前言
无
一、角点是神马?
角点被定义为图像边缘曲线上曲率极大值的点或图像亮度变化剧烈的点 ,这些点既保留了图像的重要特征,又有效地减少了信息的数据量。
二、Harris角点检测算法原理
Harris算法以 Morave算法为基础,如果某一点朝任一方向发生小小的偏移都能引起灰度的较大变化 ,那么就认为该点是角点.简单易学的解释,但想要详细了解Harris算法可查看我推荐的博文。
图像特征之Harris角点检测_skycrygg的博客-CSDN博客_harris角点检测
步骤
1.计算x y 方向的梯度值Mat_x,Mat_y
代码如下(示例):
//Step1//1.1 创建x与y方向内核Mat xKernel = (Mat_<double>(1, 3) << -1, 0, 1);//[-1,0,1] x方向Mat yKernel = xKernel.t();//反转矩阵。 该方法通过矩阵表达式进行矩阵求逆。//Mat yKernel = (Mat_<double>(3, 1) << -1, 0, 1);//[-1// 0// 1] y方向//1.2卷积获取x与y方向的梯度值Mat Ix, Iy;filter2D(gray, Ix, CV_64F, xKernel);filter2D(gray, Iy, CV_64F, yKernel);
2.计算Mat_xx,Mat_yy,Mat_xy
代码如下(示例):
//Step2//计算Mat_xx,Mat_yy,Mat_xyMat Ix2, Iy2, Ixy;Ix2 = Ix.mul(Ix);// 执行两个矩阵按元素相乘 获取Mat_xx。Iy2 = Iy.mul(Iy);// 执行两个矩阵按元素相乘 获取Mat_yy。Ixy = Ix.mul(Iy);// 执行两个矩阵按元素相乘 获取Mat_xy。
3.利用高斯函数对Mat_xx,Mat_yy,Mat_xy进行滤波
代码如下(示例):
//Step3//3.1获取高斯滤波内核Mat gaussKernel = getGaussianKernel(7,1);//3.2利用高斯函数对Mat_xx,Mat_yy,Mat_xy进行滤波filter2D(Ix2, Ix2, CV_64F, gaussKernel);filter2D(Iy2, Iy2, CV_64F, gaussKernel);filter2D(Ixy, Ixy, CV_64F, gaussKernel);4.计算局部特征结果矩阵M的特征值和响应函数
代码如下(示例):
//Step4//计算局部特征结果矩阵M的特征值和响应函数//C(i,j) = Det(M) - k(trace(M)^2) k∈(0.04,0.06]Mat cornerStrength(gray.size(),CV_64F);int width = gray.size().width;int height = gray.size().height;for (int h = 0; h < height; h++){for (int w = 0; w < width; w++){//M = [Ix2,Ixy// Ixy,Iy2]//det = Ix2 * Ix2 - Ixy^2//trace = Ix2 + Iy2//C = det - k * tracedouble det_m = Ix2.at<double>(h, w) * Iy2.at<double>(h, w) - pow(Ixy.at<double>(h, w), 2);double trace_m = Ix2.at<double>(h, w) + Iy2.at<double>(h, w);cornerStrength.at<double>(h, w) = det_m - k * trace_m * trace_m;}}5.将计算完的响应函数的值C进行非极大值抑制,滤除边缘与非角点的点,保留满足大于设定的阈值的区域
代码如下(示例):
