相机标定的目的:
相机标定的目的有两个,一个就是矫正由于镜头畸变造成的图片的变形,例如,现实中的直线,拍摄成图像后会外凸或内凹,进行相机标定后可以对这种情况进行校正;另一个是根据获得得图像重构三维场景,因为标定的过程就是通过一系列的三维点和它对应的二维图像点进行数学变换,求出相机的内参数和外参数。
总的来说就是,就是通过寻找对象和现实世界的数学转换关系,并***找出其定量的联系,从而实现从图像中测量出实际数据。***
相机标定涉及到四个坐标系分别是,世界坐标系,摄像机坐标系,图像物理坐标系和图像像素坐标系。其中世界坐标系到摄像机坐标系,摄像机坐标系到图像物理坐标系,图像物理坐标系到像素坐标系存在变换关系。
图像物理坐标系——像素坐标系

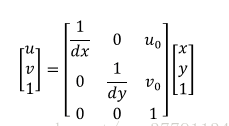
图像中,O0是像素坐标系原点,在左上角,与数字图像的像素坐标相同,O1为图像物理坐标系原点,是相机光轴与图像平面的交点。假设dx,dy是每个像素在X,Y方向上的宽度,则图像中每个像素点在图像物理坐标系和图像像素坐标系中存在如下关系:
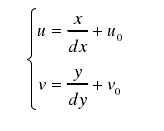
其中u0,v0是坐标系(x,y)的原点在像素坐标系中的坐标。将上式转为矩阵相乘形式
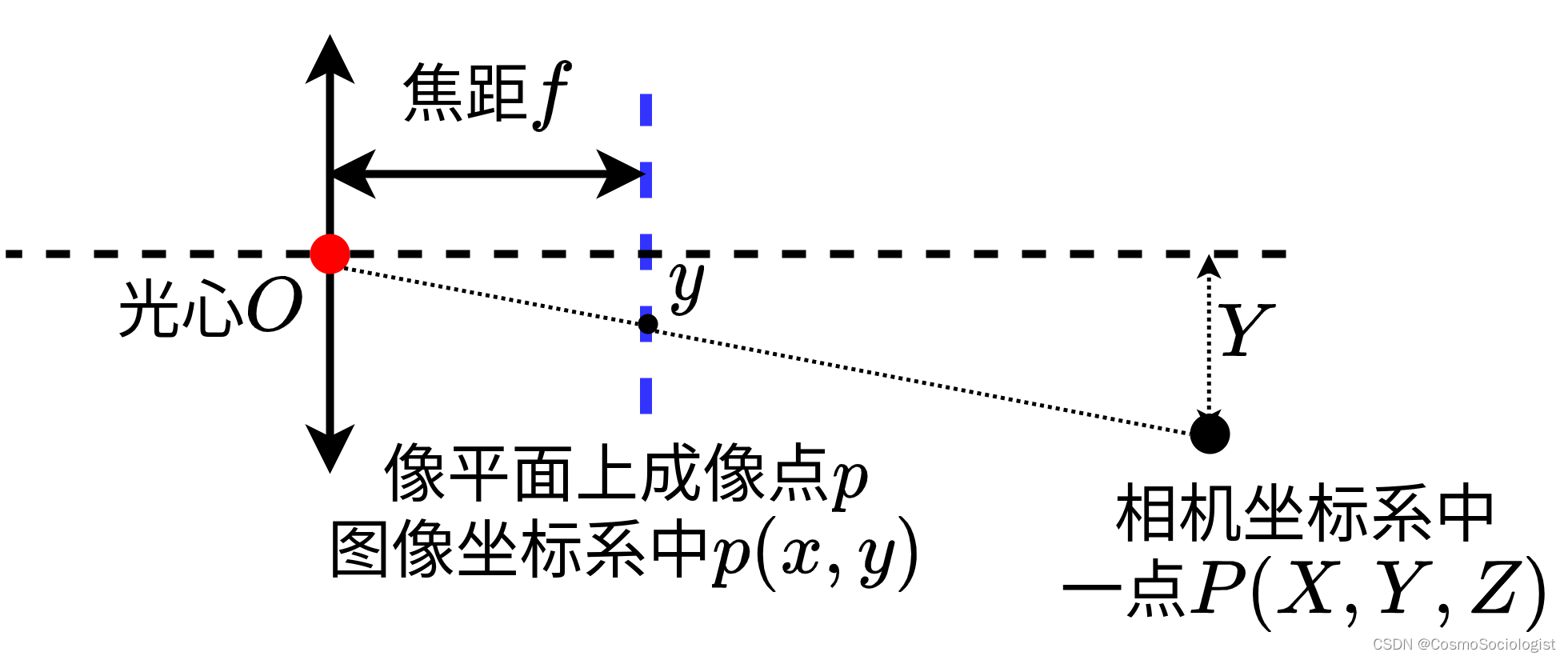
相机坐标系——图像物理坐标系
这两个坐标系之间的转换可以看下图,f表示相机焦距,xy平面表示像平面,OcZc表示相机光轴。利用三角形相似,可以求得图像物理坐标系点和相机坐标系之间的关系。

