop]return 0;
}/*** @function update_map* @brief Fill the map_x and map_y matrices with 4 types of mappings*/
//! [Update]void update_map( int &ind, Mat &map_x, Mat &map_y )
{for( int i = 0; i < map_x.rows; i++ ){for( int j = 0; j < map_x.cols; j++ ){switch( ind ){case 0:if( j > map_x.cols*0.25 && j < map_x.cols*0.75 && i > map_x.rows*0.25 && i < map_x.rows*0.75 ){map_x.at<float>(i, j) = 2*( j - map_x.cols*0.25f ) + 0.5f;map_y.at<float>(i, j) = 2*( i - map_x.rows*0.25f ) + 0.5f;}else{map_x.at<float>(i, j) = 0;map_y.at<float>(i, j) = 0;}break;case 1://行翻转map_x.at<float>(i, j) = (float)j;map_y.at<float>(i, j) = (float)(map_x.rows - i);break;case 2: //列翻转map_x.at<float>(i, j) = (float)(map_x.cols - j);map_y.at<float>(i, j) = (float)i;break;case 3: //上下左右均翻转map_x.at<float>(i, j) = (float)(map_x.cols - j);map_y.at<float>(i, j) = (float)(map_x.rows - i);break;default:break;} // end of switch}}ind = (ind+1) % 4;
}