//Step5//5.1寻找最大值double maxStrength;minMaxLoc(cornerStrength,NULL,&maxStrength,NULL,NULL);//5.2非极大值抑制Mat dilated;dilate(cornerStrength,dilated,Mat());Mat localMax;compare(cornerStrength,dilated,localMax,CMP_EQ);//5.3保留满足大于设定的阈值Mat cornerMap;double qualityLevel = 0.01;double thresh = qualityLevel * maxStrength;cornerMap = cornerStrength > thresh;// 大于标识符重载函数// 等同于threshold(cornerStrength,cornerMap,thresh,255,THRESH_BINARY)bitwise_and(cornerMap,localMax,cornerMap);6.找出角点
代码如下(示例):
// Iterate over the pixels to obtain all feature points 迭代像素以获得所有特征点for (int y = 0; y < cornerMap.rows; y++) {const uchar* rowPtr = cornerMap.ptr<uchar>(y); //行指针for (int x = 0; x < cornerMap.cols; x++) {// if it is a feature point 如果是特征点(像素值非0值为特征点)if (rowPtr[x]) {points.push_back(cv::Point(x, y));}}}
三、Harris角点算法的实现(完整版)
//算法原理步骤
//1.计算x y 方向的梯度值Mat_x,Mat_y
//2.计算Mat_xx,Mat_yy,Mat_xy
//3.利用高斯函数对Mat_xx,Mat_yy,Mat_xy进行滤波
//4.计算局部特征结果矩阵M的特征值和响应函数
//C(i,j) = Det(M) - k(trace(M)^2) k∈(0.04,0.06]
//5.将计算完的响应函数的值C进行非极大值抑制,滤除边缘与非角点的点,保留满足大于设定的阈值的区域
//6.找出角点void myDetecHarrisCornerAlgorithm(const Mat& src, vector<cv::Point> &points, double k)
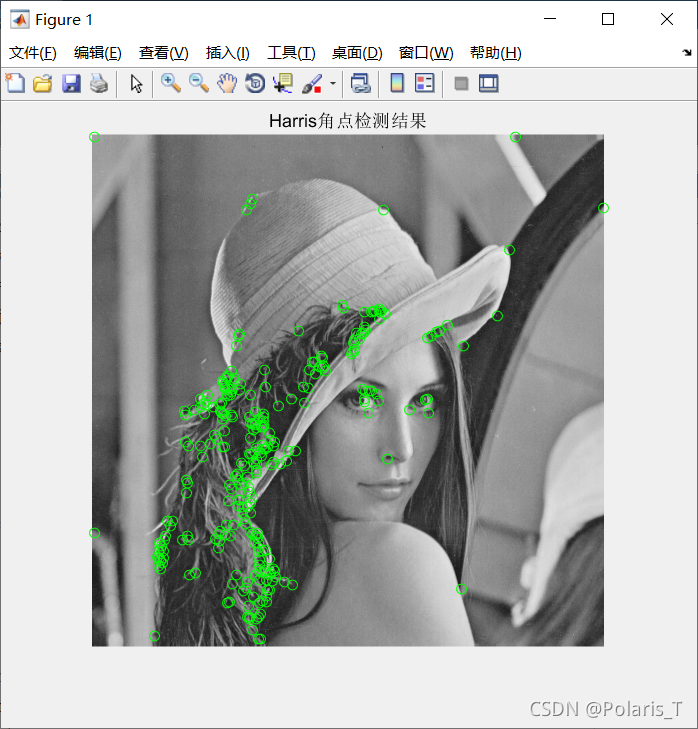
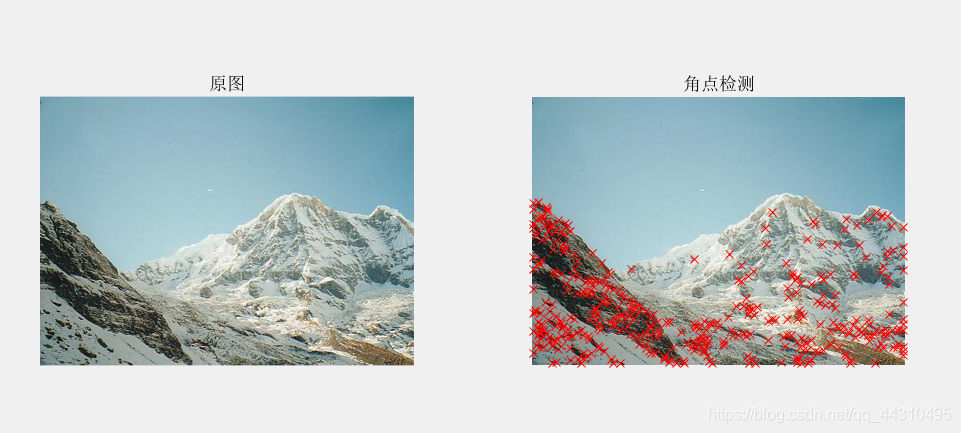
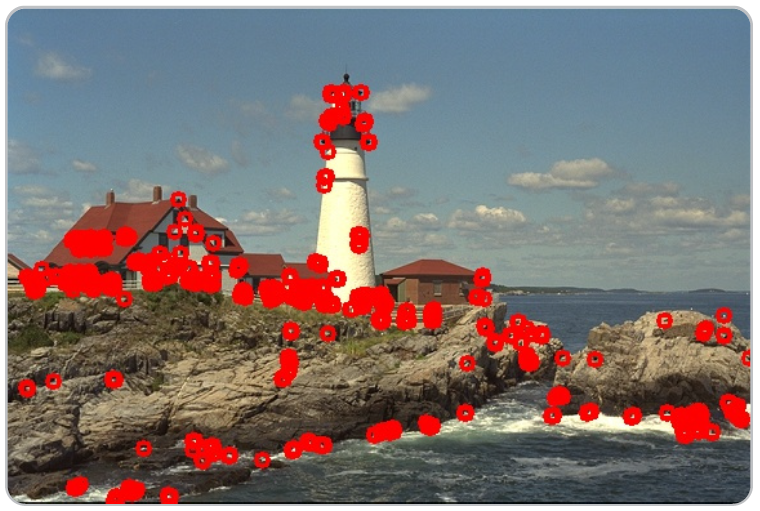
{Mat gray;if (src.channels() == 3){cvtColor(src, gray, COLOR_BGR2GRAY);}else if (src.channels() == 1){gray = src.clone();}else{cout << "Image channnels is Error! " << endl;return ;}gray.convertTo(gray,CV_64F);//Step1//1.1 创建x与y方向内核Mat xKernel = (Mat_<double>(1, 3) << -1, 0, 1);//[-1,0,1] x方向Mat yKernel = xKernel.t();//反转矩阵。 该方法通过矩阵表达式进行矩阵求逆。//Mat yKernel = (Mat_<double>(3, 1) << -1, 0, 1);//[-1// 0// 1] y方向//1.2卷积获取x与y方向的梯度值Mat Ix, Iy;filter2D(gray, Ix, CV_64F, xKernel);filter2D(gray, Iy, CV_64F, yKernel);//Step2//计算Mat_xx,Mat_yy,Mat_xyMat Ix2, Iy2, Ixy;Ix2 = Ix.mul(Ix);// 执行两个矩阵按元素相乘 获取Mat_xx。