无刷直流电机的PWM调制方式介绍
标签: 无刷直流电机pwm调制方式bldc驱动方案 | |
引言
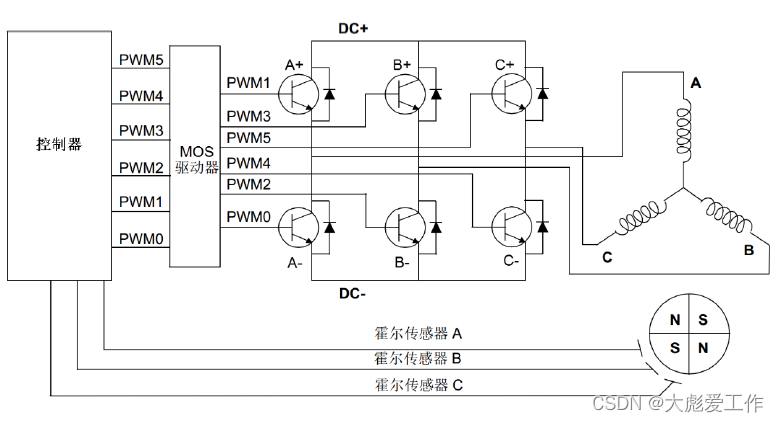
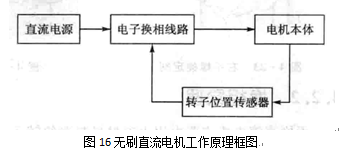
BLDC(Brushless Direct Current)无刷直流电机已在家用电器、汽车、医疗、工业设备等领域被广泛使用,三相无刷直流电机是更主流产品。图1为三相无刷直流电机的驱动部分示意图,主要包括霍尔信息的采集,以及根据霍尔信号对三相逆变器做对应的调制,三相逆变器PWM的开关顺序已经PWM的占空比是调制的主要内容,不同的调制方式对BLDC的运行性能有很大影响,近年来随着电机控制系统越来越精细,在原来常见的方波120度脉宽调制基础上,正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)出现,使电机脉动降低、电流波形畸变减小,但后两者的算法比较复杂,本文将对三种调制方式逐一地介绍其特性、原理及计算细节。安森美半导体LC08000M芯片集成这三种调制方式,适合应用在BLDC的驱动。

图1:三相无刷直流电机驱动示意图
1. 方波120度脉宽调制
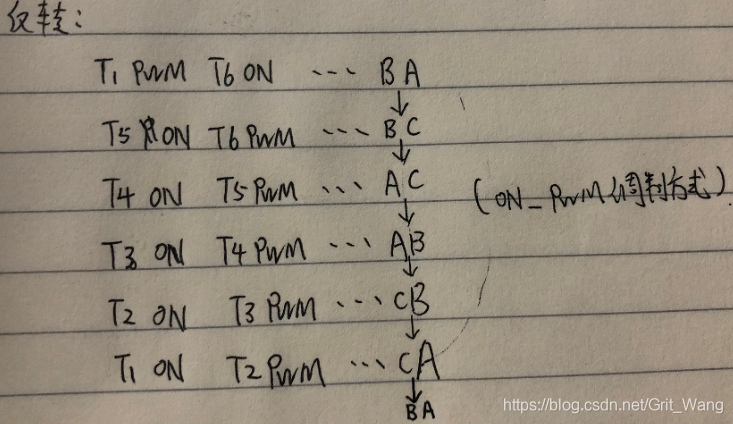
利用霍尔值(每个电气周期6次变化),改变UVW相电流流向,但同一霍尔值内电流流向不变,任何时刻只能一相的上桥和另一相的下桥导通,这种控制方式简单,但存在最大60度的转矩偏角,效率降低,同时会伴有转动噪音。

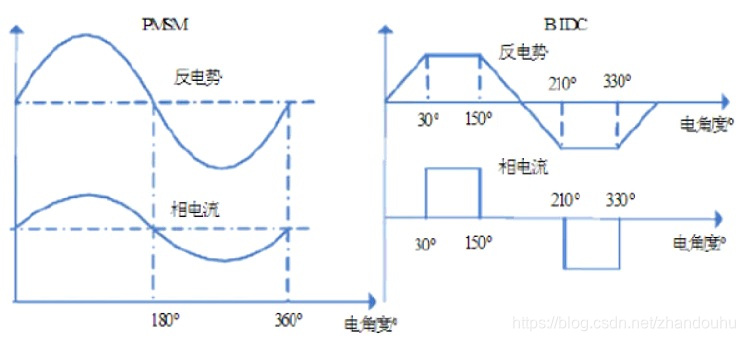
图: Hall状态与PWM、三相反电动势、三相电流的对应关系
在上桥下桥PWM开关控制顺序不同,我们可以做出下面5种模式的选装。

LC08000M为了减小在换相时转矩的波动,采用了PWM值过渡方式,这一处理能有效降低了转动噪音。

图3:LC08000M 方波120°脉宽调制的PWM与霍尔关系的对应图

图4:实测LC08000M方波120度脉宽调制的效果
2. 正弦脉宽调制(SPWM)
叠加在MOS管的直流电压可以通过PWM开关控制来等效成正弦电压,由于中性点为0,因此电机的相电压也为正弦,从而使得电机相线电流也成正弦变化规则,消除了转矩波动。根据面积等效原理,正弦波还可以等效成PWM波。如图5所示,通过这种方式我们不停的调整PWM的占空比来实现正弦电压效应。

