目录
前言
1.PD、PSD、ND、NSD概念
2. Stable、asymptotic stability、Globalasymptotic stability
3.线性定常系统的稳定性分析
4. 滑模变结构的拉塞尔(Lasalle)不变性原理
5.比例积分滑模2自由度悬架仿真分析
前言
开始学习控制的时候觉得Lyapunov稳定性判定很普通,后来发现特别好用而且文章中稳定性判定使用频率很高,所以在这里作为学习笔记总结一下,主要是结合基本书上的知识进行汇总。
由于时间宝贵,并且书上的很详细,所以这里不自己敲打,只在最后做一些总结,这里直接黏贴图片来(仅作为学术交流使用,若侵权,马上删除,谢谢理解!)
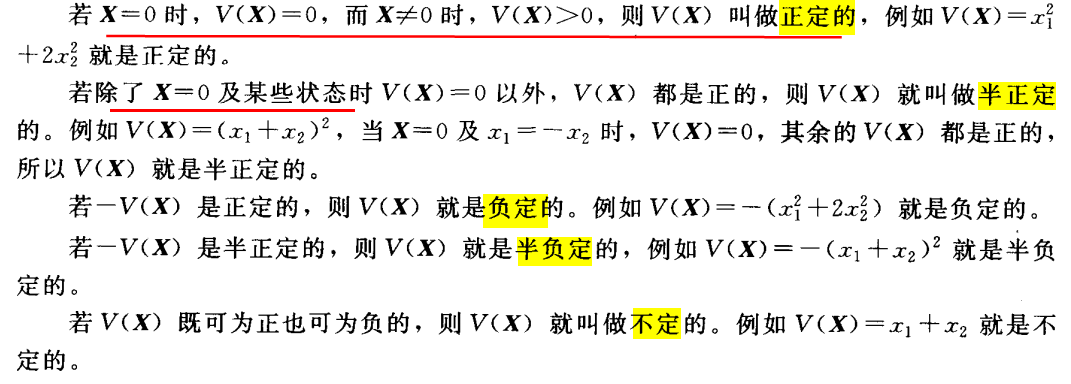
1.PD、PSD、ND、NSD概念
首先,我们常用的Lyapunov稳定性判据指的是Lyapunov直接法,也叫Lyapunov第二法。而对于正负定的概念是其判定的基本定义,所以非常有必要熟悉。
注:
①PD:positive definite 正定,其它同理
②正定VS半正定区别:正定只能在平衡点时才有V(x) = 0,而半正定除了平衡点有V(x) = 0还有其他点。
③因为任何平衡点都可以通过坐标转换到0点,所以这里后面统一是讨论0点的稳定性。
④对于常见的二次型标量Lyapunov函数V(x) = x'*P*x正定的充要条件是 P > 0,即可通过西尔维斯特准则(Sylvester):P的顺序主子式 > 0来快速判定。