世界坐标系——相机坐标系
从世界坐标系变换到相机坐标系属于刚体变换,即物体不会发生形变,只需要对坐标系进行旋转和平移,即可进行变换。
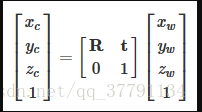
这是两坐标系的转换方程,其中R代表的是一个33的正交单位矩阵,表示坐标系的旋转,T为31的矩阵,表示坐标系的平移。0 = 【0,0,0】



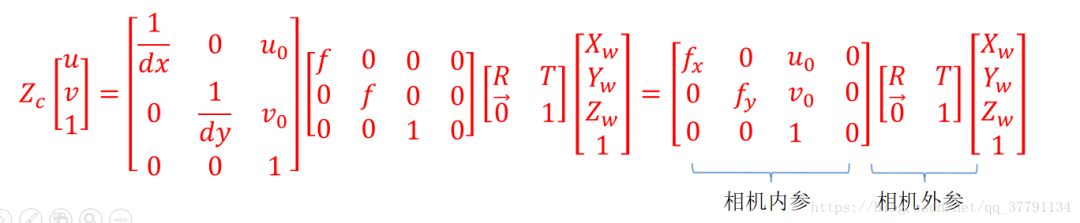
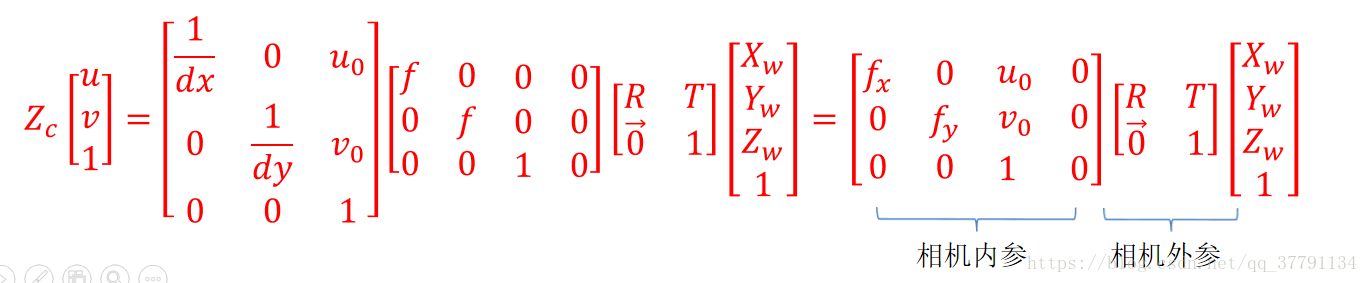
将以上三个矩阵关系,进行带入,可以得到
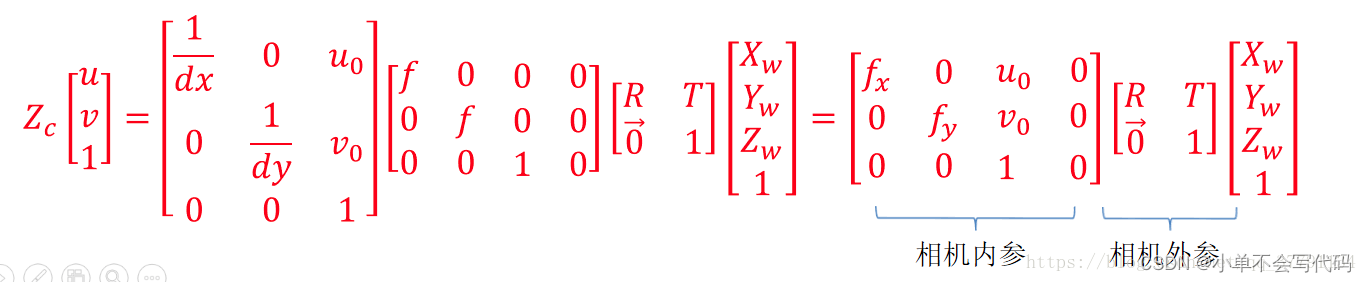
fx = f/dx,fy = f/dy 四个坐标系中,除了图像坐标系单位是 像素 外,其他坐标系单位均为mm。
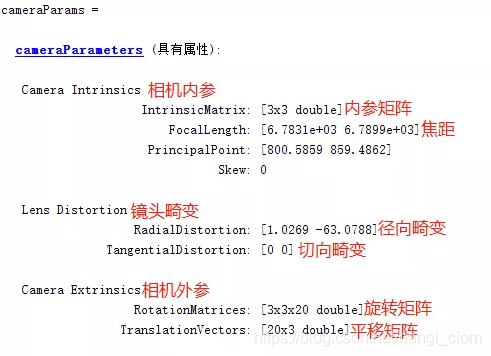
外参矩阵:告诉现实世界点(世界坐标系)是怎么经过旋转平移,然后落到另一个现实世界点(摄像机坐标系)上。
内参数矩阵:告诉上述点在1的基础上,是如何经过摄像机的镜头,通过针孔成像和电子转化为像素点。
畸变矩阵:告诉为什么没有落在理论位置上,还产生了一点偏差(便宜和变形)。
本文是自己最近学习相机标定的总结整理。
本文参考文档:https://blog.csdn.net/baidu_38172402/article/details/81949447