图5:正弦波与PWM波的等效图
正弦脉宽调制需要知道ωt的详细值,而我们从$霍尔元件只可以读取到60°120°180°240°360°这个6个大体的位置信息,所以我们需要从前几次霍尔值变化的间隔时间推算出60度内的内角度。在电机静启动情况下,我们无法推算出内角度信息,因此启动情况下,我们还是要采用方波120度脉宽调制方式启动,但电机得到一个稳定转动后,我们可以推算出内角度,就可以切换成正弦脉宽调制方式。
推算内角度方法:如图6-1首先计算出每个60°需要的时间,除以PWM周期的时间可以计算出60°内PWM的次数,从而得到60°内每增加1个PWM时内角度增加的值,在加上通过霍尔值对应的大角度值就得到当前的角度;UVW三相彼此相差120°相位。

图6-1
举例:PWM基本周期频率20KHz(50μs),8极对电机,在转速2000r/m时,求角度变化值
1) 2000r/m*8 = 16000hall/m (每分钟的霍尔电气周期)
2)16000/60 = 266.67hall/s (每秒的霍尔电气周期)
3)1/266.67 = 3.75ms (每个霍尔周期需要的时间)
4)3.75ms/6 = 625μs (每60度需要的时间)
5)625μs/50μs = 12.5次 (每60度内PWM周期的次数)
6)60°/12.5=4.8° (每个PWM周期增加的角度值)

图6-2
然后通过查询代码中内置的sin函数值,在叠加上力矩输出要求的百分比,这样我们可以在每次PWM周期结束后立即修改PWM的占空比,使其得到正弦脉宽调制方式。
LC08000M芯片有正弦脉宽调制(SPWM)功能,并且内部集成了上面的软件计算部分。
的效果")
图7:实测LC08000M正弦脉宽调制(SPWM)的效果








3. 空间矢量脉宽调制(SVPWM)
与SPWM不同,SVPWM施加在电机端线上电压并非等效正弦波电压,此时电机中心点电压并非为0,但电机相电压仍然为等效正弦,从而使得电机相线电流也成正弦变化规则。
三相全桥逆变器共8种开关模式,分别对应八个基本电压空间矢量U0~U7,U0和U7为零矢量,位于原点。其余6个非零矢量幅值相同,相邻矢量间隔60°。根据非零矢量所在位置将空间划分为六个扇区。空间矢量脉宽调制就是利用U0~U7的不同组合,组成幅值相同、相位不同的参考电压矢量Uref,从而使矢量轨迹尽可能逼近基准圆。

图8:基本空间矢量在空间的分布
[page]
图9为参考电压在第一扇区,有两个非零矢量U1U2和零矢量合成,当参考电压进入下一个扇区,采用新的相邻两个矢量与零矢量进行合成。基于矢量合成规则,在符合T1+T2 <= Tpwm条件下,并要求任意角度下V1和V2都能合成出的矢量,所以Uref_max=√3/2 Udc。调制度M=Uref/(Uref_max)=Uref/(√3/2 Udc)

图9:参考电压在第一扇区矢量合成方法

有三角正弦定理可知:

θ角度的推算和前面SPWM里的方法是一样的。为了减少三角函数计算同样采用代码内置Sin三角函数表为了获得最佳的谐波性能和最小开关损耗,目前主要有7段式和5段式空间矢量合成方法。

对比7段式和5段式可知,两者在零矢量的分配上存在很大的区别,单个PWM周期内,5段式方法将零矢量集中插入在中间,转矩脉动大,在低频时会导致明显的走走停停不平稳现象,而7段式方法中零矢量的一半被插入在PWM周期的中间,另一半插入在PWM周期的两边,这样可以使得磁链的运转更加平稳,减少电机转矩的脉动,使得低频时特性明显好于5段式,高频时特性差异不大。但5段式方法中每个PWM周期中,总有一相桥臂的开关管状态不需要改变,而在7段式方法中,每一相桥臂的开关管都需要开关各一次,5段式比7段式开关次数减少1/3,所以5段式的开关功耗是最小的。综合来说在PWM周期达到10KHz以上,5段式更加合适。
举例:角度θ=30°,力矩百分比M=50%,PWM频率20KHz,求三相各PWM的占空比。

LC08000M芯片有空间矢量脉宽调制(SVPWM)功能,同样内部集成了复杂计算功能,采用5段式矢量合成方式,使开关损耗最小。
的效果")
图12:实测LC08000M空间矢量脉宽调制(SVPWM)的效果
小结
LC08000M集成方波120度脉宽调制、正弦脉宽调制、空间矢量脉宽调制三种模式,客户可以自由选择,芯片内部集成模式需要的计算部分,而且具有速度和电流的双闭环功能,同时具备电流电压保护功能,为客户的设计带了很大简化,非常适合BLDC驱动方案的应用