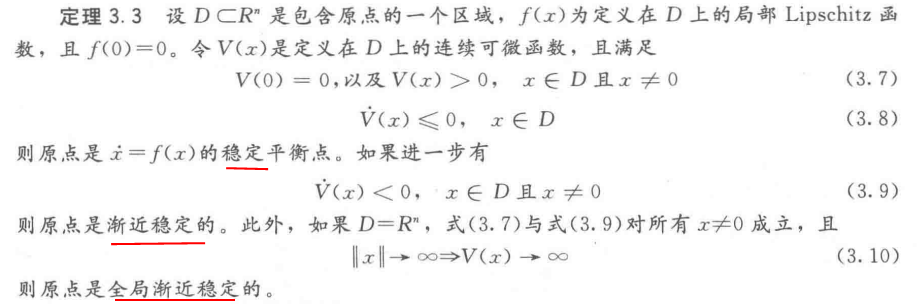
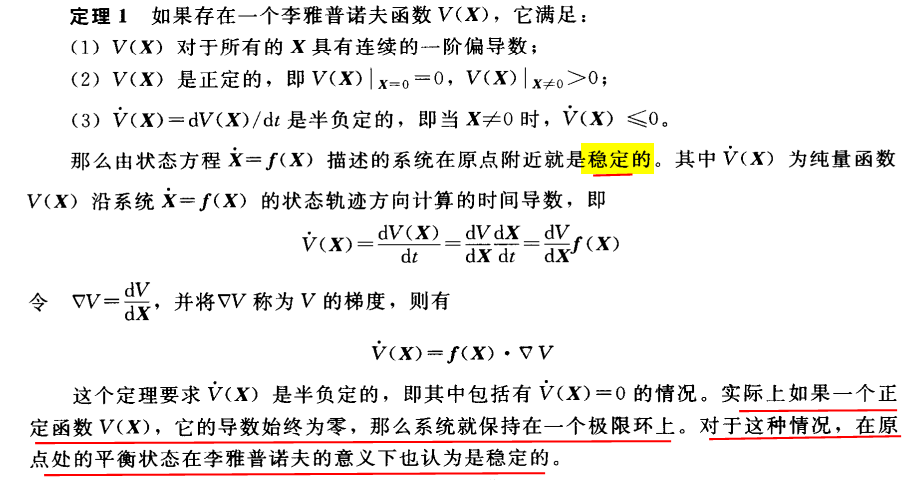
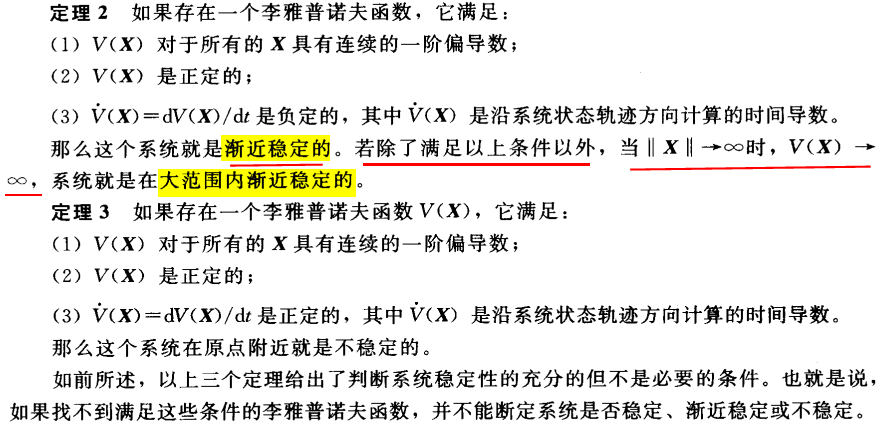
2. Stable、asymptotic stability、Globalasymptotic stability
对于一个系统的稳定有三种情形:稳定的、渐进稳定的、全局渐进稳定的(或者说大范围渐近稳定),这里给出两本书中的定义,其实都是一样的意思。
[1] Khalil H K . [Khalil] - Nonlinear Systems.pdf. 2002.
[2]张孝祖. 车辆控制理论基础及应用[M]. 化学工业出版社, 2007.
注:
①Lyapunov稳定性判据是充分条件,也就是说如果找不到这样的函数,不能说明系统是不稳定的。
②对于常见的Lyapunov函数是用能量或者误差二次型标量函数去定义,常见的滑模控制使用V = 1/2s^2,其中s是滑模面,因为我们希望系统落在滑模面,而1/2是系统,方便证明V' ≤ 0时使用;如果对于参数不定的系统在研究滑模不变性,还需要定义估计不确定项f^与标称项f的误差f~,即定义V = 1/2s^2+1/2(f~)^2
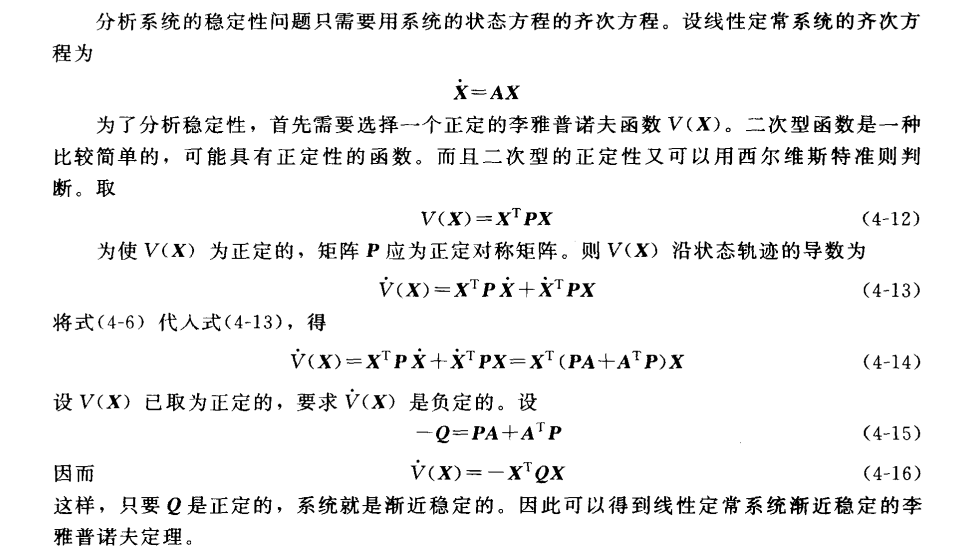
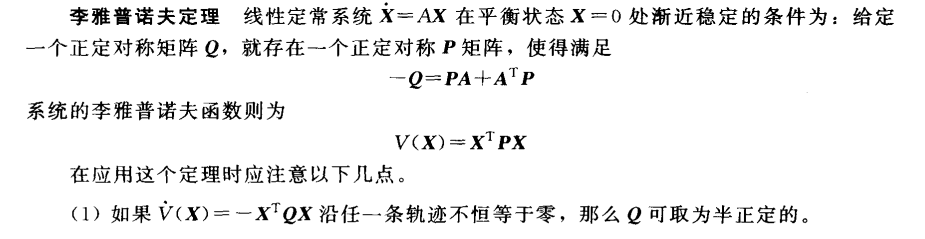