Iy2 = Iy.mul(Iy);// 执行两个矩阵按元素相乘 获取Mat_yy。Ixy = Ix.mul(Iy);// 执行两个矩阵按元素相乘 获取Mat_xy。//Step3//3.1获取高斯滤波内核Mat gaussKernel = getGaussianKernel(7,1);//3.2利用高斯函数对Mat_xx,Mat_yy,Mat_xy进行滤波filter2D(Ix2, Ix2, CV_64F, gaussKernel);filter2D(Iy2, Iy2, CV_64F, gaussKernel);filter2D(Ixy, Ixy, CV_64F, gaussKernel);//Step4//计算局部特征结果矩阵M的特征值和响应函数//C(i,j) = Det(M) - k(trace(M)^2) k∈(0.04,0.06]Mat cornerStrength(gray.size(),CV_64F);int width = gray.size().width;int height = gray.size().height;for (int h = 0; h < height; h++){for (int w = 0; w < width; w++){//M = [Ix2,Ixy// Ixy,Iy2]//det = Ix2 * Ix2 - Ixy^2//trace = Ix2 + Iy2//C = det - k * tracedouble det_m = Ix2.at<double>(h, w) * Iy2.at<double>(h, w) - pow(Ixy.at<double>(h, w), 2);double trace_m = Ix2.at<double>(h, w) + Iy2.at<double>(h, w);cornerStrength.at<double>(h, w) = det_m - k * trace_m * trace_m;}}//Step5//5.1寻找最大值double maxStrength;minMaxLoc(cornerStrength,NULL,&maxStrength,NULL,NULL);//5.2非极大值抑制Mat dilated;dilate(cornerStrength,dilated,Mat());Mat localMax;compare(cornerStrength,dilated,localMax,CMP_EQ);//5.3保留满足大于设定的阈值Mat cornerMap;double qualityLevel = 0.01;double thresh = qualityLevel * maxStrength;cornerMap = cornerStrength > thresh;// 大于标识符重载函数// 等同于threshold(cornerStrength,cornerMap,thresh,255,THRESH_BINARY)bitwise_and(cornerMap,localMax,cornerMap);//Step6// Iterate over the pixels to obtain all feature points 迭代像素以获得所有特征点for (int y = 0; y < cornerMap.rows; y++) {const uchar* rowPtr = cornerMap.ptr<uchar>(y); //行指针for (int x = 0; x < cornerMap.cols; x++) {// if it is a feature point 如果是特征点(像素值非0值为特征点)if (rowPtr[x]) {points.push_back(cv::Point(x, y));}}}}四.角点检测效果


总结
无