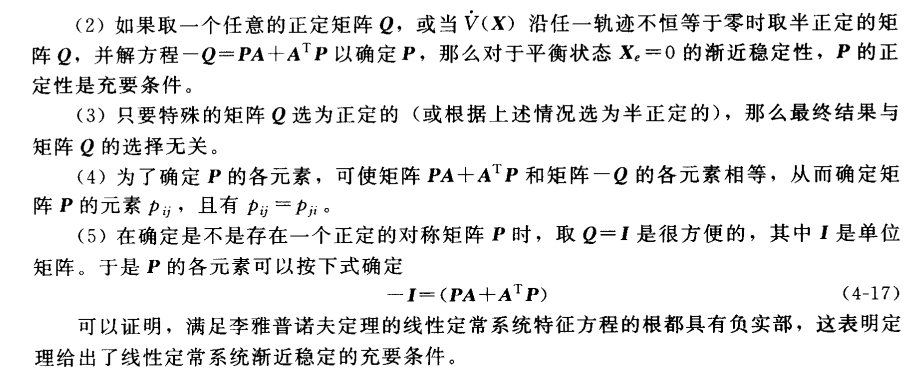
3.线性定常系统的稳定性分析
对于Lyapunov函数的寻找方法没有固定的形式,但是对于线性定常系统有一种固定寻找V(x)的方法:
这里推荐B站的DR_CAN 视频,很详细:
【Advanced控制理论】6_稳定性_李雅普诺夫_Lyapunov_哔哩哔哩_bilibili
【Advanced控制理论】12_非线性理论基础_Lyapunov直接方法_哔哩哔哩_bilibili
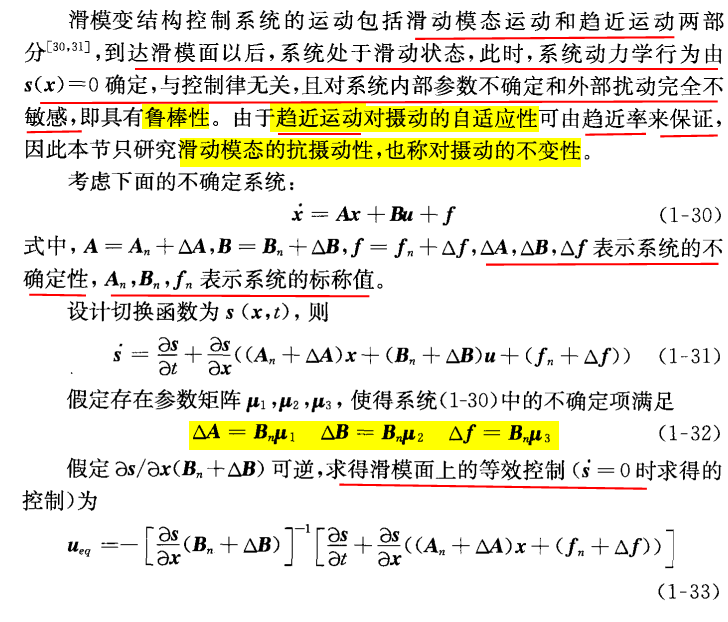
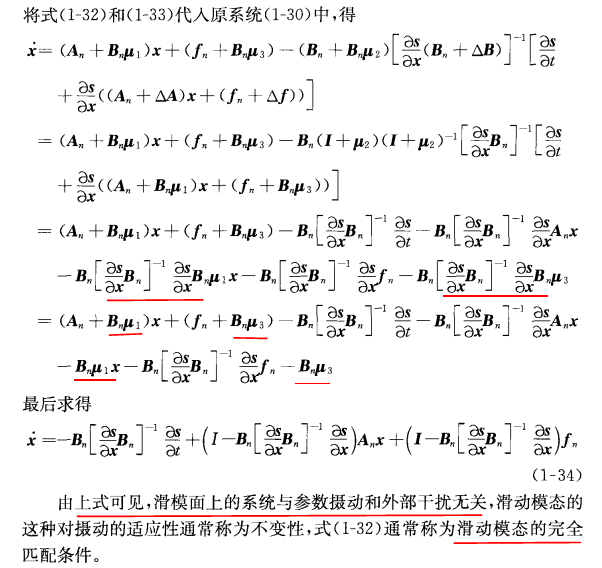
4. 滑模变结构的拉塞尔(Lasalle)不变性原理
[3]张袅娜. 终端滑模控制理论及应用[M]. 科学出版社, 2011.
5.比例积分滑模2自由度悬架仿真分析
未完待续......
如果有帮助,麻烦帮忙点个赞是我最大的分享动力,非常感谢!
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!
参考资料:
[1] Khalil H K . [Khalil] - Nonlinear Systems.pdf. 2002.
[2]张孝祖. 车辆控制理论基础及应用[M]. 化学工业出版社, 2007.
[3]张袅娜. 终端滑模控制理论及应用[M]. 科学出版社, 2011.